|
ѭ�E����һ�wС܇ - С܇���܌�(sh��)�F(xi��n)����
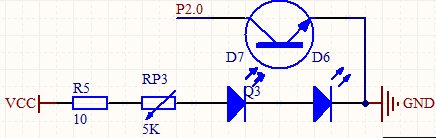
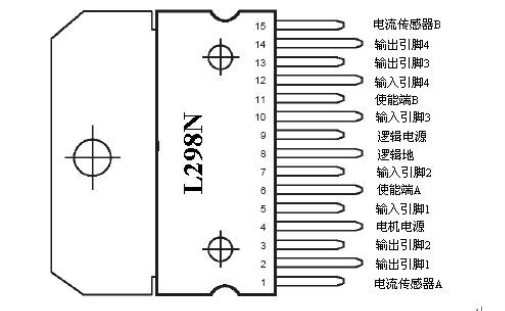
���ù�늂��У��t�⌦(du��)��ܣ��t��l(f��)���c���ն��O�ܽM�ɣ��z�y(c��)�ڰ�����(sh��)�F(xi��n)С܇�ܸ���������ھ������ߣ�ͬ�r(sh��)Ҳ�ɱ��_�ϵK���С܇���E�^(gu��)���У������ϵK��������@�_���@�_���^�m(x��)���E�� ѭ�E��늂�����ԭ�������úڰ���(du��)�t�⾀��ͬ�ķ���������Ȼ��ͨ�^(gu��)�������O�ܻ�������O�ܣ����շ���صIJ�ͬ�⏊(qi��ng)��̖(h��o)���Ѳ�ͬ�⏊(qi��ng)�D(zhu��n)�Q�������̖(h��o)�����ͨ�^(gu��)��裬�D(zhu��n)�Q���Ƭ�C(j��)���R(sh��)�e�ĸߵ��ƽ����늂�������(sh��)�F(xi��n)ѭ�E�Ļ����·���D��ʾ  �� ѭ�E�����������· �·��ጣ�TC���ǂ������������ƶˣ�����ƽ�r(sh��)���l(f��)����O�ܲ����������������ߣ�����ƽ�r(sh��)������������(d��ng)��Signal�˞�z�y(c��)��̖(h��o)ݔ������(d��ng)�����ھ����ھ����մ����ļt�⾀������ļt�⾀�������������O�ܲ���(d��o)ͨ��signalݔ�����ƽ����(d��ng)���������c�ھ��෴������ļt�⾀��(qi��ng)��ʹ�������O�܌�(d��o)ͨ��signalݔ�����ƽ�� ���E���� �{(di��o)�����҂�����֮�g�ľ��x����̽�^���x�s���ڰ���������m��һ��������x����3 �C 5 ���ױ��^���m��ע�⣺ԓ���������`�����ǿ��{(di��o)�ģ�ż���������������s�����ͳ�����(y��ng)����̖(h��o)��ͨ�^(gu��)�{(di��o)��(ji��)�������ϵĿ��{(di��o)��裬�m��(d��ng)?sh��)������pС�`���ȡ����⣬ѭ�E�������İ���Ҳ���DZ��^���v���ģ��ЃɷN������һ�N�ǃɂ�(g��)���Ƿ����ڰ���(n��i)��(c��)���o�N��߅�����ڶ��N�Ƕ������ڰ������(c��)��ͬ�Ӿo�N��߅�����҂�ͨ�����õڶ��N������ ��������ʹС܇�����r(sh��)��С܇�������ߡ���(d��ng)С܇��ǰǰ�M(j��n)�r(sh��)���������ƫ�x�˰�����ô��߅��������(hu��)�a(ch��n)��һ��(g��)���ƽ����Ƭ�C(j��)�Д��@��(g��)��̖(h��o)��Ȼ�����ҹա��ص����ɂ�����ݔ����̖(h��o)����ƽ��С܇ǰ�M(j��n)�����С܇����ƫ�x������߅�������a(ch��n)��һ��(g��)���ƽ����Ƭ�C(j��)�Д��@��(g��)��̖(h��o)��Ȼ������ա������ˣ�С܇�ز�ƫ�x������С܇�ăɌ�(du��)��늂�����ͬ�r(sh��)ݔ������̖(h��o)����ƽ���ڵף�����ƽ���ף�������Ƭ�C(j��)�Д�Ķ�����ƽ����ƽ��С܇��ǰֱ�ߣ��ڴ��^(gu��)���У�ֱ�ߣ�С܇��������С܇���؏�(f��)�����(d��ng)���������ߡ� ���ϲ��� ��(d��ng)С܇�ڌ��E����������ֱ�ߣ��^(gu��)�������ϵK�С܇��������D(zhu��n)�����D(zhu��n)����(d��ng)����ɺ����^�m(x��)���E�� 늙C(j��)�(q��)��(d��ng)оƬ����L298N����һ����ܸ߉��������ȫ����ֱ��/���M(j��n)늉��(q��)��(d��ng)�������D 늙C(j��)����оƬL298N�����_����
L298N���_��̖(h��o)�c���� | | | | | ��ԓ���_�͵�֮�g��С��ֵ�����Á�(l��i)�z�y(c��)��� | | | ��(n��i)���(q��)��(d��ng)��A��ݔ����1������늙C(j��)A | | | ��(n��i)���(q��)��(d��ng)��A��ݔ����2������늙C(j��)A | | | 늙C(j��)���ݔ���,늉����_(d��)46V | | | ��(n��i)���(q��)��(d��ng)��A��߉����ݔ���1 | | | ��(n��i)���(q��)��(d��ng)��A��ʹ�ܶ� | | | ��(n��i)���(q��)��(d��ng)��A��߉����ݔ���2 | | | | | | | | | ��(n��i)���(q��)��(d��ng)��B��߉����ݔ���1 | | | ��(n��i)���(q��)��(d��ng)��B��ʹ�ܶ� | | | ��(n��i)���(q��)��(d��ng)��B��߉����ݔ���2 | | | ��(n��i)���(q��)��(d��ng)��B��ݔ����1������늙C(j��)B | | | ��(n��i)���(q��)��(d��ng)��B��ݔ����2������늙C(j��)B | | | ��ԓ���_�͵�֮�g��С��ֵ�����Á�(l��i)�z�y(c��)��� |
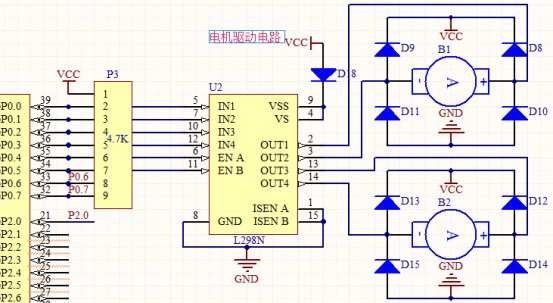
L298N��(n��i)��ԭ��D 늙C(j��)�(q��)��(d��ng)A/B�Ŀ���߉���±���ʾ | 늙C(j��)�\(y��n)��(d��ng)��ʽ | | | | | | | | | | | | | | | | | | | | | | | |
늙C(j��)�(q��)��(d��ng)A/B�Ĺ���ԭ�� 늙C(j��)����߉���£���늙C(j��)A��������(d��ng)ʹ�ܶ�A����ƽ�ǣ����ݔ���M1 Direction���_����ƽ�����O�܌�(d��o)ͨ��ݔ�����_1����ƽ��ݔ�����_2����ƽ��늙C(j��)A���D(zhu��n)�����ݔ���M1 Direction���_����ƽ�����O�ܽ�ֹ��ݔ�����_1����ƽ��ݔ�����_2����ƽ��늙C(j��)A���D(zhu��n)��
늙C(j��)�(q��)��(d��ng)ԭ��D
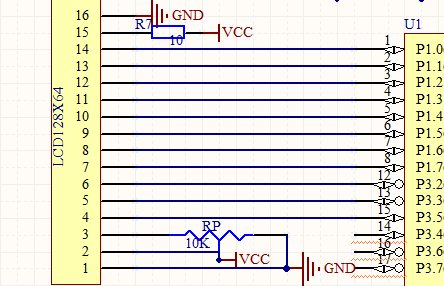
�������֎�(k��)��128X64��һ�N����4λ/8λ���С�2����3�����ж�N�ӿڷ�ʽ����(n��i)�����Ї�(gu��)��(bi��o)һ��(j��)������(j��)��(ji��n)�w�����֎�(k��)���c(di��n)ꇈD��Һ���@ʾģ�K�����@ʾ�ֱ��ʞ�128��64, ��(n��i)��8192��(g��)16*16�c(di��n)�h�֣���128��(g��)16*8�c(di��n)ASCII�ַ���������ԓģ�K�`��Ľӿڷ�ʽ�ͺ�(ji��n)�Ρ�����IJ���ָ��ɘ�(g��u)��ȫ�����˙C(j��)�����D�ν��档�����@ʾ8��4��16��16�c(di��n)ꇵĝh�֣�Ҳ����ɈD���@ʾ�����е�늉��������c(di��n)����ԓģ�K��(g��u)�ɵ�Һ���@ʾ�����cͬ��͵ĈD���c(di��n)�Һ���@ʾģ�K��ȣ���ՓӲ���·�Y(ji��)��(g��u)���@ʾ����Ҫ��(ji��n)���ö࣬��ԓģ�K�ăr(ji��)��Ҳ�Ե�����ͬ�c(di��n)ꇵĈD��Һ��ģ�K�� ��������: ���Դ늉���VDD:+3.0--+5.5V��
�@ʾ�ֱ���:128��64�c(di��n)
��(n��i)�Ýh���֎�(k��)���ṩ8192��(g��)16��16�c(di��n)ꇝh��(��(ji��n)���w���x)
��(n��i)�� 128��(g��)16��8�c(di��n)��ַ�
2MHZ�r(sh��)��l��
�@ʾ��ʽ��STN���������@
�(q��)��(d��ng)��ʽ��1/32DUTY��1/5BIAS
ҕ�Ƿ���6�c(di��n)
���ⷽʽ����(c��)��������ɫLED�����ăH����ͨLED��1/5��1/10
ͨӍ��ʽ�����С����ڿ��x
��(n��i)��DC-DC�D(zhu��n)�Q�·���o(w��)�����ؓ(f��)��
�o(w��)��Ƭ�x��̖(h��o)����(ji��n)��ܛ���O(sh��)Ӌ(j��)
�����ض�: 0�� - +55�� ,�惦(ch��)�ض�: -20�� - +60��
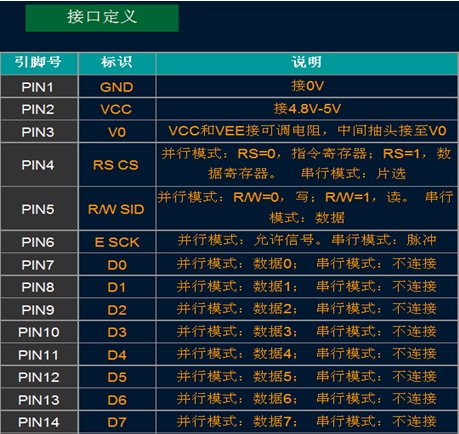
ģ�K�ӿ��f(shu��)����
*ע��1�����ڌ�(sh��)�H��(y��ng)���ЃHʹ�ò���ͨӍģʽ���Ɍ�PSB�ӹ̶����ƽ��Ҳ���Ԍ�ģ�K�ϵ�J8�͡�VCC���ú��a�̽ӣ�2��ģ�K��(n��i)��������늏�(f��)λ�·������ڲ���Ҫ��(j��ng)����(f��)λ�Ĉ�(ch��ng)�ϿɌ�ԓ�ˑҿգ�3���米���ģ�K����һ��(g��)�Դ�����Ԍ�ģ�K�ϵ�JA��JK�ú��a�̽ӡ� ���_������̖(h��o)��(y��ng)�� D/I��R/W������x��Q�����ƽ����4�Nģʽ��
D/I | R/W | �����f(shu��)�� | L | L | MPU��ָ�ָ�������IR�� | L | H | �x��æ��(bi��o)־��BF������ַӛ��(sh��)����AC���Ġ�B(t��i) | H | L | MPU���딵(sh��)��(j��)����(sh��)��(j��)��������DR�� | H | H | MPU�Ĕ�(sh��)��(j��)��������DR�����x����(sh��)��(j��) |
E��̖(h��o)������ E��B(t��i) | ��(zh��)�Є�(d��ng)�� | �Y(ji��)�� | �ߡ���>�� | I/O���_����>DR | ���/W�M(j��n)�Ќ���(sh��)��(j��)��ָ�� | �� | DR����>I/O���_ | ���R�M(j��n)���x��(sh��)��(j��)��ָ�� | ��/�͡���>�� | �o(w��)��(d��ng)�� |
|
��(n��i)���Ĵ�����̖(h��o) �� æ��(bi��o)־:BF
BF��(bi��o)־�ṩ��(n��i)��������r��BF=1��ʾģ�K���M(j��n)�Ѓ�(n��i)���������˕r(sh��)ģ�K�������ⲿָ��͔�(sh��)��(j��)��BF=0�r(sh��)��ģ�K���(zh��n)���B(t��i)���S�r(sh��)�ɽ����ⲿָ��͔�(sh��)��(j��)������STATUS RD ָ����Ԍ�BF�x��DB7�������Ķ��z�(y��n)?z��i)��K֮������B(t��i)�� �����ͮa(ch��n)��ROM��CGROM��
���ͮa(ch��n)��ROM��CGROM���ṩ8192��(g��)���|�l(f��)��������ģ�K��Ļ�@ʾ�_���P(gu��n)�Ŀ��ơ�DFF=1���_�@ʾ��DISPLAY ON)��DDRAM�ă�(n��i)�ݾ��@ʾ����Ļ�ϣ�DFF=0���P(gu��n)�@ʾ��DISPLAY OFF)��DFF �Ġ�B(t��i)��ָ��DISPLAY ON/OFF��D/IT��̖(h��o)���Ƶġ� �� �@ʾ��(sh��)��(j��)RAM��DDRAM��
ģ�K��(n��i)���@ʾ��(sh��)��(j��)RAM�ṩ64��2��(g��)λԪ�M�Ŀ��g�����ɿ���4��16�֣�64��(g��)�֣������������@ʾ����(d��ng)�����@ʾ��(sh��)��(j��)RAM�r(sh��)���ɷքe�@ʾCGROM�cCGRAM�����ͣ���ģ�K���@ʾ���N���ͣ��քe�ǰ��Ӣ��(sh��)����(16*8)��CGRAM���ͼ�CGROM���������ͣ����N���͵��x������DDRAM�Ќ���ľ��a�x���ڴ��A��0000H��0006H�ľ��a�У�����a�քe��0000��0002��0004��0006��4��(g��)�����x��CGRAM���Զ��x���ͣ�02H��7FH�ľ��a�Ќ��x����Ӣ��(sh��)�ֵ����ͣ�����A1���ϵľ��a���Ԅ�(d��ng)�ĽY(ji��)����һ��(g��)λԪ�M���M�Ƀɂ�(g��)λԪ�M�ľ��a�γ��������͵ľ��aBIG5��A140��D75F����GB��A1A0-F7FFH���� �����ͮa(ch��n)��RAM(CGRAM)
���ͮa(ch��n)��RAM�ṩ�D���x(����)����,�����ṩ�ĽM16��16�c(di��n)���Զ��x�D����g��ʹ���߿��Ԍ���(n��i)�����͛](m��i)���ṩ�ĈD���������ж��x��CGRAM�У���ɺ�CGROM�еĶ��xһ�ӵ�ͨ�^(gu��)DDRAM�@ʾ����Ļ�С� �� ��ַӋ(j��)��(sh��)��AC
��ַӋ(j��)��(sh��)��AC��ַӋ(j��)��(sh��)�����Á�(l��i)�A��DDRAM/CGRAM֮һ�ĵ�ַ,�������O(sh��)��ָ�������(l��i)��׃��֮��ֻҪ�xȡ���nj���DDRAM/CGRAM��ֵ�r(sh��)����ַӋ(j��)��(sh��)����ֵ�͕�(hu��)�Ԅ�(d��ng)��һ����(d��ng)D/I�顰0���r(sh��)��R/W�顰1���r(sh��)����ַӋ(j��)��(sh��)����ֵ��(hu��)���xȡ��DB6����DB0�С� ����(bi��o)/�W�q�����·
��ģ�K�ṩӲ�w���(bi��o)���W�q�����·���ɵ�ַӋ(j��)��(sh��)����ֵ��(l��i)ָ��DDRAM�еĹ��(bi��o)���W�qλ�á� ָ������ ģ�K����оƬ�ṩ�������������ָ��͔U(ku��)��ָ�����£� ָ���1����RE=0������ָ� ָ�� | ָ �� �a | �� �� | D/I | R/W | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | ��� �@ʾ | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | ��DDRAM��M"20H",�����O(sh��)��DDRAM�ĵ�ַӋ(j��)��(sh��)��(AC)��"00H" | ��ַ �wλ | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | X | �O(sh��)��DDRAM�ĵ�ַӋ(j��)��(sh��)��(AC)��"00H",���Ҍ��Θ�(bi��o)�Ƶ��_�^ԭ�c(di��n)λ��;�@��(g��)ָ���׃DDRAM �ă�(n��i)�� | �@ʾ��B(t��i)
�_/�P(gu��n) | 0 | 0 | 0 | 0 | 0 | 0 | 1 | D | C | B | D=1: ���w�@ʾ ON C=1: �Θ�(bi��o)ON B=1:�Θ�(bi��o)λ�÷������S | �M(j��n)���c(di��n)�O(sh��)�� | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | I/D | S | ָ���ڔ�(sh��)��(j��)���xȡ�c����r(sh��),�O(sh��)���Θ�(bi��o)���Ƅ�(d��ng)����ָ���@ʾ����λ | �Θ�(bi��o)���@ʾ��λ���� | 0 | 0 | 0 | 0 | 0 | 1 | S/C | R/L | X | X | �O(sh��)���Θ�(bi��o)���Ƅ�(d��ng)�c�@ʾ����λ����λ;�@��(g��)ָ���׃DDRAM �ă�(n��i)�� | ����
�O(sh��)�� | 0 | 0 | 0 | 0 | 1 | DL | X | RE | X | X | DL=0/1��4/8λ��(sh��)��(j��) RE=1: �U(ku��)��ָ����� RE=0: ����ָ����� | �O(sh��)��CGRAM��ַ | 0 | 0 | 0 | 1 | AC5 | AC4 | AC3 | AC2 | AC1 | AC0 | �O(sh��)��CGRAM ��ַ | �O(sh��)��DDRAM��ַ | 0 | 0 | 1 | 0 | AC5 | AC4 | AC3 | AC2 | AC1 | AC0 | �O(sh��)��DDRAM ��ַ���@ʾλַ�� ��һ�У�80H��87H �ڶ��У�90H��97H | �xȡæ��(bi��o)־�͵�ַ | 0 | 1 | BF | AC6 | AC5 | AC4 | AC3 | AC2 | AC1 | AC0 | �xȡæ��(bi��o)־(BF)���Դ_�J(r��n)��(n��i)����(d��ng)���Ƿ����,ͬ�r(sh��)�����x����ַӋ(j��)��(sh��)��(AC)��ֵ | ����(sh��)��(j��)��RAM | 1 | 0 | ��(sh��)��(j��) | ����(sh��)��(j��)D7����D0���뵽��(n��i)����RAM (DDRAM/CGRAM/IRAM/GRAM) | �x��RAM��ֵ | 1 | 1 | ��(sh��)��(j��) | �ă�(n��i)��RAM�xȡ��(sh��)��(j��)D7����D0(DDRAM/CGRAM/IRAM/GRAM) |
ָ���2����RE=1���U(ku��)��ָ� ָ�� | ָ �� �a | �� �� | D/I | R/W | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | ����
ģʽ | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | �M(j��n)�����ģʽ,��(zh��)������ָ��Kֹ | ���(d��ng)��ַ�_�P(gu��n)�_�� | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | SR | SR=1�����Sݔ�봹ֱ���(d��ng)��ַ SR=0�����Sݔ��IRAM��CGRAM��ַ | ����
�x�� | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | R1 | R0 | �x��2���е���һ���������@ʾ�����ɛQ�������c��ʼֵR1R0��00����һ���O(sh��)���鷴���@ʾ���ٴ��O(sh��)��׃������ | ˯��
ģʽ | 0 | 0 | 0 | 0 | 0 | 0 | 1 | SL | X | X | SL=0���M(j��n)��˯��ģʽ
SL=1��Ó�x˯��ģʽ | �U(ku��)�书���O(sh��)�� | 0 | 0 | 0 | 0 | 1 | CL | X | RE | G | 0 | CL=0/1��4/8λ��(sh��)��(j��) RE=1: �U(ku��)��ָ����� RE=0: ����ָ����� G=1/0���L�D�_�P(gu��n) | �O(sh��) ��
�L�DRAM
�� ַ | 0 | 0 | 1 | 0 AC6 | 0 AC5 | 0 AC4 | AC3 AC3 | AC2 AC2 | AC1 AC1 | AC0 AC0 | �O(sh��)���L�DRAM
���O(sh��)����ֱ(��)
AC6AC5��AC0
���O(sh��)��ˮƽ(��)��ַAC3AC2AC1AC0
������16λ��ַ�B�m(x��)���뼴�� |
ע����(d��ng)IC1�ڽ���ָ��ǰ,̎��������ȴ_�J(r��n)���(n��i)��̎�ڷ�æµ��B(t��i),���xȡBF��(bi��o)־�r(sh��),BF�����,���ɽ����µ�ָ��;������ͳ�һ��(g��)ָ��ǰ�����z��BF��(bi��o)־,��ô��ǰһ��(g��)ָ����@��(g��)ָ�����g������L(zh��ng)һ���^�L(zh��ng)�ĕr(sh��)�g,���ǵȴ�ǰһ��(g��)ָ��_��(sh��)��(zh��)����ɡ� �����@ʾ��(y��ng)�� 1���ַ��@ʾ �������֎�(k��)��128X64-0402Bÿ�����@ʾ4��8�й�32��(g��)16��16�c(di��n)ꇵĝh�֣�ÿ��(g��)�@ʾRAM���@ʾ1��(g��)�����ַ���2��(g��)16��8�c(di��n)�ȫ��ASCII�a�ַ�����ÿ�����Ɍ�(sh��)�F(xi��n)32��(g��)�����ַ���64��(g��)ASCII�a�ַ����@ʾ���������֎�(k��)��128X64-0402B��(n��i)���ṩ128��2�ֹ�(ji��)���ַ��@ʾRAM���_�^(q��)��DDRAM�����ַ��@ʾ��ͨ�^(gu��)���ַ��@ʾ���a����ԓ�ַ��@ʾRAM��(sh��)�F(xi��n)�ġ�����(j��)�����(n��i)�ݵIJ�ͬ���ɷքe��Һ�������@ʾCGROM�������֎�(k��)����HCGROM��ASCII�a�֎�(k��)����CGRAM���Զ��x���Σ��ă�(n��i)�ݡ����N��ͬ�ַ�/���͵��x�a�����飺0000��0006H������a�քe��0000��0002��0004��0006��4��(g��)���@ʾ�Զ��x���ͣ�02H��7FH�@ʾ�댒ASCII�a�ַ���A1A0H��F7FFH�@ʾ8192�NGB2312�����֎�(k��)���Ρ��ַ��@ʾRAM��Һ��ģ�K�еĵ�ַ80H��9FH���ַ��@ʾ��RAM�ĵ�ַ�c32��(g��)�ַ��@ʾ�^(q��)������һһ��(du��)��(y��ng)���P(gu��n)ϵ���䌦(du��)��(y��ng)�P(gu��n)ϵ���±���ʾ�� 80H | 81H | 82H | 83H | 84H | 85H | 86H | 87H | 90H | 91H | 92H | 93H | 94H | 95H | 96H | 97H | 88H | 89H | 8AH | 8BH | 8CH | 8DH | 8EH | 8FH | 98H | 99H | 9AH | 9BH | 9CH | 9DH | 9EH | 9FH |
���У�C�Z(y��)�Ծ��g������ֱ�Ӱ������D(zhu��n)�Q��ASCII�a�ַ����ܡ���(du��)������ԭ��D�����g����ʾ���������d����(sh��)�(y��n)���ϣ��^�y(c��)�F(xi��n)��
������Word��ʽ�ęn51�����d��ַ��
 ���E����һ�wС܇.rar
(284.63 KB, ���d��(sh��): 22)
���E����һ�wС܇.rar
(284.63 KB, ���d��(sh��): 22)
2018-9-11 20:24 �ς�
�c(di��n)���ļ������d����
ѭ�E����һ�wС܇ ���d�e��: �ڎ� -5
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664






 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��