|
�@��һ��(g��)ֱ���ŷ�늙C(j��)����ϵ�y(t��ng)�O(sh��)Ӌ(j��) �д��a ����������І��} ���?gu��)�æ���?br />
�����Ϣ�c늚��ϵ
�n���O(sh��)Ӌ(j��)��(b��o)��
�O(sh��)Ӌ(j��)�}Ŀ�� ֱ���ŷ�늙C(j��)����ϵ�y(t��ng)�O(sh��)Ӌ(j��) ϵ �e�������Ϣ�c늚��ϵ �꼉(j��)���I(y��)�� �W(xu��) ̖(h��o)�� �W(xu��)�������� �Ԅ�(d��ng)�����I(y��)��Ӌ(j��)��C(j��)���Ƽ��g(sh��)���n���O(sh��)Ӌ(j��)�΄�(w��)�� | ֱ���ŷ�늙C(j��)����ϵ�y(t��ng)�O(sh��)Ӌ(j��) | |
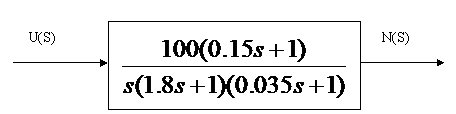
| | | | �O(sh��)Ӌ(j��)��(du��)����ֱ���ŷ�늙C(j��)��(sh��)�(y��n)�_(t��i)���O(sh��)Ӌ(j��)һ��(g��)Ӌ(j��)��C(j��)���Ƶ�ֱ���ŷ�늙C(j��)����ϵ�y(t��ng)���ɜy��Ԫ��(λ�Ƃ�����)��(du��)�����ƌ�(du��)��(늙C(j��))�ı�����(sh��)(λ��)�M(j��n)�Мy������׃�Q�l(f��)�͆�Ԫ(A/D�D(zhu��n)�Q��)��������(sh��)׃��һ����ʽ����̖(h��o) ���ͽo������CPU�����������y����̖(h��o)(��(sh��)�Hλ����)�c�o����̖(h��o)��λ�������M(j��n)�б��^�������`��t���A(y��)���Ŀ���Ҏ(gu��)�ɮa(ch��n)��һ������̖(h��o)�(q��)��(d��ng)��(zh��)�ЙC(j��)��(g��u)(�ŷ�늙C(j��)�����Դ)������ʹ������(sh��)(��(sh��)�Hλ����)�c�o����̖(h��o)��λ����������һ�¡���늙C(j��)λ���S��(d��ng)ϵ�y(t��ng)�� ���У�  =1.8��  =0.035��  =0.15��K =100�������㷨�x�Ô�(sh��)��PID���ơ� | | - PC�C(j��)һ�_(t��i)���̌W(xu��)��(sh��)�(y��n)��һ�_(t��i);
| Ӌ(j��)���W(xu��)����(sh��)���΄�(w��) | 3�� ��1�������_�n�}���ܡ� ��2�����я�(f��)�s���}�ֽ������ģ�K���_����ģ�K̎���������������̈D�� ��3�����惦(ch��)���YԴ���� ��4�������Ƴ�����(j��)���̈D������Դ���� ��5������(du��)�����M(j��n)�ЅR�����{(di��o)ԇ���ģ�ֱ�������\(y��n)�нY(ji��)�����_��ֹ�� | Ӌ(j��)���O(sh��)Ӌ(j��)�M(j��n)�� | - ���w�����O(sh��)Ӌ(j��)
- ����ϵ�y(t��ng)�Ľ�ģ�͔�(sh��)�ֿ������O(sh��)Ӌ(j��)
- Ӳ�����O(sh��)Ӌ(j��)�͌�(sh��)�F(xi��n)
- �x��Ӌ(j��)��C(j��)���L(�x�� 51��(n��i)�˵Ć�Ƭ�C(j��))
- �O(sh��)Ӌ(j��)֧��Ӌ(j��)��C(j��)����������·(EPROM��RAM��I/O�˿ڡ��I�P���@ʾ�ӿ��·��)��
- �O(sh��)Ӌ(j��)ݔ����̖(h��o)�ӿ��·��
- �O(sh��)Ӌ(j��)ݔ�������·��
- �������P(gu��n)�·���O(sh��)Ӌ(j��)��(�Դ��ͨ�ŵ�)��
- ����ϵ�y(t��ng)�YԴ������ϵ�y(t��ng)��ʼ����������ģ�K��D��
- ����A/D�D(zhu��n)�Q��λ�Ùz�y�ӳ����D��
- �������Ƴ����D/A�D(zhu��n)�Q�����ӳ���ģ�K��D��
- ��������ģ�K(�@ʾ�c�I�P��̎������)��D��
�塢�����n���O(sh��)Ӌ(j��)�f�������L��������ϵ�y(t��ng)�·�D(A3����)�� | | 1���ں��� Ӌ(j��)��C(j��)���Ƽ��g(sh��)[M] �������C(j��)е���I(y��)�����磬2007.6 2���ܺ��ٵ� ��Ӌ(j��)��C(j��)ԭ�����ӿڼ��g(sh��)[M]�Ϸʣ��Ї��Ƽ���W(xu��)������,2008.6 3������ ��Ƭ�C(j��)ԭ������(y��ng)�ü��g(sh��)[M]�������ߵȽ��������� 4����Ȼ�� 51ϵ�І�Ƭ�C(j��)�O(sh��)Ӌ(j��)��(sh��)��[M]�������������պ����W(xu��)������ 5��Ӌ(j��)��C(j��)���Ƽ��g(sh��)��(sh��)�(y��n)ָ��(d��o)�� |
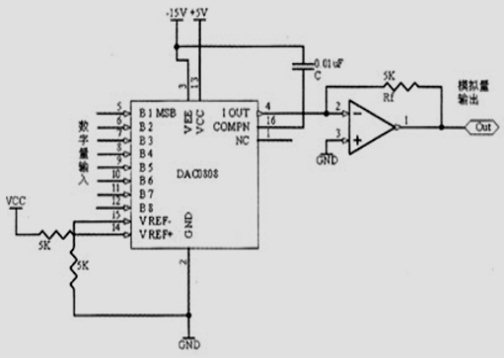
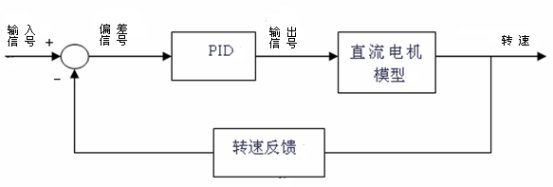
ժҪ �S�������·���g(sh��)���w�ٰl(f��)չ�����������ŷ�����ϵ�y(t��ng)�ձ鑪(y��ng)�ã��@�N��(sh��)���ŷ�ϵ�y(t��ng)�����ܿ��Դ���^ģ�M�ŷ�ϵ�y(t��ng)����(sh��)���ŷ�ϵ�y(t��ng)���Ԍ�(sh��)�F(xi��n)�߾��ȵ�λ�ÿ��ơ��ٶȸ�ۙ�������S��ظ�׃���Ʒ�ʽ����Ƭ�C(j��)��DSP���ŷ�늙C(j��)�����еõ��ˏV���ؑ�(y��ng)�ã��Æ�Ƭ�C(j��)����������Ĕ�(sh��)���ŷ�����ϵ�y(t��ng)�����w�eС���ɿ��Ըߡ���(j��ng)��(j��)�Ժõ����@��(y��u)�c(di��n)�������O(sh��)Ӌ(j��)�о���ֱ���ŷ�늙C(j��)����ϵ�y(t��ng)���Ԇ�Ƭ�C(j��)������IJ���,��Ҫ�dž�Ƭ�C(j��)����ƺ���ͨ�^ܛӲ���Y(ji��)�ϵķ�ʽ��(du��)ֱ���ŷ�늙C(j��)�D(zhu��n)�ٌ�(sh��)�F(xi��n)�_�h(hu��n)���ơ� ��(du��)���ŷ�늙C(j��)���]�h(hu��n)���ƣ�����PID���ƣ�����MATLABܛ����(du��)��λ�A�Sݔ��푑�(y��ng)��PIDУ����(d��ng)�B(t��i)ģ�M���棬�о�PID���������Լ�PID������(sh��)ֵ��(du��)����ϵ�y(t��ng)��Ӱ푣�ͨ�^ԇ�����õ����PID����(sh��)��ͬ�r(sh��)�ܸ���ȵ������� �Ԅ�(d��ng)�����I(l��ng)��(y��ng)�ØO��V����MATLABܛ���� Ŀ � 1.���� 2����Ƭ�C(j��)����ϵ�y(t��ng)Ӳ���M�� 2.1 ������ 2.2 DAC0808�D(zhu��n)�Q�� 2.3�\(y��n)��Ŵ��� 2.4���Iݔ����@ʾģ�K 2.4.1 ���Iݔ�� 2.4.2 �@ʾģ�K 2.5 ֱ���ŷ�늄�(d��ng)�C(j��) 3.��Ƭ�C(j��)����ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��) 3.1������ 3.2�I�P̎���ӳ��� 4.����ϵ�y(t��ng)ԭ��D������ 4.1����ϵ�y(t��ng)����D 4.2����ϵ�y(t��ng)�·ԭ��D 4.3 Proteus����Y(ji��)�� 5.Simulink�M����(du��)ֱ���ŷ�����ϵ�y(t��ng)�ķ��� 5.1 MATLAB�cSimulink���� 5.1.1 MATLAB���� 5.1.2 Simulink���� 5.2 ֱ���ŷ�늙C(j��)��(sh��)�W(xu��)ģ�� 5.3 ϵ�y(t��ng)Simulinkģ�ͼ��r(sh��)�����Է��� 5.3.1 �_�h(hu��n)ϵ�y(t��ng)Simulinkģ�ͼ����� 5.3.2 ��λؓ(f��)����ϵ�y(t��ng)Simulinkģ�ͼ����� 5.4 PIDУ�� 5.4.1 PID����(sh��)�Ĝ�ԇ���_�� 5.4.2 ����������У�� 5.4.3 �����e�ֿ�����У�� 5.4.4 PID������У�� 6��С�Y(ji��) �����īI(xi��n) ��� 1.�������O(sh��)Ӌ(j��)�Ć�Ƭ�C(j��)����ֱ���ŷ�늙C(j��)ϵ�y(t��ng)��һ��(g��)�_�h(hu��n)���Ԅ�(d��ng)����ϵ�y(t��ng)����ϵ�y(t��ng)�����Ԇ�Ƭ�C(j��)��������� ͨ�^���o�O(sh��)���O(sh��)��ֵݔ�뵽��Ƭ�C(j��)����Ƭ�C(j��)��(du��)ݔ����̖(h��o)̎����ݔ��������̖(h��o)����(j��ng)D��A�D(zhu��n)�Q��DAC0808�D(zhu��n)�Q��є�(sh��)����̖(h��o)�D(zhu��n)׃?y��u)�ģ�M늉����ٽ�(j��ng)�Ŵ����Ŵ��ȥ�����ŷ�늙C(j��)�������M(j��n)������늙C(j��)�����A(y��)�����D(zhu��n)���D(zhu��n)��(d��ng)��ͬ�r(sh��)��Ƭ�C(j��)̎���Ĕ�(sh��)����̖(h��o)ͨ�^LCD���@ʾ����(sh��)�r(sh��)�@ʾ��Ƭ�C(j��)���D(zhu��n)��ֵ�� ���Ȿ�O(sh��)Ӌ(j��)߀������MATLABܛ�������� Simulink��(g��u)��ֱ��늙C(j��)����ϵ�y(t��ng)ģ�ͣ�ͨ�^��(du��)����(g��)��Ԫ�����ą���(sh��)�M(j��n)���O(sh��)�����M(j��n)����(du��)ֱ���ŷ�늙C(j��)ϵ�y(t��ng)�����M(j��n)�з��棬������湦�܌�(du��)ϵ�y(t��ng)�M(j��n)�Еr(sh��)������� 2����Ƭ�C(j��)����ϵ�y(t��ng)Ӳ���M����ϵ�y(t��ng)����һƬ��Ƭ�C(j��)�����ʽ�I�P��DAC0808�D(zhu��n)�Q�����\(y��n)��Ŵ������@ʾģ�K��һ�_(t��i)ֱ���ŷ�늙C(j��)�M�ɣ�����ͨ�^Proteus7.4ܛ���M(j��n)�з��档 2.1 �������x��AT89C52��Ƭ�C(j��)�� AT89C52��51ϵ�І�Ƭ�C(j��)��һ��(g��)��̖(h��o)������ATMEL��˾���a(ch��n)�ġ� ����AT89C52��һ��(g��)��늉���������CMOS 8λ��Ƭ�C(j��)��Ƭ��(n��i)��8k bytes�Ŀɷ���(f��)������Flashֻ�x����惦(ch��)����256 bytes���S�C(j��)��ȡ��(sh��)��(j��)�惦(ch��)����RAM������������ATMEL��˾�ĸ��ܶȡ�����ʧ�Դ惦(ch��)���g(sh��)���a(ch��n)�����ݘ�(bi��o)��(zh��n)MCS-51ָ��ϵ�y(t��ng)��Ƭ��(n��i)��ͨ��8λ����̎������Flash�惦(ch��)��Ԫ������(qi��ng)���AT89C52��Ƭ�C(j��)�ɞ����ṩ�S���^��(f��)�sϵ�y(t��ng)���Ƒ�(y��ng)�È��ϡ�  ����AT89C52��40��(g��)���_��32��(g��)�ⲿ�p��ݔ��/ݔ����I/O���˿ڣ�ͬ�r(sh��)��(n��i)��2��(g��)���Д�ڣ�3��(g��)16λ�ɾ��̶��r(sh��)Ӌ(j��)��(sh��)��,2��(g��)ȫ�p������ͨ�ſڣ�2��(g��)�x���ھ���AT89C52�����ճ�Ҏ(gu��)�����M(j��n)�о���,���������ھ�����(Sϵ�еIJ�֧���ھ�����)���䌢ͨ�õ�̎������Flash�惦(ch��)���Y(ji��)����һ���e�ǿɷ���(f��)������Flash�惦(ch��)������Ч�ؽ����_�l(f��)�ɱ��� ����AT89C52��40��(g��)���_��32��(g��)�ⲿ�p��ݔ��/ݔ����I/O���˿ڣ�ͬ�r(sh��)��(n��i)��2��(g��)���Д�ڣ�3��(g��)16λ�ɾ��̶��r(sh��)Ӌ(j��)��(sh��)��,2��(g��)ȫ�p������ͨ�ſڣ�2��(g��)�x���ھ���AT89C52�����ճ�Ҏ(gu��)�����M(j��n)�о���,���������ھ�����(Sϵ�еIJ�֧���ھ�����)���䌢ͨ�õ�̎������Flash�惦(ch��)���Y(ji��)����һ���e�ǿɷ���(f��)������Flash�惦(ch��)������Ч�ؽ����_�l(f��)�ɱ�������AT89C52��PDIP��PQFP/TQFP��PLCC�����N���b��ʽ�����m��(y��ng)��ͬ�a(ch��n)Ʒ������ ��Ҫ�������ԣ� (1)����MCS51ָ��ϵ�y(t��ng),8k�ɷ���(f��)����(>1000�Σ�Flash ROM (2)32��(g��)�p��I/O��,256x8bit��(n��i)��RAM (3)3��(g��)16λ�ɾ��̶��r(sh��)/Ӌ(j��)��(sh��)���Д�,�r(sh��)��l��0-24MHz (4)2��(g��)�����Д�,�ɾ���UART����ͨ�� (5)2��(g��)�ⲿ�Д�Դ,��6��(g��)�Д�Դ (6)2��(g��)�x���Д�ھ�,3��(j��)����λ (7)���Ŀ��e�͵��ģʽ,ܛ���O(sh��)��˯�ߺ͆��ѹ��� �D2-1��AT89C52 2.2 DAC0808�D(zhu��n)�Q���O(sh��)Ӌ(j��)�в��õ�оƬ��DAC0808������һ��(g��)8λDAC���D2��DAC0808���͑�(y��ng)���·���D2-1��ݔ����ģ�M����һ��(g��)��늉�����(d��ng)��Ҫؓ(f��)늉��r(sh��)����DAC�ĵ�4���_ֱ�ӽ�һ��(g��)3K�����ҵ���輴�ɡ�DAC�ĵ�4���_�������������ģ������ֵ��1.992mA����(d��ng)���һ��(g��)3K����ؓ(f��)�d���RL�r(sh��)��ݔ����늉���ͨ�^RL�����ӵ�늉�������늉���-3K����1.922mA ��-6V(��(d��ng)����λݔ�붼�Ǹ��ƽ�ĕr(sh��)��)���c��(sh��)�(y��n)�еĔ�(sh��)��(j��)����ϡ���Ҫָ�����ǣ�ؓ(f��)�d���Ĵ�С��(hu��)Ӱ��D(zhu��n)�Q�r(sh��)�g����(d��ng)ؓ(f��)�d����2.5K���ĕr(sh��)������ĵ���r�£���(hu��)ʹ�D(zhu��n)�Q�r(sh��)�g����1.2��s��
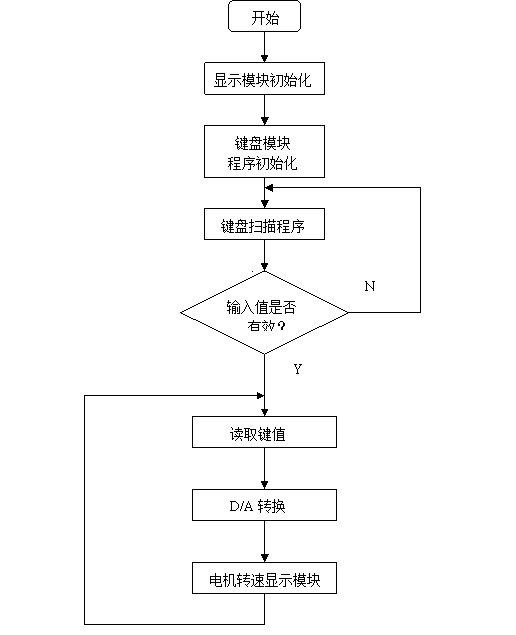
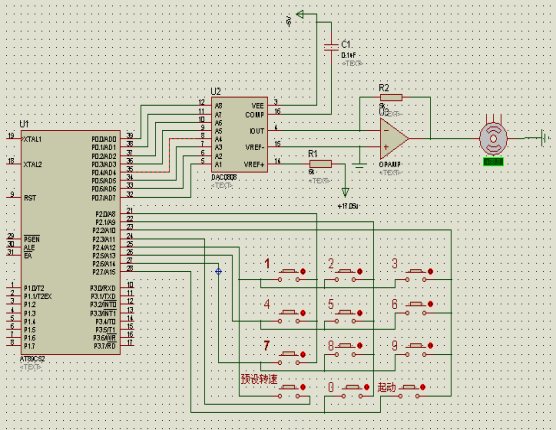
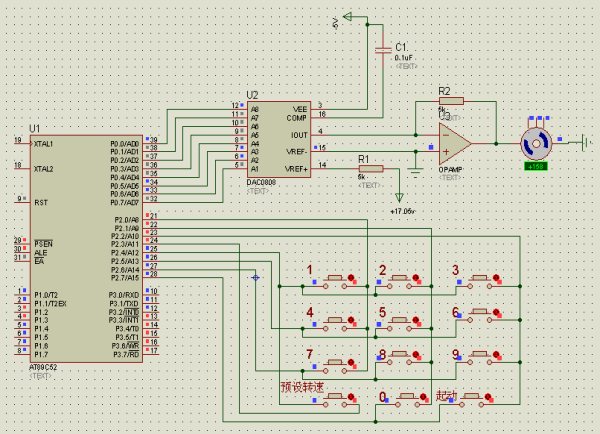
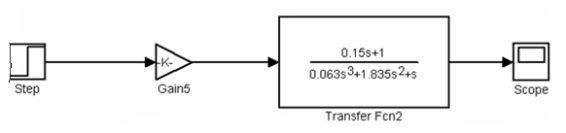
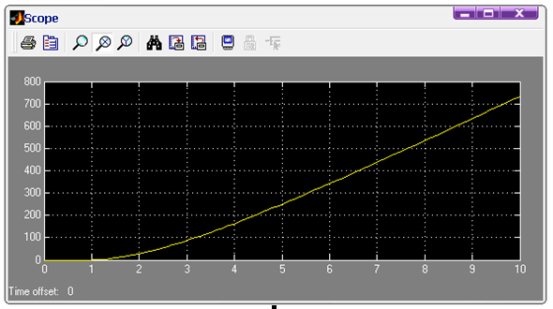
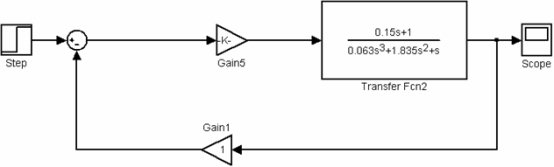
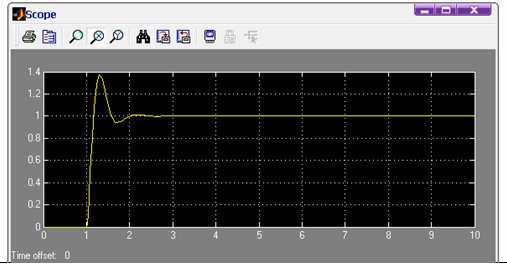
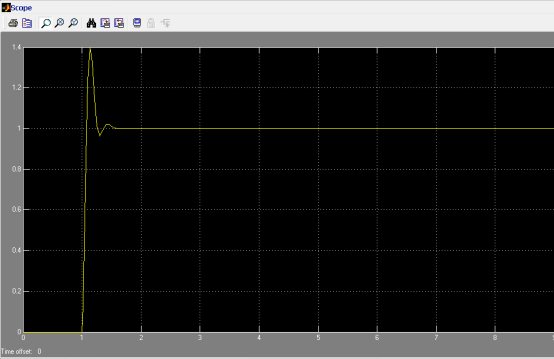
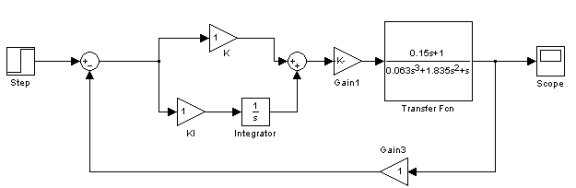
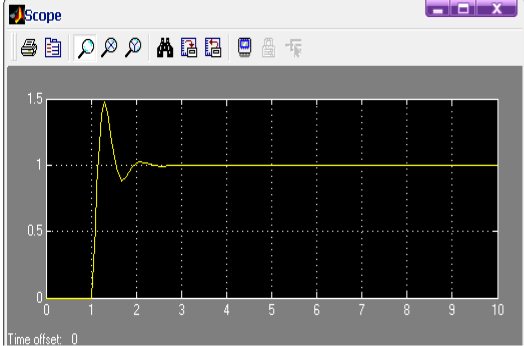
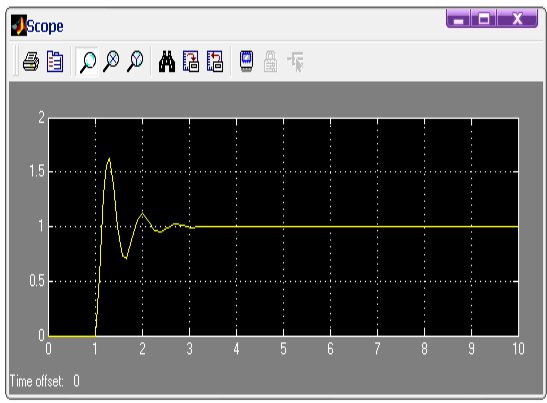
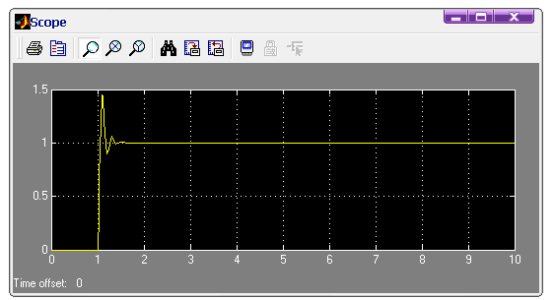
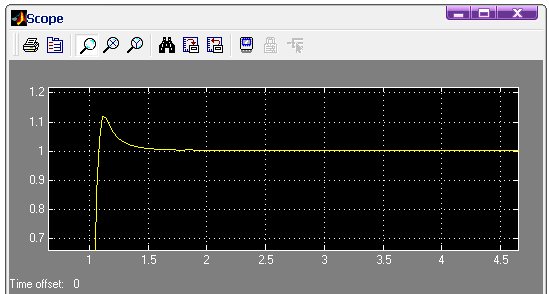
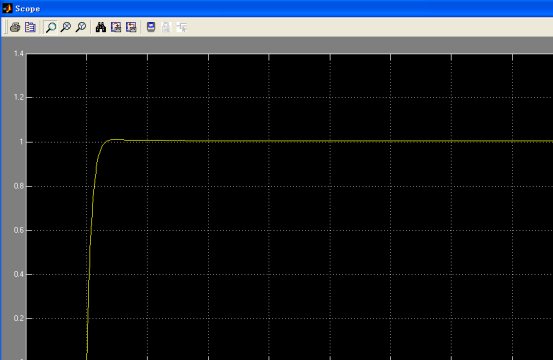
�D2-2 DAC0808���͑�(y��ng)���· 2.3�\(y��n)��Ŵ�����D/A�D(zhu��n)�Q�������ݔ���D(zhu��n)�Q��늉�ݔ����ͬ�r(sh��)Ҳ�ǰ�С�������̖(h��o)�Ŵ���^���늉���̖(h��o)�����(q��)��(d��ng)늙C(j��)�D(zhu��n)��(d��ng)�� 2.4���Iݔ����@ʾģ�K2.4.1 ���Iݔ�������Լ��O(sh��)Ӌ(j��)������3��4���ʽ���o�����o�����O(sh��)��ijһ��(sh��)ֵ����늙C(j��)�D(zhu��n)��ֵ��ͨ�^ �����O(sh��)���ӕr(sh��)�h(hu��n)��(ji��)���������o�Ķ���(d��ng)���}���@����ʹ���ʽ���oӲ���B�����Σ�ͬ�r(sh��)���o��ܛ���O(sh��)Ӌ(j��)Ҳ����(f��)�s�� 2.4.2 �@ʾģ�Kϵ�y(t��ng)�����c(di��n)�ʽҺ���@ʾ�����@ʾ늙C(j��)�Į�(d��ng)ǰ�D(zhu��n)��ֵ��ͨ�^ܛ���O(sh��)Ӌ(j��)ʹ���B�����Ρ� 2.5 ֱ���ŷ�늄�(d��ng)�C(j��)ֱ���ŷ�늄�(d��ng)�C(j��)���ŷ�ϵ�y(t��ng)�п��ƙC(j��)еԪ���\(y��n)�D(zhu��n)�İl(f��)��(d��ng)�C(j��).��һ�N�a(b��)���R�_(d��)�g��׃���b�á��ַQ��(zh��)��늄�(d��ng)�C(j��)�����Ԅ�(d��ng)����ϵ�y(t��ng)�У�������(zh��)��Ԫ���������յ������̖(h��o)�D(zhu��n)�Q��늄�(d��ng)�C(j��)�S�ϵĽ�λ�ƻ���ٶ�ݔ��������Ҫ���c(di��n)�ǣ���(d��ng)��̖(h��o)늉�����r(sh��)�o���D(zhu��n)�F(xi��n)���D(zhu��n)���S���D(zhu��n)�ص����Ӷ������½��������ÿ�ʹ�����ٶ�,λ�þ��ȷdz���(zh��n)�_�� ֱ���ŷ�늄�(d��ng)�C(j��)�ĽY(ji��)��(g��u)�cֱ��늄�(d��ng)�C(j��)������ͬ��ֻ�Ǟ�pС�D(zhu��n)��(d��ng)�T����늙C(j��)���ü�(x��)�LһЩ������ͬ����늘����C(j��)е����ܛ�����ԣ�������������(d��ng)����ֱ������(d��ng)������늷�ʽ������(l��)��늣�����(l��)���@�M��늘зքe�ɂ�(g��)��(d��)�����Դ��늡����Ʒ�ʽ��.늘п��ƺʹŘO���ƣ����и�׃늘�늉�U�{(di��o)�ٷ����^��ֱ���ŷ�늙C(j��)���ô˷����{(di��o)�� ֱ���ŷ�늄�(d��ng)�C(j��) �D(zhu��n)�ٵ�Ӌ(j��)�㹫ʽ���£� ʽ�У�n���D(zhu��n)�٣������ͨ��U�����늉���I��R��늘��������裻Ke��늄�ϵ��(sh��)�� 3.��Ƭ�C(j��)����ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)ܛ���O(sh��)Ӌ(j��)����ģ�K���O(sh��)Ӌ(j��)����������ģ�K���܌�(sh��)�F(xi��n)ģ�K�ɴֽM�ɡ�������ͨ�^�xȡ�Iֵ̎�����͵�D/A�D(zhu��n)�Q���_(d��)������늙C(j��)��Ŀ�ģ����܌�(sh��)�F(xi��n)ģ�K��Ҫ��������(sh��)ģ�K���I�P̎���ӳ����D/A�D(zhu��n)�Q�ӳ���ȽM�ɡ� 3.1���������������Ȍ�(du��)�I�P���@ʾģ�K�ij����M(j��n)�г�ʼ����ͨ�^�xȡ�Iֵ̎�����͵�D/A�D(zhu��n)�Q���_(d��)������늙C(j��)��Ŀ�ġ����������̈D��D2-1��ʾ�� �D2-1 ���������̈D 3.2�I�P̎���ӳ����I�P���ó������Ĺ�����ʽ�������ض��ij���λ�ö��ϰ����I�P��������xȡ�I�P��B(t��i)���I�P̎���ӳ���ij�����跨���̈D��D2-2��ʾ�� �D2-2 �I�P̎���ӳ���ij�����跨���̈D 4.����ϵ�y(t��ng)ԭ��D������4.1����ϵ�y(t��ng)����D����ϵ�y(t��ng)���Ԇ�Ƭ�C(j��)������� ��ͨ�^�I�P�O(sh��)��ݔ���D(zhu��n)��ֵ����(j��ng)��Ƭ�C(j��)̎�����͵�D/A�D(zhu��n)�Q����ģ�M��̖(h��o)��(j��ng)���ʷŴ���(q��)��(d��ng)늙C(j��)����K늙C(j��)���O(sh��)�����D(zhu��n)��ֵ��(w��n)�����D(zhu��n)���D4-1�������ϵ�y(t��ng)����D �D4-1 ����ϵ�y(t��ng)����D 4.2����ϵ�y(t��ng)�·ԭ��D�D4-2 ����ϵ�y(t��ng)�·ԭ��D 4.3 Proteus����Y(ji��)���D4-3 Proteus����D ����Proteus 7.4a�M(j��n)�з��棬��(d��ng)ͨ�^�I�P�x��ijһ��(sh��)ֵ�r(sh��)��늙C(j��)�D(zhu��n)�ټ�������(y��ng)���O(sh��)��ֵ�����ڷ����·�D��늙C(j��)�·��@ʾ늙C(j��)��(du��)��(y��ng)�D(zhu��n)��ֵ��׃������K��(w��n)��ֵ���D4-3�з���D�Ǯ�(d��ng)ͨ�^���I�O(sh��)��ֵ��158�r(sh��)��늙C(j��)�·�Һ���@ʾ�����@ʾ158������늙C(j��)�D(zhu��n)�ٞ�158 r/min����(j��ng)��η��������ijЩ�r(sh��)���c�I�Pݔ��ֵ����^��֪��(d��ng)늙C(j��)푑�(y��ng)ݔ��ֵ�r(sh��)�к�С�ķ�(w��n)�B(t��i)�`����ڣ�ԭ���Ǜ]�м��뷴���h(hu��n)��(ji��)����������MATLAB����ܛ���о�PID�������ƌ�(du��)ֱ���ŷ�늙C(j��)����ϵ�y(t��ng)�����á� 5.Simulink�M����(du��)ֱ���ŷ�����ϵ�y(t��ng)�ķ���5.1 MATLAB�cSimulink����5.1.1 MATLAB����MATLABܛ���Ƴ�����(y��ng)�õ��Ԅ�(d��ng)�����I(l��ng)��O��ظ������Ԅ�(d��ng)����ϵ�y(t��ng)�Ą�(d��ng)�B(t��i)��������ܷ����h(hu��n)����MATLAB(Matrix Laboratory����ꇌ�(sh��)�(y��n)��)��һ��(g��)�m���ڿƌW(xu��)Ӌ(j��)����̑�(y��ng)�õĔ�(sh��)�W(xu��)ܛ��ϵ�y(t��ng)����1982����Mathworksܛ����˾�Ƴ���(j��ng)��ʮ����İl(f��)չ���F(xi��n)����IEEE �M���J(r��n)�ɵ��(y��u)���ĿƼ���(y��ng)��ܛ�����ɞ��W(xu��)�̌W(xu��)�Ϳ�������õĹ��ߡ�������MATLAB�đ�(y��ng)�ã���(du��)ֱ���ŷ�늙C(j��)����Ч���ĸ��ƣ��϶��������벻���Ď�����ԓܛ�������������c(di��n)�� (1)��(sh��)ֵ�\(y��n)�㹦��(qi��ng)�� (2)���̭h(hu��n)�����Σ� (3)��(sh��)��(j��)��ҕ������(qi��ng)�� (4)�S���ij����䣻 (5)�ɔU(ku��)չ����(qi��ng)�ȡ� 5.1.2 Simulink����Simulink��MATLABܛ���ĔU(ku��)չ�����nj�(sh��)�F(xi��n)��(d��ng)�B(t��i)ϵ�y(t��ng)��ģ�ͷ����һ��(g��)ܛ���������cMATLAB�Z�Ե���Ҫ�^(q��)�e���ڣ����c�Ñ��Ľ����ӿ��ǻ���Windowsģ�ͻ��D��ݔ�룬ʹ���Ñ����Ѹ���ľ���Ͷ�뵽ϵ�y(t��ng)ģ�͵Ę�(g��u)�������Ǿ����ϡ� ʹ��Simulink�M(j��n)�з���һ��֞�ɲ����Ñ�������Ҫ�ڷ���ģ�;������д���Լ��ķ���ģ�ͣ��O(sh��)�úþ��wģ�ͅ���(sh��)�ͷ��慢��(sh��)��Ȼ��Ϳ����_ʼ���棬Simulink������(j��)�Ñ����ģ�ͣ�ģ�Mϵ�y(t��ng)���Ñ��O(sh��)���l���µľ��w�О顣���挢��ֱ���ŷ�늙C(j��)���Ԅ�(d��ng)���ƞ�������ʾMATLAB��Simulink����đ�(y��ng)�á� 5.2 ֱ���ŷ�늙C(j��)��(sh��)�W(xu��)ģ��ֱ���ŷ�늙C(j��)�_�h(hu��n)ϵ�y(t��ng)�Y(ji��)��(g��u)�D��D�D5-1��ʾ �D5-1 ֱ���ŷ�늙C(j��)�_�h(hu��n)ϵ�y(t��ng)�Y(ji��)��(g��u)�D ����ֱ���ŷ�늙C(j��)�Ă��f����(sh��)�� 5.3 ϵ�y(t��ng)Simulinkģ�ͼ��r(sh��)�����Է�����(du��)�چ�ݔ���ݔ��ϵ�y(t��ng)���ڽ�(j��ng)�������Փ�п��Â��f����(sh��)������ϵ�y(t��ng)�� �@��ϵ�y(t��ng)�Ą�(d��ng)�B(t��i)푑�(y��ng)��ͬ�ӣ�S����ܛ��Ҳ�Ђ��f����(sh��)ģ�K���ɷ��������ϵ�y(t��ng)�����ԣ��Һ����˷���ģ�͡���ģ�K�촰�ڄ�(chu��ng)��ϵ�y(t��ng)ģ����D1��ʾ���x��̖(h��o)Դģ�K�M�е��A�S��̖(h��o)ģ�K��ݔ����̖(h��o)����ݔ��ģ�K�M�е�ʾ����ģ�K�����@ʾ�����^��ϵ�y(t��ng)�A�S푑�(y��ng)����ģ�ʹ����O(sh��)�Â��f����(sh��)ģ�K�ą���(sh��)�����ԣ��\(y��n)�з���ģ�ͣ���ϵ�y(t��ng)�A�S푑�(y��ng)������ 5.3.1 �_�h(hu��n)ϵ�y(t��ng)Simulinkģ�ͼ������D5-2 ֱ���ŷ�늙C(j��)�_�h(hu��n)ϵ�y(t��ng)Simulinkģ�� �˿�Step��ֱ���ŷ�늙C(j��)��ݔ��늉�,ݔ���˿ڞ�늙C(j��)�D(zhu��n)�١� �D5-3���_�h(hu��n)ϵ�y(t��ng)�ķ���Y(ji��)�������_�h(hu��n)ϵ�y(t��ng)���A�S푑�(y��ng)������Ҳ��ֱ���ŷ�늙C(j��)ݔ��1V��λ�A�S늉��r(sh��)��늙C(j��)���D(zhu��n)�Sݔ���ʾ���׃���� �D5-3 �_�h(hu��n)ϵ�y(t��ng)����D �ɈD5-3푑�(y��ng)������֪��ϵ�y(t��ng)�]���ڿ�ҕ������(n��i)�_(d��)����(w��n)�B(t��i)ֵ��1����������Փ�Ϸ���֪��ϵ�y(t��ng)�ٷ�(w��n)��ϵ�y(t��ng)�������r(sh��)�g��(n��i)���܉��_(d��)����(w��n)����B(t��i)�ġ����������f����ϵ�y(t��ng)��푑�(y��ng)�ٶ��^����ϵ�y(t��ng)�����^��Ķ����ܲ��߂�ʹ�Ãr(ji��)ֵ���@��(g��)�����Y(ji��)��������ԓϵ�y(t��ng)�]���_(d��)���A(y��)�ڵ��O(sh��)Ӌ(j��)Ҫ�� 5.3.2 ��λؓ(f��)����ϵ�y(t��ng)Simulinkģ�ͼ������D5-4���ڈD5-3�Ļ��A(ch��)�ϼ�һ��(g��)��λؓ(f��)�����h(hu��n)��(ji��)����(g��u)��ֱ���ŷ�늙C(j��)�Ć�λؓ(f��)����ϵ�y(t��ng)����λؓ(f��)����ϵ�y(t��ng)Simulinkģ����D5-4��ʾ �D5-4 ֱ���ŷ�늙C(j��)��λؓ(f��)����ϵ�y(t��ng)Simulinkģ�� �D5-5�dž�λؓ(f��)����ϵ�y(t��ng)�ķ���Y(ji��)�� �D5-5 ��λؓ(f��)����ϵ�y(t��ng)����D ϵ�y(t��ng)���{(di��o)��40%���{(di��o)��(ji��)�r(sh��)�g��2 s���ɈD5-5���_�h(hu��n)�A�S푑�(y��ng)��������^֪��ϵ�y(t��ng)��(y��ng)��(j��ng)�����_(d��)���^���_(d��)����(w��n)�B(t��i)ֵ���f���]�h(hu��n)��λؓ(f��)����ϵ�y(t��ng)��(du��)ϵ�y(t��ng)�����кܴ���ơ� 5.4 PIDУ������ʹϵ�y(t��ng)�܉��_(d��)���O(sh��)Ӌ(j��)Ҫ���҂������ڈD5-4ǰ��ͨ�����O(sh��)��һ��(g��)��������(g��u)���]�h(hu��n)ϵ�y(t��ng)��У��ֱ���ŷ�늙C(j��)������PID���ƣ��]�h(hu��n)����ֱ���ŷ�늙C(j��)ϵ�y(t��ng)��D��D5-6��ʾ�� �D5-6 ����PID���ƣ��]�h(hu��n)����ֱ���ŷ�늙C(j��)ϵ�y(t��ng)��D ������^�̞��ɜy�ٰl(f��)늙C(j��)ݔ��늉��õ�ֱ��늙C(j��)ݔ���������D(zhu��n)�٣�ͨ�^�D(zhu��n)�ٷ������cϵ�y(t��ng)ݔ����̖(h��o)�M(j��n)�б��^���õ�ƫ����̖(h��o)��ƫ����̖(h��o)����PID��������ݔ����̖(h��o)����(j��)�O(sh��)����PID����Ҏ(gu��)��Ӌ(j��)���ݔ����̖(h��o)U�����������ݔ��oֱ��늙C(j��)���Ķ���(sh��)�F(xi��n)����(g��)ֱ��늙C(j��)�{(di��o)��ϵ�y(t��ng)���]�h(hu��n)ؓ(f��)����PID���ơ� 5.4.1 PID����(sh��)�Ĝ�ԇ���_���������ϵ��(sh��)KPһ��ϵ�y(t��ng)푑�(y��ng)���ڜpС�o������^���(hu��)�����{(di��o)�����a(ch��n)����ʎ���Ƿ�(w��n)����׃�ġ�����TI�МpС���{(di��o)���pС��ʎ����ϵ�y(t��ng)����(w��n)�������o������׃����������TD���ڼӿ�ϵ�y(t��ng)푑�(y��ng)�r(sh��)�g��ʹ���{(di��o)�pС����(w��n)�������ӣ�����(du��)�_��(d��ng)�����������p������(du��)�_��(d��ng)���^���е�푑�(y��ng)�� �ڜ�ԇ�r(sh��)����(du��)����(sh��)��(sh��)�������ȱ�������e�֣����ֵ��������E�� (1)����ֻ�����������֡���������������С׃���^������(y��ng)��ϵ�y(t��ng)푑�(y��ng)��ֱ���õ�����(y��ng)�죬���{(di��o)С��푑�(y��ng)���������ϵ�y(t��ng)�]���o����o����С�����S������(n��i)������푑�(y��ng)�����ьٝM�⣬��ôֻ���ñ������������ɣ��(y��u)����ϵ��(sh��)���ɴ˴_���� (2)����ڱ����{(di��o)��(ji��)�Ļ��A(ch��)��ϵ�y(t��ng)���o��ܝM���O(sh��)Ӌ(j��)Ҫ�t횼���e�֭h(hu��n)��(ji��)�������r(sh��)�����÷e�֕r(sh��)�gT1��һ�^��ֵ��������(j��ng)��һ�������õ��ı���ϵ��(sh��)���sС��Ȼ��pС�e�֕r(sh��)�g�����ڱ���ϵ�y(t��ng)���Ä�(d��ng)�B(t��i)���ܵ���r�£��o��õ��������ڴ��^���У��ɸ���(j��)푑�(y��ng)�����ĺÉķ���(f��)��׃����ϵ��(sh��)�c�e�֕r(sh��)�g�����ڵõ��M��Ŀ����^���c��������(sh��)�� (3)��ʹ�ñ����e�ֿ������������o�����(d��ng)�B(t��i)�^�̽�(j��ng)����(f��)�{(di��o)���Բ��ܝM�⣬�t�ɼ����֭h(hu��n)��(ji��)����(g��u)�ɱ����e���ֿ��������������r(sh��)���������֕r(sh��)�gTd���㡣�ڵڶ��������Ļ��A(ch��)�ϣ�����Td��ͬ�r(sh��)����(y��ng)�ĸ�׃����ϵ��(sh��)�ͷe�֕r(sh��)�g����ԇ���ԫ@�ÝM����{(di��o)��(ji��)Ч���Ϳ��ƅ���(sh��)�� 5.4.2 ����������У������Ҫ��ϵ�y(t��ng)���e�̵ĕr(sh��)�g��(n��i)�_(d��)���O(sh��)�����D(zhu��n)��ֵ����������K ��(y��ng)�M���ܴ�����߱������õď�(qi��ng)�ȣ������ͬ�r(sh��)���]ϵ�y(t��ng)�ķ�(w��n)���ԡ����Æμ��ı������ƣ����{(di��o)���r(sh��)�g�ͳ��{(di��o)����һ��(du��)ì�ܣ��o��ͬ�r(sh��)�M�㣺Ҫ�s���{(di��o)���r(sh��)�g��K Ҫ�Ӵ�K �Ӵ��{(di��o)��Ҳͬ�r(sh��)�Ӵ��ˡ���(j��ng)�^��΅���(sh��)�x��(d��ng)K��=10�r(sh��)���A�S푑�(y��ng)�����^�����룬�ʬF(xi��n)�ӽ�0��75˥�p�ʵ���ʎ�^�̡� ��������ϵ�y(t��ng)Simulinkģ�ͼ����� �D5-7 ��������ϵ�y(t��ng)Simulinkģ�� Kp=1�r(sh��)����D Kp=3�r(sh��)����D Kp=5�r(sh��)����D ����������(g��)�������Ƶķ���D��֪���������ϵ��(sh��)KPһ��ϵ�y(t��ng)푑�(y��ng)���ڜpС�o������^���(hu��)�����{(di��o)�����a(ch��n)����ʎ���Ƿ�(w��n)����׃�ġ� 5.4.3 �����e�ֿ�����У���e�ֿ��Ƶ�������ֻҪϵ�y(t��ng)�����`��e�ֿ������þͲ���طe�ۣ�ݔ���������������`������ֻҪ�����ĕr(sh��)�g���e�ֿ��ƌ�����ȫ�����`��ڱ����h(hu��n)��(ji��)���A(ch��)�ϼ���e�֭h(hu��n)��(ji��)��ֻҪ����(sh��)�O(sh��)�ú��m������ȫ����ϵ�y(t��ng)ƫ� �����e�ֿ���ϵ�y(t��ng)Simulinkģ�� �D5-8 �����e�ֿ���ϵ�y(t��ng)Simulinkģ�� Kp=1��Ki=1�r(sh��)����D Kp=1��Ki=3�r(sh��)����D Kp=5��Ki=3�r(sh��)����D ����������(g��)�����e�ֿ��Ƶķ���D��֪������TI�МpС���{(di��o)���pС��ʎ��ʹϵ�y(t��ng)����(w��n)�������o������׃����PI���ƅ���(sh��)�O(sh��)���m��(d��ng)��ʹϵ�y(t��ng)�o����㡣��(j��ng)���ԇ�����xKI=1. 5.4.4 PID������У�������e�������m����ϵ�y(t��ng)�`����㣬��ϵ�y(t��ng)��(d��ng)�B(t��i)���ܲ��ܵõ��M�㡣�e������̫��(qi��ng)���ܕ�(hu��)ʹϵ�y(t��ng)���F(xi��n)��ʎ���ֿ��ƾ��г�ǰ��������������������(d��ng)�B(t��i)ƫ�����ϵ�y(t��ng)��(d��ng)�B(t��i)���ܣ����ϵ�y(t��ng)�ķ�(w��n)���ԡ���ˣ���PI���û��A(ch��)�������ֿ��ƣ���(g��u)��PID����������ʹϵ�y(t��ng)�M�㷀(w��n)����(zh��n)�����Ҫ�� PID���ƿ���ϵ�y(t��ng)Simulinkģ����D �D5-9 PID����ϵ�y(t��ng)Simulinkģ�� Kp=1��Ki=1��Kd=0.1�r(sh��)����D ��PI�����]�h(hu��n)푑�(y��ng)��������^��֪��ϵ�y(t��ng)푑�(y��ng)�r(sh��)�g׃�̣����{(di��o)׃С�����Բ�����Ҫ�� Kp=5��Ki=1��Kd=0.1�r(sh��)����D �cKP=1��KI=1��KD=0.1�r(sh��)�ķ���D��ȣ�ϵ�y(t��ng)���{(di��o)���{(di��o)��(ji��)�r(sh��)�g��׃С����Ȼ������Ҫ���^�m(x��)У������Ӵ�Kp��Ki�� Kp=12��Ki=1��Kd=0.5�r(sh��)����D ��������֪�˕r(sh��)ϵ�y(t��ng)�����ij��{(di��o)���M(j��n)һ���Ӵ�Ki�r(sh��)���{(di��o)���㡣 Kp=12��Ki=1��Kd=0.9�r(sh��)����D ��(j��ng)�^���У������(sh��)���˕r(sh��)��(d��ng) Kp=12��Ki=1��Kd=0.9�r(sh��)ϵ�y(t��ng)���{(di��o)����0����(w��n)�B(t��i)�`���0�����ܝM���O(sh��)Ӌ(j��)Ҫ��(w��n)������(zh��n)�_�����ٵõ�����M�Ľy(t��ng)һ�� 6��С�Y(ji��)����ϵ�y(t��ng)���c(di��n)���Ԇ�Ƭ�C(j��)������� ��ͨ�^�I�P�O(sh��)��ݔ���D(zhu��n)��ֵ��ʹ��늙C(j��)���D(zhu��n)���O(sh��)�÷����ݣ�������ͨ�^ܛ����(sh��)�F(xi��n)ϵ�y(t��ng)�D(zhu��n)���O(sh��)�÷����ı��o(h��)�� ����proteus�Л]�܌�(sh��)�F(xi��n)�]�h(hu��n)ϵ�y(t��ng)��PID���ơ���ȱ�c(di��n)ͨ�^ܛ�����a(b��)����MATLABܛ���е�SIMULINK���M(j��n)����ֱ���ŷ�늙C(j��)���_�h(hu��n)����ϵ�y(t��ng)���棬��λ�]�h(hu��n)����ϵ�y(t��ng)���棬�]�h(hu��n)PI����ϵ�y(t��ng)����,�]�h(hu��n)PD���Ʒ���,�]�h(hu��n)PID���Ʒ����܉���õĜyԇ�Ϳ���ϵ�y(t��ng)�����ܣ��Ķ����O(sh��)Ӌ(j��)�����ṩ�˸���(zh��n)�_������ָ��(bi��o)��
- #include "reg52.h"
- //#include "absacc.h"
- //#include "stdio.h"
- //#include "math.h"
- //#include "string.h"
- #define unchar unsigned char
- #define unint unsigned int
- void wdata(unchar dat);//write data function
- void wcom(unchar com);//write command function
- void delay(unchar t);//delay function
- sbit rw=P3^1;//rw
- sbit rs=P3^0;//rs
- sbit en=P3^2;//en
- #define MAX_LEN 16 // ��(sh��)��(j��)����L��
- #define count_M1 50000
- #define H_0 (65536-count_M1)/256
- #define L_0 (65536-count_M1)%256
- unchar code tab2[]={0x31,0x32,0x33,0x41,0x34,0x35,0x36,0x42,0x37,0x38,0x39,
- 0x43,0x0e,0x30,0x0f,0x44}; //�I�P��ֵ��
- unchar code tab3[]={"Target Value: "};
- unchar code tab4[]={" "};
- unchar code tab6[]={" input ERR "};
- unchar serial_data[MAX_LEN],serial_len=0,sure_flag=0;
-
- void wdata(unchar dat);//write data function
- void wcom(unchar com);//write command function
- void delay(unchar t);//delay function
- void keyscan(void);//�I�P��������
- unchar scankey(void);//�I�P��ֵ����
- void chushi(void);//��ʼ������
- //void init_serial(void);//���ڳ�ʼ��
- //void uart_serial(void);//����������
- void lcd_write(void);//Һ���@ʾ���l(f��)��ָ��
- unchar jisuan(void);//Ӌ(j��)��Y(ji��)����ʮ�M(j��n)��
- unint freq = 0;//�l��׃��
- sfr16 DPTR=0x82;//����DPTR
- char times=0;//Ӌ(j��)��T0�Д�Δ�(sh��)
- //delay function
- //P0=0x00;
- //�Д��ʼ��
- void init_interrup(void)
- {
- IE=0x8a;//����T0��T1��
- TMOD=0x51;//T1��Ӌ(j��)��(sh��)����T2�鶨�r(sh��)����������mode1
- TH0=H_0;
- TL0=L_0;
- TH1=0;
- TL1=0;
- TR0=1;
- TR1=1;
- }
- void delay(unchar t)
- {
- unchar a,b;
- for(a=0;a<t;a++)
- for(b=0;b<128;b++);
- }
- //The function for write data to LCD screen
- void wdata(unchar dat)
- {
- P1=dat;
- rs=1;
- rw=0;
- en=0;
- delay(6);
- en=1;
- }
- //The function for write command to LCD screen
- void wcom(unchar com)
- {
- P1=com;
- rs=0;
- rw=0;
- en=0;
- delay(6);
- en=1;
- }
- //��ʼ����
- void chushi(void)
- {
- unchar i;
- wcom(0x01);
- wcom(0x38);
- wcom(0x0c);
- wcom(0x06);
- delay(4);
- wcom(0x80);
- delay(4);
- for(i=0;i<17;i++)
- {
- wdata(tab3[i]);
- }
- wcom(0xc0);
- delay(2);
- }
- //�I�P��ֵ����
- unchar scankey(void)
- {
- unchar temp,c,d;
- P2=0x0f;
- temp=P2;
- temp=temp&0x0f;//���θ���λ��ȡ��ֵ
- temp=~(temp|0xf0);//��temp�еă�(n��i)���c0xf0�M(j��n)����ӣ�����ɵõ������а���
- if(temp==1)
- c=0;//P2.0λ���ƽ
- else if(temp==2)
- c=1;//P2.1λ���ƽ
- else if(temp==4)
- c=2;//P2.2λ���ƽ
- else if(temp==8)
- c=3;//P2.3λ���ƽ
- else
- c=0;//��t�o����ֵC=0
- P2=0xf0;//�oP2���О���ƽ���ԁ��Д��Ǹ��Ğ����λ����ƽ
- delay(1);
- temp=P2;
- temp=temp&0xf0;//���ε���λ
- temp=~((temp>>4)|0xf0);//��temp�еĸ���λ�����Ƅ�(d��ng)4λ���c0xf0��ӣ�������Եõ������а���
- if(temp==1)
- c=c+0;//����P2.4��ֵ�����е�ֵ
- else if(temp==2)
- c=c+4;//����P2.5��ֵ�����е�ֵ
- else if(temp==4)
- c=c+8;//����P2.6��ֵ�����е�ֵ
- else if(temp==8)
- c=c+12;//����P2.7��ֵ�����е�ֵ
- else
- c=0;
- d=tab2[c];
- return (d);//����м��е�ֵ
- }
-
- //lcd_write function
- void lcd_write(void)
- {
- unchar write_0,write_1,jian_zhi[MAX_LEN];
- for(write_0=0;write_0<MAX_LEN;write_0++)
- {
- serial_data[write_0]=0;
- } //��հl(f��)�;��_��(sh��)�M
- wcom(0x0f); // �����(bi��o)����oxc0̎
- serial_len=0;
- delay(2);
- while(1)
- {
- write_1=0xc0; //���(bi��o)��ַ
- wcom(write_1);
- for(write_0=0;write_0<MAX_LEN; ) //ݔ��ָ�� ����MAX_LEN
- {
- wcom(write_1);
- P2=0x0f; //�ȴ��I�Pֵ
- while((P2&0x0f)==0x0f);
- jian_zhi[write_0]=scankey();
- delay(1);
- P2=0x0f;
- while((P2&0x0f)!=0x0f); //�ȴ����I����
- if(jian_zhi[write_0]==0x0e) //��(d��ng)��һ��ȡ���I�r(sh��) ������аl(f��)�;��_��(sh��)�M��
- { //��(d��ng)�B�m(x��)���ɴΕr(sh��)�tȡ������ͨӍ���˳�
- if(write_0==0)
- goto write_out;
- else if(write_0>=1)
- {
- write_1-=1;
- wcom(write_1);
- write_0-=1;
- wdata(tab4[0]);
- serial_data[write_0]=0;
- serial_len--;
- }
- }
- else if(jian_zhi[write_0]==0x0f) //�_���l(f��)�͵�ָ��
- {
- if(serial_len==3)
- {if(serial_data[0]<2)
- sure_flag++;
- else if(serial_data[0]>2);
- else
- {
- if(serial_data[1]<5)
- sure_flag++;
- else if(serial_data[1]>5);
- else
- {
- if(serial_data[2]<6)
- sure_flag++;
- else ;
- }
- }
- }
- else
- sure_flag++; //�_���Ę�(bi��o)־λ
- goto write_out; //�˳�����ݔ��ָ��
- }
- else
- {
- wdata(jian_zhi[write_0]);
- if(jian_zhi[write_0]<=0x39)
- serial_data[write_0]=jian_zhi[write_0]-0x30;
- else
- serial_data[write_0]=jian_zhi[write_0]-0x37;
- write_1++;
- write_0++;
- serial_len++;
- }
- }
- }
- write_out :
- delay(1);
- }
- //�ϲ���(sh��)�M
- void serial_and(void)
- {
- unchar and0,and1,and2=0;
- and1=serial_len/2;
- for(and0=0;and0<and1;and0++)
- {
- serial_data[and0]=(serial_data[and0+and2++]<<4)|serial_data[and0+and2];
- }
- }
- //�I�P����
- void keyscan(void)
- {
- unchar ks_0,ks_1;
- delay(2);//�ӕr(sh��)ȥ����(d��ng)
- P2=0x0f;
- if((P2&0x0f)!=0x0f)//�ӕr(sh��)�����Д�һ�Σ�ȥ������(d��ng)Ӱ�
- {
- ks_0=scankey(); //���I�Pֵ
- P2=0x0f;
- while((P2&0x0f)!=0x0f); //�ȴ�����
- while(ks_0==0x41)
- {
- switch(ks_0)
- {
- case 0x41 :
- {
- chushi();
- lcd_write(); //�{(di��o)�Ì�ָ�����
- if((sure_flag==1)&&(serial_len<=3)&&(jisuan()<256))
- //�l(f��)��ָ��ėl��_�J(r��n)�l(f��)�͘�(bi��o)־sure_flag=1&&���ΰl(f��)��ָ��Ă�(g��)��(sh��)erial_len=6
- {
- sure_flag=0; //����_����(bi��o)־
- //serial_and();//�ϲ���(sh��)�M
- // serial_len/=2;
- // uart_serial();//�{(di��o)�ðl(f��)��ָ�����
- // P0=serial_data[0];
- P0=jisuan();
- // P0=255;
- }
- else
- {
- wcom(0xc0);
- for(ks_0=0;ks_0<10;ks_0++)
- {
- wdata(tab6[ks_0]);
- }
- for(ks_0=0;ks_0<10;ks_0++)
- {
- delay(250);
- }
- }
- delay(1);
- }break;
- default :
- break;
- }
- ks_0=0;
- }
- sure_flag=0;
- serial_len=0;
- chushi(); //��ʼ�����ȴ���һ�ΰl(f��)��ָ��
- wcom(0xc0);
- for(ks_1=0;ks_1<MAX_LEN;ks_1++) //��հl(f��)�;��_��(sh��)�M
- serial_data[ks_1]=0;
- }
- }
- // ��ȡݔ��ֵ�D(zhu��n)�Q��ʮ�M(j��n)��
- unchar jisuan(void)
- {
- unchar jieguo;
- if(serial_len==3)
- jieguo=serial_data[0]*100+serial_data[1]*10+serial_data[2];
- else if(serial_len==2)
- jieguo=serial_data[0]*10+serial_data[1];
- else if(serial_len==1)
- jieguo=serial_data[0];
- else ;
- ����������������
- �����������ڱ���ƪ�� ���´��aՈ(q��ng)��51�����d������������
������Word��ʽ�ęn51�����d��ַ��
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664














 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��