(穿山乙工作室)三天三十元做出智能車
 0.準備所需基本元器件 1).基本二驅(qū)車體一臺。(本課以穿山乙推出的基本車體為例講解) 2).5x7cm洞洞板、單片機卡槽、51單片機、石英晶體、紅色LED、1K電阻、10K排阻各一個;2個瓷片電容、排針40個。 3).5x7cm洞洞板、7805穩(wěn)壓芯片、紅色LED、1K電阻各一個;雙孔接線柱三個、10u電解電容2個、排針12個、9110驅(qū)動芯片2個。 4).5x7cm洞洞板、LM324比較器芯片各一個;紅外對管三對、4.7K電阻3個、330電阻三個、紅色3mmLED三個。
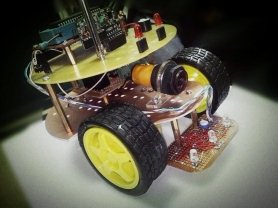
一、組裝車體 (圖中顯示的很清晰吧,照著上螺絲就行了)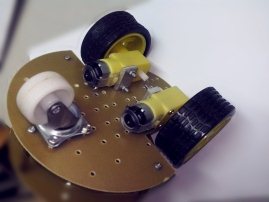  二、制作單片機控制模塊 材料:5x7cm洞洞板、單片機卡槽、51單片機、石英晶體、紅色LED、1K電阻、10K排阻各一個;2個瓷片電容、排針40個。 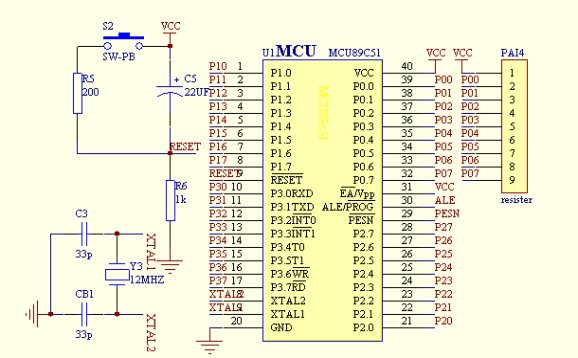 電路圖如下,主要目的是把單片機的各個引腳用排針引出來,便于使用。我們也有焊接好的實物圖供你參考。(如果你選用的是STC98系列的單片機在這里可以省掉復(fù)位電路不焊,仍能正常工作。我實物圖中就沒焊復(fù)位) 電路圖如下,主要目的是把單片機的各個引腳用排針引出來,便于使用。我們也有焊接好的實物圖供你參考。(如果你選用的是STC98系列的單片機在這里可以省掉復(fù)位電路不焊,仍能正常工作。我實物圖中就沒焊復(fù)位)
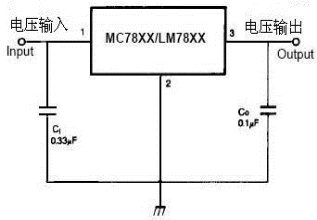
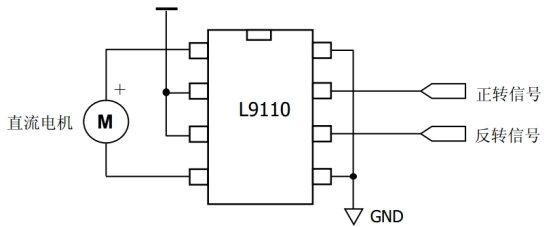
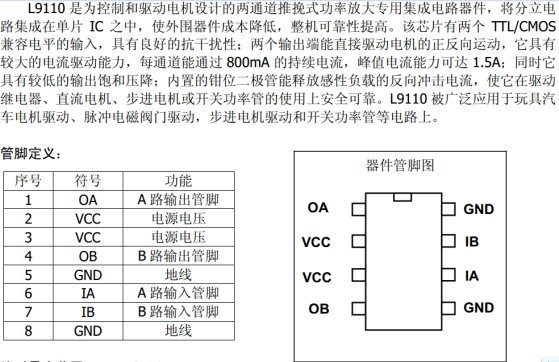
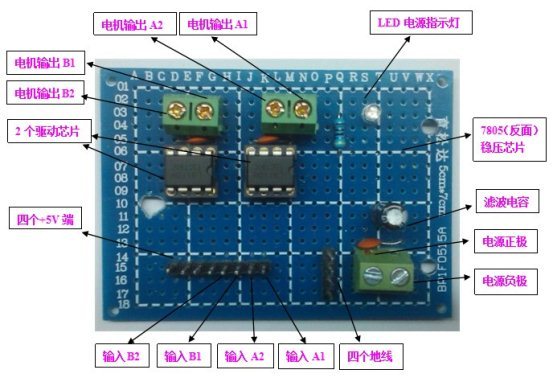
三、制作電機驅(qū)動模塊 材料:5x7cm洞洞板、7805穩(wěn)壓芯片、紅色LED、1K電阻各一個;雙孔接線柱三個、10u電解電容2個、排針12個、9110驅(qū)動芯片2個。 電路圖如下,這里我們把電源模塊與驅(qū)動模塊含在了同一個電路板上。因為電機驅(qū)動模塊所需的電壓是+9V左右(6—15V均可),而單片機主控和循跡模塊所需電壓均為+5V。 這里用了一個7805穩(wěn)壓芯片將+9V電壓穩(wěn)出+5V電壓。
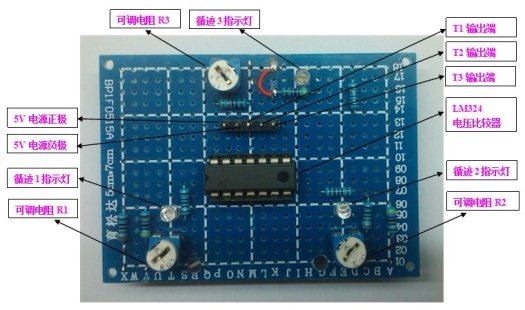
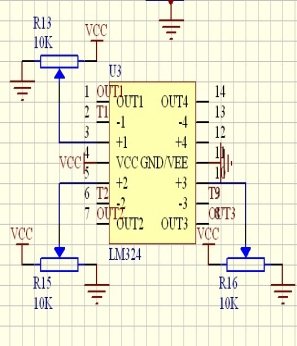
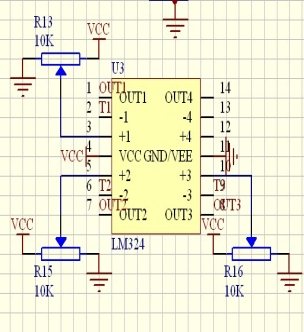
這是工作室做的電源+驅(qū)動模塊,僅作參考 四、制作循跡模塊 材料:5x7cm洞洞板、LM324比較器芯片各一個;紅外對管 三對、4.7K電阻3個、330電阻三個、紅色3mmLED三個。
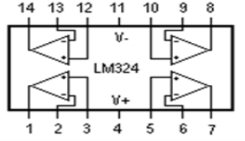
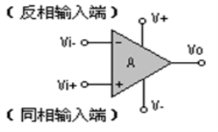
LM324電壓比較器工作原理: 該芯片內(nèi)部有四組比較器,原理就是反相輸入端Vi—與同相輸入端Vi+的電壓進行比較,若Vi+大于Vi—則比較器的輸出端OUT輸出高電平+5V;若Vi+小于Vi—則比較器的輸出 端OUT輸出低電平0V;
TCRT5000紅外對管工作原理: 工作時由藍色發(fā)射管發(fā)射紅外線,紅外線由遮擋物反射回來被接收管接收。接收反射光線后的接收管呈導(dǎo)通狀態(tài),與一電阻串聯(lián)即可構(gòu)成一個由發(fā)射管控制的分壓電路,由此可實現(xiàn)對遮擋物反射光線強度的檢測。我們經(jīng)常利用這一特性去實現(xiàn)黑白顏色識別。
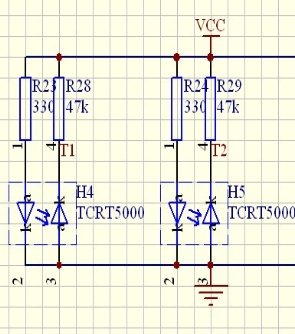
在小車行駛過程中發(fā)射管不斷地向地面發(fā)射紅外光,當紅外光遇到白色地面時發(fā)生漫發(fā)射,反射光被裝在小車上的接收管接收;如果遇到黑線則紅外光被吸收,則小車上的接收管接收不到信號。如圖12軌跡識別電路所示,發(fā)射管(1、2端)與阻值為330歐姆的電阻串聯(lián)發(fā)射紅外線。接收管(3、4)與阻值為47K歐姆的電阻串聯(lián)。在沒有接收到反射光線時接收管截止呈高阻態(tài),TX輸出高電平。當接收管接收到反射光線時,接收管被導(dǎo)通,并且電阻遠小于47K,TX輸出低電平。
 五、組裝連接各模塊 五、組裝連接各模塊供電分配: 單片機主控模塊5V 電機驅(qū)動模塊7V-12V 黑白線循跡模塊5V
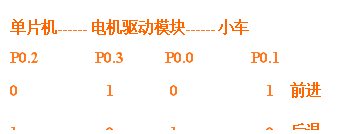
電機驅(qū)動輸入端分別接單片機的P0.0、P0.1、P0.2、P0.3 (這里建議大家把電機驅(qū)動輸入端接到單片機的P0上,因為P0口我們外接有上拉電阻,其他IO口雖然集成上拉電阻但驅(qū)動能力太弱,很不穩(wěn)定。如果你把驅(qū)動輸入端接到P0口仍不太受控,可以嘗試將上拉電阻改為1K或更小的。) 循跡模塊輸出端分別接單片機的P1.0、P1.1、P1.2 注:分別對應(yīng) 右邊的光電管輸出端 (從循跡板對應(yīng)的右邊光電管信號輸出端接至單片機P1.0)、左邊的光電管輸出端(從循跡板對應(yīng)的左邊光電管信號輸出端接至單片機P1.1)、前邊的光電管輸出端(從循跡板對應(yīng)的前邊光電管信號輸出端接至單片機P1.2)
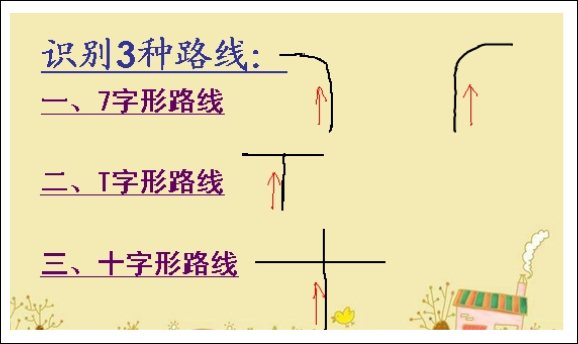
六、各種路線分析
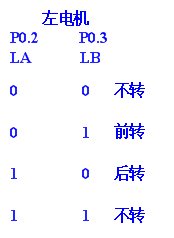
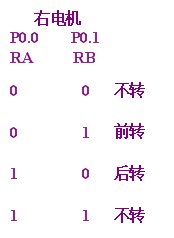
 七、小車運動狀態(tài)設(shè)計 七、小車運動狀態(tài)設(shè)計
八、簡單的三路循跡算法設(shè)計 源程序請到論壇智能車討論區(qū)下載。 該算法僅供參考,(軟件需要配合硬件不同的接法)具體程序代碼應(yīng)由實際情況調(diào)試得出!!! 源程序請到穿山乙工作室下載
| 



 [復(fù)制鏈接]
[復(fù)制鏈接]










 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩
