|
小車走蹺蹺板設計報告
一、設計思路: 對于題目要求,最重要的是制作對于角度的傳感器。我們沒有使用市場上提供的水銀傳感起或者更高級的角度傳感器,而是利用小球及軌道自己實現了一個簡易的平衡儀。 平衡儀的原理是利用小球的慣性,當小車構成某個角度的傾斜的時候,小球因為慣性達到軌道一端,再使用適當的位置傳感器,轉換為電信號輸出給單片機。 單片機收到信號并作確認后,調動電機對小車位置進行調整。故小車在蹺蹺板上反復調整位置,逼近平衡點,直至軌道相對水平,即小車到達平衡點。 具體機械和傳感器部分實現,可見下面小節。
二、機械部分: 機械和光電部分:這部分有2個器件,分別為小車提供平衡的信息和走直線的信息。
- 平衡儀:這是這次工作的關鍵部分,從設計到最后的實現花了許多時間,設計的目標是讓平衡儀提供前傾、后傾、平衡3種位置信息。通過實驗,推翻了2種設計方案,最后完成了平衡儀的制作。
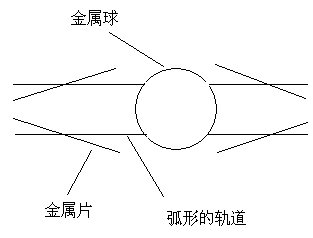
方案1:如右圖所示,利用金屬球使得兩個金屬片直接導通,再配以輔助電路實現信號的傳遞。經過初步的實驗,這一方案就被否決掉了,原因有二:1,收到導軌的限制,小球很難同時接觸到兩個金屬片;2,無法做到小球和金屬片直接的非彈性碰撞,信號不穩定。為了解決這兩個問題,我們設計了第二種方案。
方案2:軌道采用了4片金屬片組成,在軌道中間部分涂上絕緣的涂層(膠水),當小球在左邊或右邊的時候兩片金屬就處于穩定的導通狀態,這樣就解決了方案1的兩個問題。在實際制作中采用的是可樂罐的皮,最后測試時發現有嚴重的接觸不良的問題(猜測是鋁氧化層的關系,如果是鐵片的話應該就可以了)。在已經有軌道的基礎上,我們設計了第三種方案。
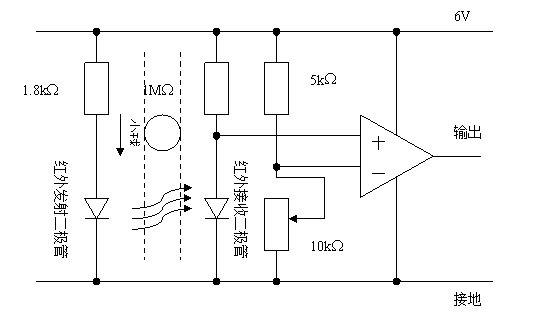
方案3:采用發光二極管和光敏二極管對來傳遞小球的位置信號,當小球擋住光線時,光敏二極管為高阻,沒擋住時為低阻,配以判決電路完成信號的轉換和傳遞。最后實現的是這個方案。
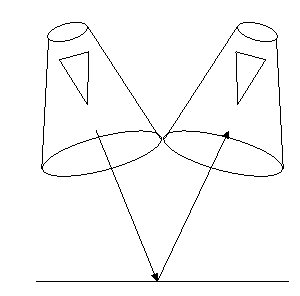 車前燈:由兩組發光、光敏二極管組成,結構如右圖所示,兩個二極管成一定的角度以利于鏡面反射光線的接收,兩個燈罩隔絕自然光以及直接照射。兩組燈與板上黑線配合,如果左燈照到黑線則表示車右偏,反之則左偏。根據光敏二極管阻值變化,配以判決電路完成信號的轉換和傳遞。最后實測中發現小車的機械穩定度足夠,無需車前燈校準。 車前燈:由兩組發光、光敏二極管組成,結構如右圖所示,兩個二極管成一定的角度以利于鏡面反射光線的接收,兩個燈罩隔絕自然光以及直接照射。兩組燈與板上黑線配合,如果左燈照到黑線則表示車右偏,反之則左偏。根據光敏二極管阻值變化,配以判決電路完成信號的轉換和傳遞。最后實測中發現小車的機械穩定度足夠,無需車前燈校準。
二、硬件部分: 本試驗的硬件部分主要是三個部分: 供電部分的電源為8V,直接供給電機所需。另一部分經過分壓供給光電門所需電壓。
根據光電門特性,供電需要6V即可,故根據實驗結果,串聯發光二極管,可以分壓2V。同時提供光電門供電正常指示燈。 2.光電門電路部分: 光電門部分主要電路是提供一個門限電壓判決門,如果有小球經過光電門,根據電壓變化輸出信號,反饋單片機。 具體電路如下圖所示: - 兩個光電門的輸出連接到單片機的P0和P1腳,如圖所示:

圖01片1.png (566.88 KB, 下載次數: 72)
下載附件
2018-10-24 00:04 上傳
四、程序部分: 1、對于小車走蹺蹺板的策略如下: 先向前開,直到過平衡點,傳感器得到的狀態信號發生改變。然后小車改變行進方向,改為向后開,并且速度慢。接著直到傳感器狀態再次改變,說明又過了平衡點,此時小車再次改變方向并減速。重復上面的過程直到小車到最低速。這部分是大致定位。 最后,小車以最低速行駛,根據傳感器的狀態決定行進方向,調整位置,每行進一定時間便停一下,使傳感器能正確表示小車狀態。經過幾次調整后停下,實現精確定位。 2、小車程序的具體實現。 程序對小車馬達的控制是由時間中斷來實現的。小車的速度與方向的調節是由調節輸出的pwm波實現。在每個時鐘中斷,輸出pwm波控制馬達,根據小車應有速度與方向決定輸出pwm信號的高低,使馬達在一定的時間內工作一段時間,停一段時間。 程序的傳感器部分也是由時間中斷實現。每隔一定時間,程序對傳感器采樣一次。由于傳感器是機械結構,導致傳感器的信號毛刺較多,故程序采用統計辦法除毛刺。統計一定時間內的采樣信號,突破門限值的狀態即為當前狀態。若沒有突破門限值的狀態,則保持原狀態不變。 程序的策略部分在根據傳感器調節速度的部分實現。通過小車所處狀態來決定下面的策略,調整速度與方向。
五、作品及結果: 綜合上述三個部分,我們完成小車作品。 實驗結果:小車在有配重蹺蹺板上,幾乎能夠作到,一次找到平衡點。我們調整了小車精度,小車能夠作到不斷逼近平衡點位置。 在無配重蹺蹺板上,小車也能有限次尋找平衡,并在最后亮燈提示找到平衡點。
六、實驗存在的問題: 1.蹺蹺板沒有阻尼。因為蹺蹺板很長,所以其轉動慣量特別大。在小車尋找平衡位置時,對蹺蹺板起力矩作用,引起蹺蹺板來回振蕩。 因為沒有阻尼,且轉動慣量特別大,振蕩很難停止,這個現象在加配重時尤為明顯。即使小車到達平衡位置,蹺蹺板仍然來回諧振,造成未平衡假象,誤導小車,使小車無法準確作出判斷。 解決方案:最佳解決方案是為蹺蹺板加上阻尼。在實驗室條件無法滿足,我們在程序上加上了一定的保護,對這種情況加了相關判斷,提示小車可以最終調整收斂到平衡點。 2.小車啟動加速度。小車啟動加速度很大,主要是該電機與輪子不匹配。輪子轉動存在功率門限:只有達到一定功率才能啟動小車。這使得小車無法慢速前進,在最后微調時,無法精確找到平衡位置。同時啟動加速度惡化了蹺蹺板轉動慣量問題,為其提供了力矩。 解決方案:使用更好的車輪,或使用履帶和齒輪組替代現有車輪。限于實驗室條件和時間,在本實驗中沒有實現。
完整的Word格式文檔51黑下載地址:
 小車走蹺蹺板設計報告.doc
(396.5 KB, 下載次數: 8)
小車走蹺蹺板設計報告.doc
(396.5 KB, 下載次數: 8)
2018-10-24 00:04 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
| 












 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

