Ŀ�
һ����(sh��)�ػ��D(zhu��n)�����_(t��i)��ԭ���c��(y��ng)��
1.1��(sh��)�ػ��D(zhu��n)�����_(t��i)
1.2 �O(sh��)Ӌ(j��)��(zh��n)�t
1.3 ��Ҫ���g(sh��)����(sh��)
1.4 �����Y(ji��)
������(sh��)�ػ��D(zhu��n)�����_(t��i)�IJ���ԭ�����Y(ji��)��(g��u)�O(sh��)Ӌ(j��)
2.1 ���M(j��n)늙C(j��)��ԭ��
2.2 ����(d��ng)����?j��ng)��?d��ng)�r(sh��)��(y��ng)�M���Ҫ��
2.3��(sh��)�ػ��D(zhu��n)�����_(t��i)���ܵČ�(sh��)�F(xi��n)
2.4 ���M(j��n)늙C(j��)���x�C(j��)еϵ�y(t��ng)�O(sh��)Ӌ(j��)
2.5�S��x��
2.6 �S�е���϶���S��������{(di��o)��
2.7 �L��(d��ng)�S����
2.8 �L��(d��ng)�S�еĝ�(r��n)��
�������ƺ��(q��)��(d��ng)ϵ�y(t��ng)�O(sh��)Ӌ(j��)
3.1 ϵ�y(t��ng)�����O(sh��)Ӌ(j��)��(g��u)��
1. ����ϵ�y(t��ng)��(y��ng)�M��ėl��
2. ����ϵ�y(t��ng)���O(sh��)Ӌ(j��)
3. ��Ƭ�C(j��)
�ġ�����ϵ�y(t��ng)����
���Y(ji��)
�wՓ
�n���O(sh��)Ӌ(j��)��Ҫ�����B(y��ng)�W(xu��)���C�ϑ�(y��ng)�����W(xu��)���I(y��)�Ļ��A(ch��)��Փ���������ܺ͌��I(y��)֪�R(sh��)�����������B(y��ng)�W(xu��)���������_���O(sh��)Ӌ(j��)˼�룬���չ����O(sh��)Ӌ(j��)��һ�����Ҏ(gu��)���ͷ�����������W(xu��)������(y��ng)��(c��)���ڏ����a(ch��n)�ĵ�һ���@�îa(ch��n)Ʒ�Ĺ�ˇ������O(sh��)Ӌ(j��)˼·���@�ù��̼��g(sh��)��(j��ng)���ԍ�λ�Ļ���Ӗ(x��n)����ͨ�^�n���O(sh��)Ӌ(j��)���ɘ������_�Ľ�(j��ng)��(j��)�^�c(di��n)��ȫ���^�c(di��n)����(sh��)�F(xi��n)�ɌW(xu��)���̼��g(sh��)�ˆT���^�ɡ�
ʹ�W(xu��)���M(j��n)һ��얹̺ͼ��(du��)���W(xu��)��֪�R(sh��)��ʹ֮ϵ�y(t��ng)�����C�ϻ������B(y��ng)�W(xu��)����(d��)����������(d��)��˼���;C���\(y��n)�����W(xu��)֪�R(sh��)�ļ��ܣ���߽�Q�����I(y��)������(n��i)��һ�㹤�̼��g(sh��)���}���������Ķ��U(ku��)������W(xu��)�Č��I(y��)֪�R(sh��)�ͼ��ܡ����B(y��ng)�W(xu��)�����O(sh��)Ӌ(j��)Ӌ(j��)�㡢�����L�D����(sh��)�(y��n)�о�����(sh��)��(j��)̎��������īI(xi��n)�������Y�ϵ���x�c���g��Ӌ(j��)��C(j��)��(y��ng)�á����ֱ��_(d��)�Ȼ���������(sh��)�`������ʹ�W(xu��)���������տƌW(xu��)�о��Ļ���������˼·��ʹ�W(xu��)���W(xu��)��(hu��)�������ս�Q���̼��g(sh��)���}�����_ָ��(d��o)˼�롢�����ֶΣ���������(y��n)֔(j��n)����(y��n)�C�J(r��n)�桢һ�z��ƈ����(sh��)�����ǡ��̿��@�С�����̽�������Є�(chu��ng)�����R(sh��)�͈F(tu��n)�Y(ji��)�f(xi��)���Ĺ������L(f��ng)��
�����n���O(sh��)Ӌ(j��)��Ҫ�ǽ�Q��(sh��)�ػ��D(zhu��n)�����_(t��i)�Ĺ���ԭ���Ϳ���ϵ�y(t��ng)���O(sh��)Ӌ(j��)���O(sh��)Ӌ(j��)˼·���ȹ��������ϵ�y(t��ng)�Y(ji��)��(g��u)��Ŀǰ��(sh��)�ػ��D(zhu��n)�����_(t��i)�яV����(y��ng)���ڔ�(sh��)�ؙC(j��)���ͼӹ������ϣ����Ŀ��İl(f��)չڅ��(sh��)�ǣ���Ҏ(gu��)���ό�����^���죬���_�l(f��)С�ͺʹ����D(zhu��n)�_(t��i)���������ό�������䓞���ϵ�݆���������߹����_(t��i)�D(zhu��n)�ٺ��D(zhu��n)�_(t��i)�ij��d����������ʽ���^�m(x��)���ƃ��S(li��n)��(d��ng)�Ͷ��S��(li��n)���D(zhu��n)�Ĕ�(sh��)���D(zhu��n)�_(t��i)��
��(sh��)���D(zhu��n)�_(t��i)���Ј�(ch��ng)�������S���҇�����I(y��)�İl(f��)չ���ӹ����Č���(hu��)Խ��Խ��ر�Ҫ���������S������S���ԔU(ku��)��ӹ���������Ӌ(j��)������Ҫ����䔵(sh��)���D(zhu��n)�_(t��i)�ļӹ����Č���(hu��)�_(d��)��ÿ��600�_(t��i)���ҡ��A(y��)Ӌ(j��)δ��5�꣬�mȻijЩ�ИI(y��)���ڮa(ch��n)���^ʣ���ܵ����^�{(di��o)�ص�Ӱ푶��^�m(x��)�������^�͵��ИI(y��)������⣬�����b������I(y��)�����������^�ߵ����L(zh��ng)�ʣ��e����Щ���Үa(ch��n)�I(y��)���߹Ą�(l��)���d�Ͱl(f��)չ���b�����ИI(y��)�������b������I(y��)��ĸ�C(j��)����ͨ�ӹ��C(j��)�����@�����15����20�����ҵķ�(w��n)�����L(zh��ng)
- ��(sh��)�ػ��D(zhu��n)�����_(t��i)��ԭ���c��(y��ng)��
��(sh��)�ؙC(j��)���ĈA���M(j��n)�o�ɻ��D(zhu��n)�����_(t��i)��ɣ��Q�锵(sh��)�ؙC(j��)���ĵ����S�����D(zhu��n)�����_(t��i)�����cX��Y��Z����(g��)����(bi��o)�S(li��n)��(d��ng)���Ķ��ӹ������N�A�������ȡ����D(zhu��n)�����_(t��i)���Ԍ�(sh��)�F(xi��n)���_���Ԅ�(d��ng)�ֶȣ��U(ku��)���˔�(sh��)�ؙC(j��)���ӹ�������
1.1��(sh��)�ػ��D(zhu��n)�����_(t��i)��(sh��)�ػ��D(zhu��n)�����_(t��i)��Ҫ���ڔ�(sh��)���M����㊴��������κ�ͨ�ù����_(t��i)��һ�ӣ��������(q��)��(d��ng)���ŷ�ϵ�y(t��ng)���(q��)��(d��ng)��ʽ���������c�����ŷ��M(j��n)�o�S(li��n)��(d��ng)�� �Ԅ�(d��ng)�Q����(sh��)���M���Ļ��D(zhu��n)�����_(t��i)���M(j��n)�o���ֶ��D(zhu��n)λ�Ͷ�λ�i�o�����ɽo����ָ���M(j��n)�п��Ƶġ������_(t��i)���\(y��n)��(d��ng)�����ŷ�늄�(d��ng)�C(j��)����(j��ng)�X݆�p�ٺ����U���o݆ ��
���������U���Ă���(d��ng)�g϶���������p�ݾ��u���U��ͨ�^�Ƅ�(d��ng)�U���S��λ�����{(di��o)���g϶���@�N�U�����҃ɂ�(c��)����в�ͬ���ݾ࣬����U�X����^��β��u��������ͬһ��(c��)���ݾ�����ͬ�ģ�������Ȼ���Ա��������ć��ϡ�
��(d��ng)�����_(t��i)�oֹ�r(sh��)�����̎���i�o��B(t��i)����ˣ���݆�ײ���ݗ�䷽���b��8��(du��)�A�o�ߣ����ڵ����Ͼ���ͬ�Ӕ�(sh��)����СҺ���ס���(d��ng)СҺ������ǻ��ͨ�����͕r(sh��)�������㉺������_�A�o�ߣ����A�o݆���ڹ����_(t��i)��Ҫ���D(zhu��n)�r(sh��)����ʹСҺ������ǻ��ͨ����·���ڏ��ɵ������£����̧�𣬊A�o�ߌ�݆���_��
���D(zhu��n)�����_(t��i)�Č�(d��o)܉���ɴ��͝L��(d��ng)�S��֧�У����ɈA�F�L���S�м��p�����ĈA���L���S�б��֜�(zh��n)�_�Ļ��D(zhu��n)���ġ���(sh��)�ػ��D(zhu��n)�����_(t��i)�Ķ�λ������Ҫȡ�Q���U���Ă���(d��ng)���ȣ������횲��ø߾����U�����ڰ��]�h(hu��n)����ϵ�y(t��ng)�У������ڌ�(sh��)�H�y(c��)�������_(t��i)�o�B(t��i)��λ�`��֮�_����Ҫ�a(b��)���Ƕȵ�λ�ú��a(b��)��?sh��)�ֵ��ӛ�����a(b��)����·�У��ɔ�(sh��)���b���M(j��n)���`���a(b��)������ȫ�]�h(hu��n)����ϵ�y(t��ng)�У��ɸ߾��ȵĈA��Űl(f��)�������_(t��i)���_��λ��̖(h��o)�������o��(sh��)���b���M(j��n)�п��ơ�
���D(zhu��n)�����_(t��i)�O(sh��)�����c(di��n)����(d��ng)���������\(y��n)��(d��ng)�r(sh��)�����Ó��F������λ�_�P(gu��n)��ʹ�����_(t��i)���٣�Ȼ���ɈA��Ża���l(f��)����λ��̖(h��o)��ʹ�����_(t��i)��(zh��n)�_��ͣ����λ����(sh��)�ػ��D(zhu��n)�����_(t��i)����������ǶȵĻ��D(zhu��n)�ͷֶȣ�Ҳ�������B�m(x��)���D(zhu��n)�M(j��n)�o�\(y��n)��(d��ng)��
1.2 �O(sh��)Ӌ(j��)��(zh��n)�t�҂����O(sh��)Ӌ(j��)�^���У��������חl�O(sh��)Ӌ(j��)��(zh��n)�t
1.�ڴ_���O(sh��)�����w�����r(sh��)�����˿��]���g(sh��)�ԡ���(j��ng)��(j��)�ԡ��w�e����������늵��⣬�ɿ���������Ҫ���]����Ҫ���ء��ڝM���w�e����������늵��ڔ�(sh��)�l���£���횴_���Կɿ��ԡ����g(sh��)���M(j��n)�Լ���(j��ng)��(j��)�Ԟ��(zh��n)�t����ј�(g��u)�����w������
2.�ڷ���Փ�C�r(sh��)��һ��Ҫ�M(j��n)�пɿ���Փ�C��
3.�ڴ_���a(ch��n)Ʒ���g(sh��)ָ��(bi��o)��ͬ�r(sh��)����(y��ng)����(j��)��Ҫ�͌�(sh��)�F(xi��n)���ܴ_���ɿ���ָ��(bi��o)�c�S����ָ��(bi��o)��
4.��(du��)��Ͷ��ʹ�õ���ͬ�������ƣ��Įa(ch��n)Ʒ��������F(xi��n)��(ch��ng)�ɿ���ָ��(bi��o)���S����ָ��(bi��o)����(du��)�@�ɷN���(bi��o)��Ӱ����أ��Դ_����߮�(d��ng)ǰ���Ʈa(ch��n)�ɿ��Ե���Ч��ʩ��
5.��(y��ng)��(du��)�ɿ���ָ��(bi��o)�;S����ָ��(bi��o)�M(j��n)�к������䣬���_��ϵ�y(t��ng)����֙C(j��)������Ҋ������Ԫ�����ĵĿɿ���ָ��(bi��o)��
6.������C(j��)��Ԫ��������Ҫ���x�Ü�(zh��n)�t���MӆԪ������(y��u)�x�փ�(c��)������Σ�
8.�ڝM�㼼�g(sh��)��Ҫ�����r�£��M����(ji��n)���������·�O(sh��)Ӌ(j��)�ͽY(ji��)��(g��u)�O(sh��)Ӌ(j��) ���p�����C(j��)Ԫ������(sh��)�����C(j��)е�Y(ji��)��(g��u)�����
9.�M����(sh��)ʩϵ�л��O(sh��)Ӌ(j��)����ԭ�еij���a(ch��n)Ʒ���U(ku��)չ���]��ϵ�У���һ��(g��)��̖(h��o)�ϲ��ܲ����^����¼��g(sh��)�������¼��g(sh��)Ҫ���]�^���ԡ�
1.3 ��Ҫ���g(sh��)����(sh��)��1�������D(zhu��n)�돽��80 mm
��2�������_(t��i)ݔ�����ȣ�2 mrad
��3�������d����10�K
(4) �߂����i����
1.4 ����С�Y(ji��)��Ҫ��(ji��n)�ν�B���I(y��)�O(sh��)Ӌ(j��)�}Ŀ����(sh��)�ػ��D(zhu��n)�����_(t��i)������l(f��)չ�śr���O(sh��)Ӌ(j��)����������ԭ�����O(sh��)Ӌ(j��)����(sh��)Ҳ�����M(j��n)һ�����f����
- ��(sh��)�ػ��D(zhu��n)�����_(t��i)�IJ���ԭ�����Y(ji��)��(g��u)�O(sh��)Ӌ(j��)
2.1 ���M(j��n)늙C(j��)��ԭ�����M(j��n)늙C(j��)��һ�N�܌���(sh��)��ݔ���}�_�D(zhu��n)�Q�����D(zhu��n)��ֱ�������\(y��n)��(d��ng)��늴ň�(zh��)��Ԫ����ÿݔ��һ��(g��)�}�_늙C(j��)�D(zhu��n)�S���M(j��n)һ��(g��)�����������늙C(j��)���Ļ��D(zhu��n)���cݔ���}�_��(sh��)��������������(y��ng)���D(zhu��n)��ȡ�Q��ݔ���}�_�l�ʡ�
���M(j��n)늙C(j��)�ǙC(j��)�һ�w���a(ch��n)Ʒ���P(gu��n)�I����֮һ��ͨ����������λ���ƺͶ��ٿ��ơ����M(j��n)늙C(j��)�T���͡���λ���ȸߡ��o�۷e�`����ƺ�(ji��n)�ε����c(di��n)���V����(y��ng)���ڙC(j��)�һ�w���a(ch��n)Ʒ�У��磺��(sh��)�ؙC(j��)�������b�C(j��)е��Ӌ(j��)��C(j��)����O(sh��)�䡢��(f��)ӡ�C(j��)������C(j��)�ȡ�
�x���M(j��n)늙C(j��)�r(sh��)������Ҫ���C���M(j��n)늙C(j��)��ݔ�����ʴ���ؓ(f��)�d����Ĺ��ʡ������x�ù��ʲ��M(j��n)늙C(j��)�r(sh��)������ҪӋ(j��)��C(j��)еϵ�y(t��ng)��ؓ(f��)�d�D(zhu��n)�أ�늙C(j��)�ľ��l�����ܝM��C(j��)еؓ(f��)�d����һ�����������C���\(y��n)�пɿ����ڌ�(sh��)�H�����^���У����N�l���µ�ؓ(f��)�d���ر���ھ��l���������ķ�����(n��i)��һ����f����o����Mjmax���늙C(j��)��ؓ(f��)�d���ش�
�x���M(j��n)늙C(j��)�r(sh��)����(y��ng)ʹ����Ǻ͙C(j��)еϵ�y(t��ng)ƥ�䣬�@�ӿ��Եõ��C(j��)��������}�_��(d��ng)�����ڙC(j��)е����(d��ng)�^���О���ʹ���и�С���}�_��(d��ng)����һ�ǿ��Ը�׃�z�U�Č�(d��o)�̣����ǿ���ͨ�^���M(j��n)늙C(j��)�ļ�(x��)���(q��)��(d��ng)����ɡ�����(x��)��ֻ�ܸ�׃��ֱ��ʣ�����׃�侫�ȡ���������늙C(j��)�Ĺ����������Q����
�x���ʲ��M(j��n)늙C(j��)�r(sh��)����(y��ng)��(d��ng)����C(j��)еؓ(f��)�d��ؓ(f��)�d�T���͙C(j��)��Ҫ��Ć���(d��ng)�l�ʣ�ʹ֮�c���M(j��n)늙C(j��)�đT���l��������ƥ��߀��һ����������ʹ֮������B�m(x��)�����l���ܝM��C(j��)�������Ƅ�(d��ng)����Ҫ��
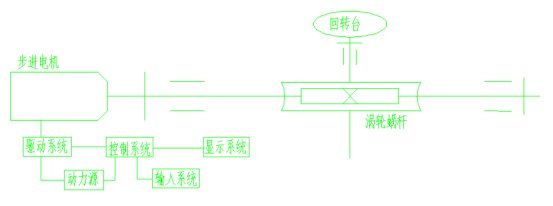
2.2 ����(d��ng)����?j��ng)��?d��ng)�r(sh��)��(y��ng)�M���Ҫ����(sh��)�ػ��D(zhu��n)�����_(t��i)һ����ԭ��(d��ng)�C(j��)������(d��ng)�b�ú����_(t��i)�M�ɣ�����(d��ng)�b����ԭ��(d��ng)�C(j��)�����_(t��i)֮�g���f�\(y��n)��(d��ng)�̈́�(d��ng)�������Ɍ�(sh��)�F(xi��n)�ֶ��\(y��n)��(d��ng)���ڱ��n�}�У�ԭ��(d��ng)�C(j��)���ò��M(j��n)늙C(j��)�������_(t��i)��T�β۹����_(t��i)������(d��ng)�b�����X݆����(d��ng)���U����(d��ng)�M�ɡ�
�����Ă���(d��ng)������Ҫ�M������Ҫ��
��1���C(j��)е�Ĺ���Ҫ��(y��ng)�M�㹤���_(t��i)�Ĺ��ʡ��D(zhu��n)�ٺ��\(y��n)��(d��ng)��ʽ��Ҫ��
��2�������l����Ҫ�����繤���h(hu��n)������(ch��ng)�ء������ƶȵȡ�
��3����������Ҫ���C�����ɿ�������(d��ng)Ч�ʸߵȡ�
(4���Y(ji��)��(g��u)��ˇ��Ҫ����Y(ji��)��(g��u)��(ji��n)�Ρ��ߴ�o����ʹ�þS�o(h��)��������ˇ�Ժͽ�(j��ng)��(j��)�����ȡ�
�D 1���w�O(sh��)Ӌ(j��)��(ji��n)�D
2.3��(sh��)�ػ��D(zhu��n)�����_(t��i)���ܵČ�(sh��)�F(xi��n)1���C(j��)е����
����݆�U�p�٣�݆�e����(d��ng)ƽ��(w��n)������(d��ng)�ȴ������_(t��i)�D(zhu��n)���^�ͣ����l(f��)���^�p���U�c늙C(j��)���B��݆�c���D(zhu��n)�_(t��i)���B��
���ò��M(j��n)늙C(j��)�(q��)��(d��ng)���x���m��(d��ng)?sh��)IJ�����c����(d��ng)�ȱ���_(d��)���ֱ���Ҫ��
2��늚ⲿ��
���Ì��íh(hu��n)�η�������(j��ng)���ʷŴ��·�(q��)��(d��ng)���M(j��n)늙C(j��)��
���Æ�Ƭ�C(j��)���ƭh(hu��n)�η��������������@ʾϵ�y(t��ng)�@ʾ�������
�����I�Pݔ����������Ƭ�C(j��)�M(j��n)���@ʾ��̎����
2.4 ���M(j��n)늙C(j��)���x���C(j��)еϵ�y(t��ng)�O(sh��)Ӌ(j��)�S���C(j��)е�ӹ���Ҫ���M(j��n)�o��Ҫ��(sh��)�F(xi��n)���M(j��n)�o�����M(j��n)늙C(j��)��ֱ���ŷ������ŷ�늙C(j��)���������(q��)��(d��ng)Ԫ������(du��)�ں���ߣ����ʹ�þ��ܵĂ���������(g��u)���]�h(hu��n)ϵ�y(t��ng)�����܌�(sh��)�F(xi��n)���M(j��n)�o�����]�h(hu��n)ϵ�y(t��ng)�У��V�����ò��M(j��n)늙C(j��)�R�_(d��)�����(zh��)�І�Ԫ���@����?y��n)鲽�M(j��n)늙C(j��)�R�_(d��)��������(y��u)�c(di��n)��
��1��ֱ�Ӳ��Ô�(sh��)�����M(j��n)�п���;
��2���D(zhu��n)��(d��ng)�T��С������(d��ng)��ֹͣ���㣻
��3���ɱ��ͣ�
��4���o�`��e�ۣ�
��5�����(zh��n)�_��
��6�����l�����Ա��^�ã�
��7���{(di��o)�ٷ����^����
���ò��M(j��n)늙C(j��)���(q��)��(d��ng)��Ԫ����C(j��)��(g��u)Ҳ���^��(ji��n)�Ρ�ͨ�����M(j��n)늙C(j��)ÿ��һ��(g��)�}�_�D(zhu��n)�^һ��(g��)�}�_��(d��ng)�������������}�_��(d��ng)��һ���^����0.01mm���ڔ�(sh��)��ϵ�y(t��ng)�О��˱��C�ӹ����ȣ��V�����ò��M(j��n)늙C(j��)�ļ�(x��)���(q��)��(d��ng)���g(sh��)��
1�����M(j��n)늙C(j��)���x��
���չ���Ҫ��͗l���xYϵ��һ����;��ȫ���]��������\�����ஐ��늙C(j��)��
���x늄�(d��ng)�C(j��)�����1.5�㣬�����x늄�(d��ng)�C(j��)�IJ���Ǻ��΄�(w��)����Ҫ��ľ��ȿɵÂ���(d��ng)��i=

���΄�(w��)��Ҫ��ֱ��ʞ�2mrad��
���M(j��n)늄�(d��ng)�C(j��)���x�ã�
����(d��ng)��(d��o)܉����Ħ��ϵ��(sh��)�O(sh��)��f=0.005����(d��o)܉�돽��80mm�������d����10kg���t�����_(t��i)���ܵ�����D(zhu��n)��

=98*0.005*80*10-3=0.0392���������ڜu݆�ϵ��D(zhu��n)��

=0.0392���U�u݆�p�������D(zhu��n)�طŴ����ã��ݗU�����ܵ��D(zhu��n)��

=0.003�����Բ��M(j��n)늙C(j��)�o�D(zhu��n)�ز��ɵ������������ϔ�(sh��)��(j��)�x�ĵIJ��M(j��n)늙C(j��)���±���ʾ��
| | | | ���d����(d��ng)�l�� /(��/s) | | |
| | | | | | |
���M(j��n)늄�(d��ng)�C(j��)�D(zhu��n)��

(r/min);���鲽��ǣ�1.5�㣩
f��ͨ��l��ȡf=625��
Ӌ(j��)��n=156.25��r/min����
2���C(j��)е�O(sh��)Ӌ(j��)
�U����(d��ng)�O(sh��)Ӌ(j��)У��
����(j��)GB/T10086-1988�����]�����Ýu�_���U��ZI��
�x����ϣ��U��45̖(h��o)䓣������X����Ӳ�Ȟ�45-55HRC���u݆�XȦ���T�a�����~��݆о�û��T�F��
1.���X����|ƣ�ڏ�(qi��ng)���M(j��n)���O(sh��)Ӌ(j��)��
����(d��ng)���ľ�

.
1���_�������ڜu݆�ϵ��D(zhu��n)��T2
����(d��ng)��(d��o)܉����(d��ng)Ħ��ϵ��(sh��)f=0.005����(d��o)܉�돽��50mm������S���d�ɞ�
Fmax��98N���t�����_(t��i)��������D(zhu��n)��Tm��400*0.005*50*10-3
= 0.02 N��m���������ڜu݆�ϵ��D(zhu��n)��T2��20 N��m
2���_���d��ϵ��(sh��)K
�������^��(w��n)������ȡ�d�ɷֲ�������ϵ��(sh��)K�£�1���ɱ��xȡʹ��ϵ��(sh��)KA��1�������D(zhu��n)�ٲ��ߣ���ȡ��(d��ng)�dϵ��(sh��)Kv��1���t
K= K��*KA*Kv=1*1*1=1
3���_������Ӱ�ϵ��(sh��)Z
���x�õ����T�a�����~݆����U���䣬��ZE��160MPa2
4���_�����|ϵ��(sh��)Z��
�ȼ��O(sh��)݆�ֶȈAֱ��d1�͂���(d��ng)���ľ�a�ı�ֵd1��a��0.35���ĈD�пɲ��
Z�ѣ�2.9
5���_���S�ý��|��(y��ng)��[��H]
����(j��)݆���Ϟ��T�a������~ZCuSn10P1������ģ�T�죬�U�����X��Ӳ�ȣ�45HRC���ɏı��в���U�Ļ����S�Ñ�(y��ng)��[��H]����268Mpa��
��(y��ng)��ѭ�h(hu��n)�Δ�(sh��)N��6jn2Lh��60*1*

*10000��6.7*10^6
����ϵ��(sh��)KHN=

=1.05
�t[��H]��KHN*[��H]���� 1.05*268Mpa��281.78Mpa
6��Ӌ(j��)�����ľ�
a��

mm= 4.73mm
ȡ���ľ�a=50mm����i=14���ʏı�ȡģ��(sh��)m��1.6mm���U�ֶȈAֱ��d1��20mm���@�r(sh��)d1��a=0��4���ĈD�пɲ�ý��|ϵ��(sh��)Z�ѡ�=2.74����?y��n)�Z�ѡ��� Z��������ϽY(ji��)�����á�
2.�U�c݆����Ҫ����(sh��)�c�γߴ�
1���U
�U�^��(sh��)Z1��2���S���X��Pa����m��5.027��ֱ��ϵ��(sh��)q=12��5���X픈Aֱ��
da��23.2mm(ha*��1��c*��0��2�����X���Aֱ��dn��16.16���ֶȈA��(d��o)�̽ǣ�9��05��25�����U�S���X��Sa��2.5133mm
2��݆
݆�X��(sh��)Z2��51��׃λϵ��(sh��)x2����0��5
�(y��n)�����(d��ng)��i��

��

������(d��ng)�ȴ�����͂���(d��ng)��14������ǿ��Եģ�
݆�ֶȈAֱ��d2��mz2��1.6*51mm��81.6 mm
�u݆��Aֱ��da2=d2��2ha2���� ��2*0.8����83.2 mm
�u݆�X���Aֱ��df2��d2��2hf2���� -2*2.72��mm�� 76.16mm
�u݆�ʺ�ĸ�A�돽rg2=a-

da2��8.4mm
3.У���X������ƣ�ڏ�(qi��ng)��
��F=

YFa2Y��
��(d��ng)���X��(sh��)ZV2��

=52.97
����(j��)X2����0��5��ZV2��52.97 ���ĈD�пɲ���X��ϵ��(sh��)YFa2��2.73��
������ϵ��(sh��)Y�£�1��

��1��9.09��/140 ��0.9351
�S������(y��ng)��[��F]��[��F]��KFN
�ı��пɲ�� ACuSn10P1����݆�Ļ����S�Ï�����(y��ng)��[��F]��=56MPA
����ϵ��(sh��)KFN��

=
[��F]=56*0.832Mpa=46.592 Mpa
��F=

*2.73*0.9351=0.239Mpa
������(qi��ng)���ǝM��ġ�
4.���ȵȼ�(j��)����ͱ���ֶȵĴ_��
���]�����O(sh��)Ӌ(j��)���U����(d��ng)�DŽ�(d��ng)������(d��ng)������ͨ�ÙC(j��)е�p��������
GB��T10089-1988�A���U���u݆�������x��8��(j��)���ȣ���(c��)϶�N�f����(bi��o)ע
��8fGB��T10089-1988��Ȼ�������P(gu��n)�փ�(c��)���Ҫ��Ĺ����(xi��ng)Ŀ������ֲڶȣ�
��̎���ԡ�
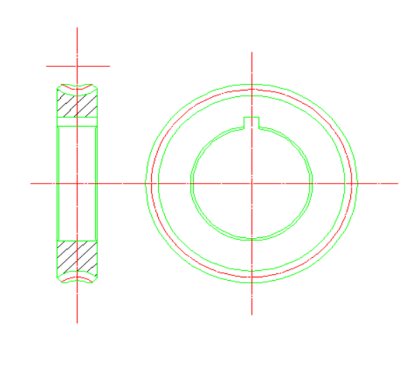
5.݆�U����D
2.5�S�е��x���L��(d��ng)�S���ǬF(xi��n)���C(j��)���ЏV����(y��ng)�õIJ���֮һ������������ҪԪ���ĝL��(d��ng)���|��֧���D(zhu��n)��(d��ng)����ġ��c����(d��ng)�S����ȣ��L��(d��ng)�S��Ħ����С�����������٣�����(d��ng)���ȃ�(y��u)�c(di��n)�����ҳ��õĝL��(d��ng)�S�н^�����(sh��)�ѽ�(j��ng)��(bi��o)��(zh��n)�������ʹ�ÝL��(d��ng)�S�Еr(sh��)��ֻҪ����(j��)���w�����l��
���_�x���S�е���ͺͳߴ硣�(y��n)���S�еij��d�������Լ��c�S�еİ��b���{(di��o)������(r��n)�����ܷ�����P(gu��n)�ġ��S���b���O(sh��)Ӌ(j��)�����}��
2.6 �S�е���϶���S��������{(di��o)���S�е���϶�����o�r(sh��)�����w�µĉ|Ƭ���{(di��o)���ģ��@�ӱ��^���㡣
2.7 �L��(d��ng)�S�е�����L��(d��ng)�S���ǘ�(bi��o)��(zh��n)������ʹ�S�б��ڻ��Q�ʹ������a(ch��n)���S�Ѓ�(n��i)�����S����ϲ��û����ƣ������S�Ѓ�(n��i)�ijߴ�����(zh��n)���S���⏽�c�⚤����ϲ��û��S�ƣ������S�е��⏽�ߴ�����(zh��n)��
2.8 �L��(d��ng)�S�еĝ�(r��n)�����]��늄�(d��ng)���ܹ����r(sh��)�D(zhu��n)�ٺܸߣ������Dz��g������ض�Ҳ�ܸߡ��ʲ����͝�(r��n)�����D(zhu��n)��Խ�ߣ���(y��ng)����ճ��Խ�͵ĝ�(r��n)���ͣ��d��Խ��(y��ng)�x��ճ��Խ�ߵġ�
- �������(q��)��(d��ng)ϵ�y(t��ng)�O(sh��)Ӌ(j��)
3.1 ϵ�y(t��ng)�����O(sh��)Ӌ(j��)��(g��u)��- ����ϵ�y(t��ng)��(y��ng)�M��ėl��
- ���I�Pݔ������@ʾ���@ʾ����ֱ�^���Єe�Ƿ�ݔ����(du��)��
- �Џ�(f��)λ���I����������ݔ�룬�������D(zhu��n)��
- ���D(zhu��n)�����_(t��i)�����B�m(x��)���D(zhu��n)�������D(zhu��n)�������淽��
- ����ϵ�y(t��ng)���O(sh��)Ӌ(j��)

0.png (4.87 KB, ���d��(sh��): 37)
���d����
2018-7-19 04:28 �ς�
���I�P�����ݔ����λ��(sh��)�֣�
��һλ���\(y��n)�з���1���������\(y��n)�У���0���������\(y��n)�У�����18H��
�ڶ�λ���\(y��n)��ģʽ����0�����B�m(x��)�\(y��n)��ģʽ����1���鶨�Ƕ��\(y��n)��ģʽ������19H
����λ���\(y��n)�нǶȰ�λ��(sh��)�����B�m(x��)�\(y��n)��ģʽ�r(sh��)��λ�oЧ���ڶ��Ƕ��\(y��n)��ģʽ�r(sh��)��λ����100�������D(zhu��n)�Ȕ�(sh��)������1AH;
����λ���\(y��n)�нǶ�ʮλ��(sh��)�����B�m(x��)�\(y��n)��ģʽ�r(sh��)��λ�oЧ���ڶ��Ƕ��\(y��n)��ģʽ�r(sh��)��λ����10�������D(zhu��n)�Ȕ�(sh��)������1BH��
����λ���\(y��n)�нǶȂ�(g��)λ��(sh��)�����B�m(x��)�\(y��n)��ģʽ�r(sh��)��λ�oЧ���ڶ��Ƕ��\(y��n)��ģʽ�r(sh��)��λ����1�������D(zhu��n)�Ȕ�(sh��)������1CH��
��λ��(sh��)��ݔ�����ݔ�딵(sh��)�֛]�����x�������\(y��n)���I����17Hλ��01H���@ʾ����z�y(c��)��17H��01H�r(sh��)�����D(zhu��n)�\(y��n)�г���
LED��(sh��)�a�������@ʾݔ��Ĕ�(sh��)��(j��)��߅ݔ��߅�@ʾ����(sh��)ֵݔ������¡��\(y��n)���I�����@ʾ����z�y(c��)��17H��01H��ֹͣ�@ʾ�����D(zhu��n)�\(y��n)�г����\(y��n)�г���̎�픵(sh��)��(j��)��Ƭ�C(j��)�l(f��)��������̖(h��o)�cCP�}�_��̖(h��o)�����ƭh(hu��n)�η��������h(hu��n)�η�����ݔ������������̖(h��o)���ڽ�(j��ng)�^���ʷŴ��·�(q��)��(d��ng)���M(j��n)늙C(j��)���κΕr(sh��)���¡���(f��)λ���I��������^��(zh��)�У���������ݔ�롣
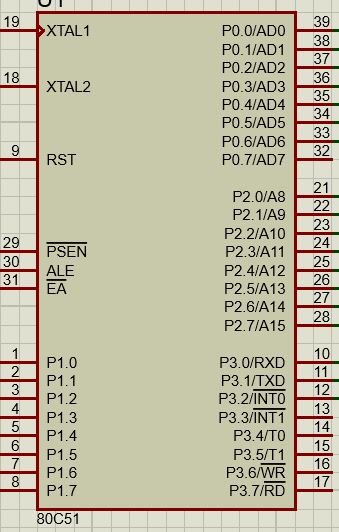
������Ǻ�(f��)�s��I/O�B�Ӕ�(sh��)�a���c�h(hu��n)�η������Լ��B���I�P�·������Ҫ̫��I/O�ڣ����x��80C51��Ƭ�C(j��)��12MHZ��ʎ����
�D2 80c51
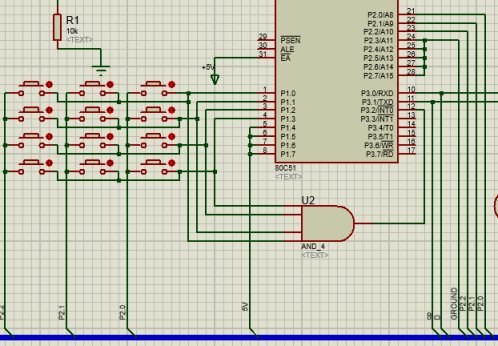
�ɻ��D(zhu��n)�����_(t��i)��Ҫ���I�P��(y��ng)��11��(g��)�I�����а�����0����9�����\(y��n)���I���Լ���(f��)λ�I���������������Д�ʽ�I�P��
�I�P�·���D;
��D��ʾ��p1.0��p1.3�c�I�P�о��B�ӣ��I�P�о�ͨ�^�c�T�cINTO�B�ӣ���ʼ���r(sh��)p1�ڌ�1��p2�ڌ�0�����I�]�ϕr(sh��)��INTO�ƽ�ɸ�׃�ͣ�푑�(y��ng)�Д࣬p1�ڵĸ��ƽ��p2�ڵĵ��ƽ���ͣ��˕r(sh��)p1�ڼ�����ֵ������p2��݆�����ƽ���z�y(c��)p1���ƽ����(d��ng)p1��ȫ����ƽ�r(sh��)���˕r(sh��)p2�ڼ�����ֵ����������ֵ�c��ֵ�Д���Iֵ������ָ��λ�á��I�P��������ꮅ�����I����ֵ�����£�
��Ƭ�C(j��)��ʼ�����c�I�P����������£�
- ORG 0000H
- AJMP CHUSHI
- ORG 0003H
- AJMP JPSM;�Д�0��ַ
- ORG 0100H
- CHUSHI: MOV SP,#4FH;�ї��^(q��)
- MOV TMOD,#00H;�ö��r(sh��)��
- SETB IT0;INT0�}�_�_�|�l(f��)��ʽ
- MOV R0,#18H;��(sh��)��(j��)�����ַ
- MOV R1,#00H;����@ʾλ��(sh��)
- MOV 17H,#00H;�\(y��n)�И�(bi��o)־λ����
- MOV A,#0ffH;P1����1
- MOV P1,A
- MOV A,#00H
- MOV P2,A
- MOV IE,#81H;�_�Д�
- AJMP DISPLAY
- RETURN: RETI
- JPSM: CLR EA;���P�P�����ӳ����P(gu��n)�]���Д�
- XIAODOU: MOV A,#0FFH;�x�����������(d��ng)
- MOV P1,A
- MOV A,P1
- MOV R3, A
- LCALL D_10ms;����D_10ms�����Օr(sh��)�ӳ����ӕr(sh��)10ms
- MOV A,#0FFH
- MOV P1,A
- MOV A, P1
- CJNE A,03H,RETURN;�ɴνY(ji��)����һ�£��D(zhu��n) RETURN����ȄtR3�д����ֵ
- MOV R2,#01H
- SJMP LIEZHI_2
- LIEZHI_1: MOV A, R2
- RL A
- MOV R2,A
- LIEZHI_2: MOV A,R2
- MOV P2,A
- MOV A ,#0FFH
- MOV P1, A
- MOV A,P1
- MOV R4, A
- CJNE R4,#0FFH,LIEZHI_1;��ȄtR2�д����ֵ
- MOV A,#00H
- MOV P2,A
- HANG_1 : CJNE R3,#0FEH,HANG_2
- HANG_1_1 : CJNE R2,#01H,HANG_1_2
- MOV @R0, #09H
- INC R0
- SETB EA;�_�Д�
- RETI
- HANG_1_2: CJNE R2,#02H, RETURN
- MOV 17H,01H;���\(y��n)�И�(bi��o)־λ
- SETB EA;�_�Д�
- RETI
- HANG_2: CJNE R3 ,#0FDH,HANG_3
- HANG_2_1: CJNE R2,#01H,HANG_2_2
- MOV @R0, #06H
- INC R0
- SETB EA;�_�Д�
- RETI
- HANG_2_2: CJNE R2,#02H,HANG_2_3
- MOV @R0,#07H
- INC R0
- SETB EA;�_�Д�
- RETI
- HANG_2_3: CJNE R2,#04H,RETURN
- MOV @R0,#08H
- INC R0
- SETB EA;�_�Д�
- RETI
- HANG_3: CJNE R3, #0FBH, HANG_4
- HANG_3_1: CJNE R2,#01H,HANG_3_2
- MOV@R0,#03H
- INC R0
- SETB EA;�_�Д�
- RETI
- HANG_3_2: CJNE R2,#02H,HANG_3_3
- MOV @R0, #04H
- INC R0
- SETB EA;�_�Д�
- RETI
- HANG_3_3: CJNE R2, #04, RETURN
- MOV @R0, #05H
- INC R0
- SETB EA;�_�Д�
- RETI
- HANG_4: CJNE R3,#0F7H,RETURN_1
- HANG_4_1: CJNE R2,#01H,HANG_4_2
- MOV @R0, #00H
- INC R0
- SETB EA;�_�Д�
- RETI
- HANG_4_2: CJNE R2,#02H,HANG_4_3
- MOV @R0, #01H
- INC R0
- SETB EA;�_�Д�
- RETI
- HANG_4_3: CJNE R2,#04H,RETURN_1
- MOV @R0, #02H
- INC R0
- SETB EA;�_�Д�
- RETI
- RETURN_1: RETI
����D-10ms���ӕr(sh��)�ӳ����ӕr(sh��)10ms��
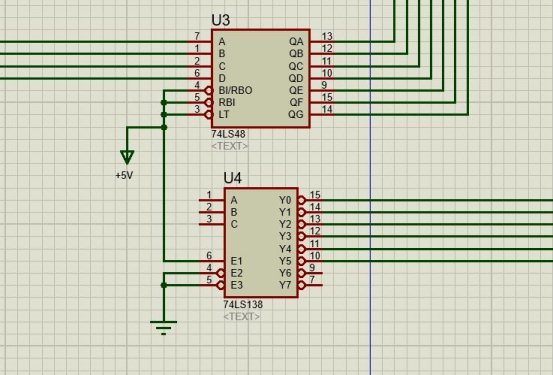
2���@ʾ�·���@ʾݔ�����λ��(sh��)��(j��)�������Ҫ�傀(g��)LED��(sh��)�a�ܣ��x��7SEG-MPX6-CC��ꎘO��(sh��)�a�ܣ�����ݔ����λ�a�c���δa���H�Æ�Ƭ�C(j��)�Ԏ�I/O�_���Dz���ģ��������74LS48�c74LS138��ǰ��ݔ�����δa������ݔ����λ�a��
�D 3 74LS48��74LS138
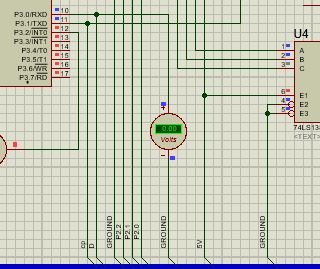
����E1�B��+5V늉���E1,E2�cE3�ӵأ�Y0~Y5�B��7SEG-MPX6-CC��λ�a����
��1��7SEG-MPX6-CC�·
�·�B�����D��ʾ
�D 4 7SEG-MPX6-CC
��2���@ʾ����
#18H��R1��#00H��R5����λ�a��
R1�Ƿ��R0���
R5�ĸ���λ���Q�cR1��ָ��(sh��)��(j��)���P0��
�ӕr(sh��)10ms
R1�Լ�14
R5�Լ�1
DISPLAY: MOV A,17H
JNZ YUNXING
MOV R5, #00H;��λ�a
MOV R1, #18H
XIANSHI: MOV A,R1
CJNE A ,00H, XUNHUAN
AJMP DISPLAY
XUNHUAN: CJNE A,#1DH, XUNHUAN_1
AJMP DISPLAY
XUNHUAN_1: MOV A,@R1
MOV R7, A;R7�ĵ���λ�����δa������λ�����δa
MOV A, R5
SWAP A
ORL A,R7
MOV P0,A
LCALL D_10ms
INC R5
INC R1
AJMP XIANSHI
3���\(y��n)���
��Ƭ�C(j��)ݔ��CP�}�_�l�ʣ�
ʹ�ö��r(sh��)��0���T��λGATE��0�����\(y��n)�п���λTR0����(d��ng)���r(sh��)����C/Tλ��0�����ö��r(sh��)������ʽ��M1M0=00�����r(sh��)������0��ʽ��ET0��0����ֹ���r(sh��)/Ӌ(j��)��(sh��)�Д࣬CH250��CP�}�_�l����ǰ������(y��ng)��625HZ,�̶��r(sh��)�������r(sh��)�g��(y��ng)��
1/625*2s=800us
(2^13-x)*1/2*12us=800us
�M(j��n)���D(zhu��n)�Q: x=2^13-800=7392=1110011100000B
����TH0����0E7H��TLO����00H
��1��ģʽ0���B�m(x��)���D(zhu��n)ģʽ
�������£�
YUNXING: CLR EA;��ֹ�Д�
MOV A,18H;18H�д�ŷ����(bi��o)־λ
CJNE A, #00H, FX_1;18H����0�t�D(zhu��n)FX1
FX_0: CLR 00H
MOV C,00H;��CY��0
MOV P3.0,C;��CYֵ��P3��0��P3��0�B��CH250��CP��
AJMP YS
FX_1: CLR 01H
MOV C, 00H;��CY��1
MOV P3.0, C;��CYֵ��P3��0��P3��0�B��CH250��CP��
YS: MOV A,19H
CJNE A,#00H, MODEL_1;19H���飣00H�t��0ģʽ�������D(zhu��n)
MODEL_0: CLR P3.1
LOOP_1: CPL P3.1
CLR TF0;�嶨�r(sh��)��0�������(bi��o)־λ
MOV TH0, #0E7H;�ö��r(sh��)����ֵ
MOV TL0, #00H
SETB TR0;�_ʼ���r(sh��)
LOOP_2: JBC TF0, LOOP_1;������r(sh��)��0����D(zhu��n)LOOP1����t�^�m(x��)�m(x��)�z�y(c��)
AJMP LOOP_2
��2��ģʽ1�����Ƕ�ģʽ
i=51/2=25.5
�����_(t��i)�D(zhu��n)1��t���M(j��n)늙C(j��)���D(zhu��n)60�䣯��1.5���60/25.5��=17�����r(sh��)�����r(sh��)�ɴβ��M(j��n)늙C(j��)��һ��(g��)����ǣ����Զ��r(sh��)�����r(sh��)34�Σ������_(t��i)���D(zhu��n)1��������ڳ����ƣ�������֞������֣���һ���֞��λ���֣��ڶ����֞�ʮλ���֣��������֞邀(g��)λ���֡��@����(g��)������ǰ�������Έ�(zh��)�У����l(f��)������(sh��)Ŀ���}�_��ȫ����(zh��)��������l(f��)�}�_��(sh��)��Ӽ���ݔ��������Ҫ��ġ����γ���Y(ji��)��(g��u)��ͬ���F(xi��n)�H�Ͱ�λ�����M(j��n)��Ԕ��(x��)�f�����I�P��ݔ��Ļ��D(zhu��n)�ǶȰ�λ��(sh��)����100�ٳ���34���Ƕ��r(sh��)����(y��ng)����ĴΔ�(sh��)������ʹ��DINZָ��ʹ���r(sh��)������؏�(f��)�\(y��n)�����������Δ�(sh��)���������ɰ�λ��(sh��)�����}�_��(g��)��(sh��)Ҫ��ʮλ�����c��(g��)λ�����c��λ������ͬ��
�������£�
- MODEL_1: CLR P3.1
- MOV A, 1AH
- CJNE A, #00H, BAIWEI;��λ��(sh��)��0��������������D(zhu��n)ʮλ��(sh��)��0����t��λѭ�h(hu��n)
- AJMP SHIWEI_1
- BAIWEI: MOV 15H,#22H;��λѭ�h(hu��n)�����D(zhu��n)�����_(t��i)���D(zhu��n)1�Ȍ�(du��)��(y��ng)���r(sh��)������Δ�(sh��)34=22H
- LOOP1_2: MOV 12H, #64H
- LOOP1_1: MOV R1, 1AH;�����I�Pݔ��İ�λ�Ȕ�(sh��)�oR1
- LOOP1_3: CPL P3.1 ;��P3��1ݔ��CP�}�_
- CLR TF0
- MOV TH0, #0E7H
- MOV TL0, #00H
- SETB TR0
- LOOP1_4: JBC TF0, LOOP1_5;�z�y(c��)���r(sh��)��0�Ƿ����������t�D(zhu��n)L0OP1_5����t�^�m(x��)�z�y(c��)
- AJMP LOOP1_4
- LOOP1_5: DJNZ R1, LOOP1_3
- DJNZ 12H,LOOP1_1
- DJNZ 15H,LOOP1_2
- SHIWEI_1: MOV A, 1BH ;ʮλѭ�h(hu��n)
- CJNE A, #00H, SHIWEI
- AJMP GEWEI_1
- SHIWEI: MOV 15H,#22H
- LOOP2_2: MOV 13H, #0AH
- LOOP2_1: MOV R2, 1BH
- LOOP2_3: CPL P3.1
- CLR TF0
- MOV TH0, #0E7H
- MOV TL0, #00H
- SETB TR0
- LOOP2_4: JBC TF0, LOOP2_5
- AJMP LOOP2_4
- LOOP2_5: DJNZ R2, LOOP2_3
- DJNZ 13H, LOOP2_1
- DJNZ 15H, LOOP2_2
- GEWEI_1: MOV A,1CH ;��(g��)λѭ�h(hu��n)
- CJNE A, #00H, GEWEI
- AJMP HERE
- GEWEI: MOV 15H, #22H
- LOOP3_2: MOV 14H, #01H
- LOOP3_1: MOV R3, 1CH
- LOOP3_3: CPL P3.1
- CLR TF0
- MOV TH0, #0E7H
- MOV TL0,#00H
- SETB TR0
- LOOP3_4: JBC TF0, LOOP3_5
- AJMP LOOP3_4
- LOOP3_5: DJNZ R3,LOOP3_3
- DJNZ 14H, LOOP3_1
- DJNZ 15H, LOOP3_2
- HERE: SJMP HERE
4���ӕr(sh��)�ӳ���
��ǰ��Ҫ���I�P�����c�@ʾ�������裬�ӕr(sh��)������Ҫ��10ms���ӕr(sh��)��ʹ
��12MHz��ʎ������һ��(g��)�C(j��)�����ڞ�1us��
�������£�
D_10ms: MOV11H#32H;1*1us
LOOP: MOV 10H,#63H;*50us
DJNZ 10H��$��2*99*50us��ԭ�����D(zhu��n)
DJNZ 11H��LOOP��2*50us����1��50��9900��100��us��10050us��10ms
RET
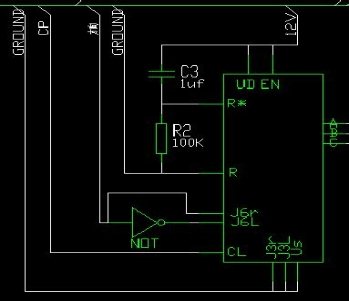
5���h(hu��n)�η������·
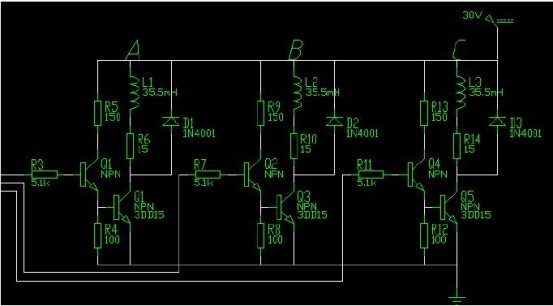
6�����ʷŴ��·
���Æ�늉����ʷŴ��·����D��ʾ��A��B��C�քe�鲽�M(j��n)늙C(j��)�����࣬ÿ����һ�M�Ŵ����(q��)��(d��ng)���Ŵ���ݔ����c�h(hu��n)���}�_���������B���ڛ]���}�_ݔ��r(sh��)��3DK4��3DD15���ʾ��w�ܾ���ֹ���@�M�Пo���ͨ�^��늄�(d��ng)�C(j��)���D(zhu��n)����(d��ng)A���늕r(sh��)��늄�(d��ng)�C(j��)�D(zhu��n)��(d��ng)һ������(d��ng)�}�_���μӵ���A��B��C����(g��)ݔ��˕r(sh��)�����M�Ŵ����քe�(q��)��(d��ng)��ͬ���@�M��ʹ늄�(d��ng)�C(j��)һ��һ���D(zhu��n)��(d��ng)���·�K���@�M��(li��n)�Ķ��O��VD���m(x��)�����ã�ӛ�d�����Źܽ�ֹ�r(sh��)��ʹ��(ch��)�����@�M�е�����ͨ�^���O���γ��m(x��)����·й�ţ��Ķ����o(h��)���Źܡ��c�@�MW��(li��n)�����R��������裬����ͨ�^�@�M��������³��^���~��ֵ������늄�(d��ng)�C(j��)�l(f��)�ᅖ�������ġ�R����ֵһ����5��2092������(n��i)�xȡ��
�·���D��
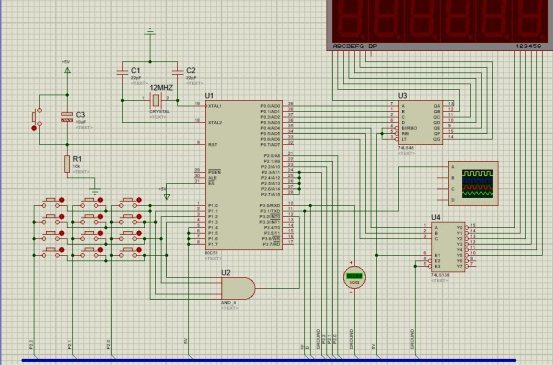
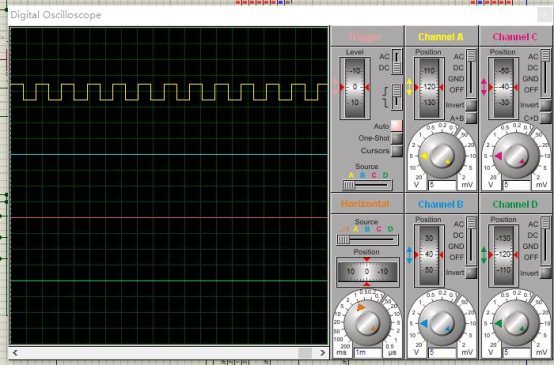
Protues��һ����Ԍ�(du��)���N�·�M(j��n)�з����ܛ���������(y��n)�C�·�B���c��������_�ԣ��F(xi��n)�����沽�E�c�Y(ji��)���������¡�
���淽������ǰ�����B���·����ܛ���]�Эh(hu��n)�η�����CH250���ʃH��(du��)��Ƭ�C(j��)�l(f��)���ķ�����̖(h��o)�c�}�_��̖(h��o)�M(j��n)�Йz�(y��n)�Ƿ�M��Ҫ����ǰ���������˝M�㹤���_(t��i)�Ļ��D(zhu��n)Ҫ���M(j��n)늙C(j��)�\(y��n)���l�ʞ�625����s���h(hu��n)�η�����ÿ�ӵ�һ��(g��)�����t��һ�ģ������Ƭ�C(j��)���}�_�l�ʑ�(y��ng)��625HZ������Ƭ�C(j��)�l(f��)�����}�_���ڑ�(y��ng)��1��625��1��6ms��늉���5V��
1����ǰ�������B�ӷ����·���� DEVICES��PICK���N�NԪ���������B��֮�����ʾ�����cP3��0��P3��1���B���·�D���£�
������늉����z�y(c��)����늉��Ƿ����_��ʾ������z�y(c��)�}�_�����Ƿ����_����Ƭ�C(j��)���������Keilܛ��ݔ�룬����(d��o)���ɞ�hex�ļ������ψD�Ć�Ƭ�C(j��)��(d��o)�룬���O(sh��)�� Clock Frequency��12MHz���c(di��n)�����水�o�_ʼ���档
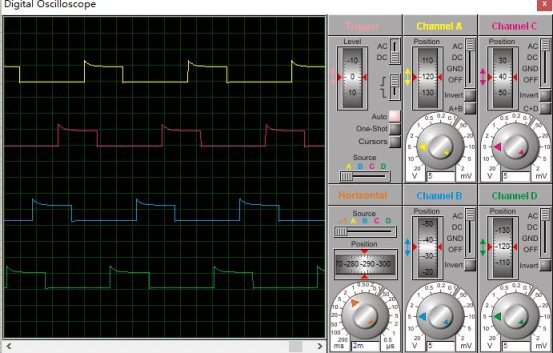
2����ָ�00000��ݔ�루������(g��)����Բ���ݔ�룬��?y��n)����B�m(x��)�\(y��n)�D(zhu��n)��ݔ��ݔ
��Կ��ԣ������¡��\(y��n)�С��I��ָ���ʾ�������B�m(x��)�\(y��n)�D(zhu��n)���\(y��n)�нY(ji��)�����D��ʾ��
���Y(ji��)�������ܵęC(j��)�һ�w���n���O(sh��)Ӌ(j��)���@��K�ڸ�һ�����ˣ������Լ���֪�R(sh��)���ޣ��@�ε��n���O(sh��)Ӌ(j��)�����˲��ن��}���ܶ�ط�Ҳ��Ƿȱ�����^�@��(g��)�^��߀��ʹ������˜\��ͨ�^�@�ε��n���O(sh��)Ӌ(j��)ʹ�Ҽ����ˌ�(du��)��Փ֪�R(sh��)�����⣬���Ҍ�(du��)��֮ǰ�Č�(sh��)��(x��)���n���O(sh��)Ӌ(j��)���˸���̵��J(r��n)�R(sh��)
�n���O(sh��)Ӌ(j��)���҂�?c��)����֮ǰ�Ľ̌W(xu��)Ӌ(j��)����Ҏ(gu��)����ȫ���n֮�C���\(y��n)�����W(xu��)�^��ȫ����Փ֪�R(sh��)�c��(sh��)�`��Y(ji��)�ϵČ�(sh��)�`�Ԕ�(sh��)�W(xu��)�h(hu��n)��(ji��)�������B(y��ng)�҂��M(j��n)�оC�Ϸ�������߽�Q��(sh��)�H���}���������Ķ��_(d��)��얹̣��U(ku��)������W(xu��)֪�R(sh��)��Ŀ�ģ������B(y��ng)�҂��{(di��o)���о���Ϥ���P(gu��n)���g(sh��)���ߣ��\(y��n)�Ç��Ҙ�(bi��o)��(zh��n)��Ҏ(gu��)�����փ�(c��)���D��(c��)�ȹ��ߕ����M(j��n)���O(sh��)Ӌ(j��)Ӌ(j��)�㣬��(sh��)��(j��)̎�����������g(sh��)�ļ��Ī�(d��)������������
ͨ�^�ҌW(xu��)���˺ܶ࣬���������J(r��n)�R(sh��)����Փ�͌�(sh��)�`��Y(ji��)�ϵ���Ҫ������얹������W(xu��)����Փ֪�R(sh��)�⣬߀�W(xu��)�����ٵ���֪�R(sh��)���·�����ͨ�^���ε��O(sh��)Ӌ(j��)ʹ�Ҍ�(du��)CAXA�������쾚���܉������Į�����Ƭ�C(j��)�Ӿ��D�D����
���_ʼ���@��(g��)�O(sh��)Ӌ(j��)�ĕr(sh��)����?gu��)��ǟo�����ֵ�.��ͬ�W(xu��)��ָ��(d��o)���Լ�������e(cu��)�`���������ҵ���һ���ķ���. ���^�����@��(g��)�O(sh��)Ӌ(j��)�ĕr(sh��)��߀�������˺ܶ����}�����ڿ����O(sh��)Ӌ(j��)�ĕr(sh��)��?q��)��Ӿ��D���O(sh��)Ӌ(j��)̎������(d��ng)���z©�˺ܶ��چ��}�ȵȡ��O(sh��)Ӌ(j��)���Ƴ���r(sh��),�z©���ӕr(sh��)����,�@Щ�e(cu��)�`�����˺��L(zh��ng)�ĕr(sh��)�L(zh��ng)�ĕr(sh��)�g������,�Һ�߀��������@���O(sh��)Ӌ(j��),ʹ�Լ���(du��)��(sh��)�ؙC(j��)���Ĺ����_(t��i)����һ�����J(r��n)�R(sh��),���Ҍ�(du��)������ĺܶ��C(j��)е����߀�Dz�̫��������,Ҫ�W(xu��)������������ղ��ٵ������I(l��ng)��?q��)W�Ƶ�֪�R(sh��)�����߀Ҫ����ĕr(sh��)�g��Ŭ�������ڱ����O(sh��)Ӌ(j��)�r(sh��)�g�̺�ˮƽ���ޣ����IJ���(x��)���y�����c(di��n)�e(cu��)�`��Ո(q��ng)��λ�x�����u(p��ng)ָ����
ͬ�r(sh��)���x�ώ�����(du��)�ҵ�Ϥ��ָ��(d��o)!





 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664










 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��