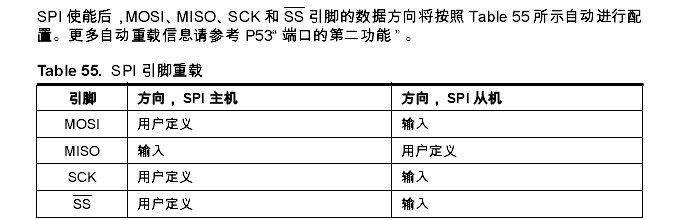
SPI:一種3線(xiàn)(有的沒(méi)有SS線(xiàn)(選擇主或從機(jī)模式))或4線(xiàn)的通信方式:
MOSI:主機(jī)出從機(jī)進(jìn)數(shù)據(jù)線(xiàn)
MISO:主機(jī)進(jìn)從機(jī)從數(shù)據(jù)線(xiàn)
SCK: 時(shí)鐘線(xiàn)
SS: 主從模式選擇線(xiàn)
工作過(guò)程的理解:設(shè)置好相應(yīng)的配置后就可以發(fā)送或接收數(shù)據(jù),當(dāng)放送或接收完成后就會(huì)是SPIF置位,此時(shí)如果開(kāi)了中斷就會(huì)就入中斷服務(wù)程序。如果沒(méi)開(kāi)中斷就可以通過(guò)查詢(xún)?cè)摌?biāo)志位來(lái)做相應(yīng)的事。進(jìn)入中段服務(wù)程序后,或者讀(寫(xiě))SPDR寄存器都可以清零SPIF標(biāo)志位。從而可以開(kāi)始下一次的傳輸
相應(yīng)的寄存器
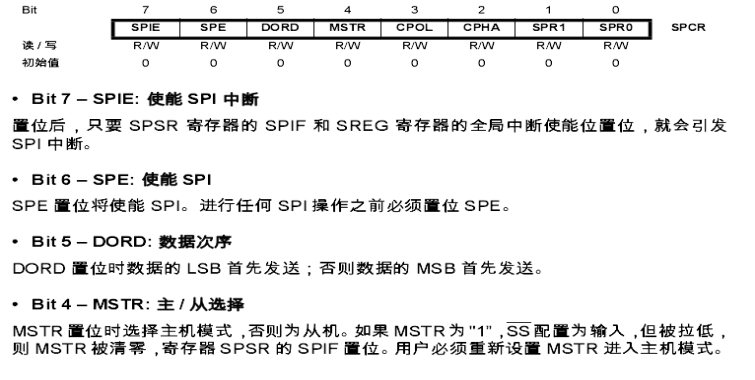
1:SCPR:控制寄存器:SPI的大部分設(shè)置
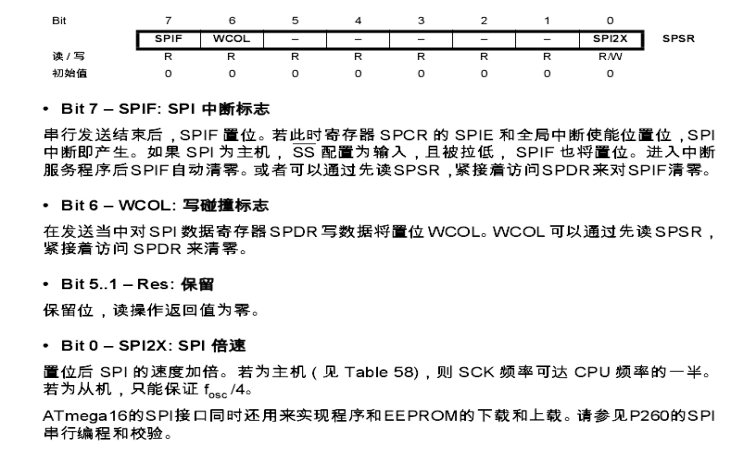
2:SPSR:標(biāo)志寄存器:(查看一些標(biāo)志(主要是SPIF位)和設(shè)置SPI速度)
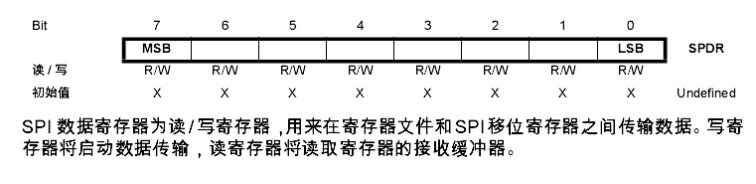
3:SPDR:數(shù)據(jù)寄存器:
SS引腳的說(shuō)明:(實(shí)質(zhì)就是當(dāng)配置為輸入時(shí):是主機(jī)還是從機(jī)由輸入的電平來(lái)決定)
從機(jī)模式: 當(dāng) SPI 配置為從機(jī)時(shí),從機(jī)選擇引腳 SS 總是為輸入。SS 為低將激活 SPI 接口, MISO
成為輸出 ( 用戶(hù)必須進(jìn)行相應(yīng)的端口配置 ) 引腳,其他引腳成為輸入引腳。當(dāng) SS 為高時(shí)
所有的引腳成為輸入, SPI 邏輯復(fù)位,不再接收數(shù)據(jù)。
SS引腳對(duì)于數(shù)據(jù)包/字節(jié)的同步非常有用,可以使從機(jī)的位計(jì)數(shù)器與主機(jī)的時(shí)鐘發(fā)生器同
步。當(dāng)SS 拉高時(shí)SPI從機(jī)立即復(fù)位接收和發(fā)送邏輯,并丟棄移位寄存器里不完整的數(shù)據(jù)。
主機(jī)模式:當(dāng) SPI 配置為主機(jī)時(shí) (SPCR 的 MSTR置位 ),用戶(hù)可以決定 SS 引腳的方向。
若 SS 配置為輸出,則此引腳可以用作普通的 I/O 口而不影響 SPI 系統(tǒng)。典型應(yīng)用是用來(lái)
驅(qū)動(dòng)從機(jī)的 SS 引腳。
如果 SS 配置為輸入,必須保持為高以保證 SPI 的正常工作。若系統(tǒng)配置為主機(jī),SS 為
輸入,但被外設(shè)拉低,則 SPI 系統(tǒng)會(huì)將此低電平解釋為有一個(gè)外部主機(jī)將自己選擇為從
機(jī)。為了防止總線(xiàn)沖突, SPI 系統(tǒng)將實(shí)現(xiàn)如下動(dòng)作:
1. 清零 SPCR 的 MSTR 位,使 SPI 成為從機(jī),從而 MOSI 和 SCK變?yōu)檩斎搿?/font>
2. SPSR 的 SPIF 置位。若 SPI 中斷和全局中斷開(kāi)放,則中斷服務(wù)程序?qū)⒌玫綀?zhí)行。
因此,使用中斷方式處理 SPI 主機(jī)的數(shù)據(jù)傳輸,并且存在 SS 被拉低的可能性時(shí),中斷服
務(wù)程序應(yīng)該檢查 MSTR 是否為 "1”。若被清零,用戶(hù)必須將其置位,以重新使能 SPI 主機(jī)
模式。
管腳配置
一:SCPR:控制寄存器:(SPI的大部分設(shè)置都在該寄存器) 二SPSR:標(biāo)志寄存器:(查看一些標(biāo)志和設(shè)置SPI速度,主要是用到SPIF這個(gè)標(biāo)志位,接收完成和發(fā)送完成都會(huì)置位這個(gè)標(biāo)志,進(jìn)入中斷服務(wù)程序或訪(fǎng)問(wèn)SPDR寄存 器都可以清零這個(gè)標(biāo)志) 三SPDR:數(shù)據(jù)寄存器:
應(yīng)用步驟: 1先根據(jù)是主還是從設(shè)置端口的模式(輸入還是輸出) 主機(jī):SS MOSI SCK 為出 MISO為入 從機(jī):SS MOSI SCK 為入 MISO 為出 2配置相應(yīng)的寄存器(就三個(gè)寄存器,注意用到中斷時(shí)要先開(kāi)總中斷) 3用中斷或查詢(xún)法發(fā)送或接收數(shù)據(jù) 注意:主機(jī)或者從機(jī)都可以發(fā)送或接收。發(fā)送完之后就可以馬上發(fā)下一個(gè)數(shù)據(jù)了。接收也是只要接收完了也可以馬上接收下一個(gè)數(shù)據(jù)了 一:發(fā)送:(一般用查詢(xún)方式發(fā)送比較好:此時(shí)只要查詢(xún)發(fā)送完畢的標(biāo)志位SPIF是否置位) 常用:while(!(SPSR & (1<<SPIF))); //等待發(fā)送完畢或接收完畢 查詢(xún)法:實(shí)質(zhì)就是查詢(xún)SPSR的SPIF位是否置位,接收完和發(fā)送完都可以置位,(如果開(kāi)了中斷的話(huà)就會(huì)進(jìn)入相應(yīng)的中斷) 例子: - 主機(jī)發(fā)送(查詢(xún)方式)(只要發(fā)送完畢了就可以繼續(xù)發(fā)送了)
//主機(jī)模式下發(fā)送1-255 - #include <avr/io.h>
- #define uint unsigned int
- #define uchar unsigned char
- void spi_init(void)
- {
- PORTB |= (1<<PB4) | (1<<PB5) | (1<<PB6) | (1<<PB7); //
- DDRB |= (1<<DDB5) | (1<<DDB7) | (1<<DDB4); //Set MOSI, SCK AND SS as outputs
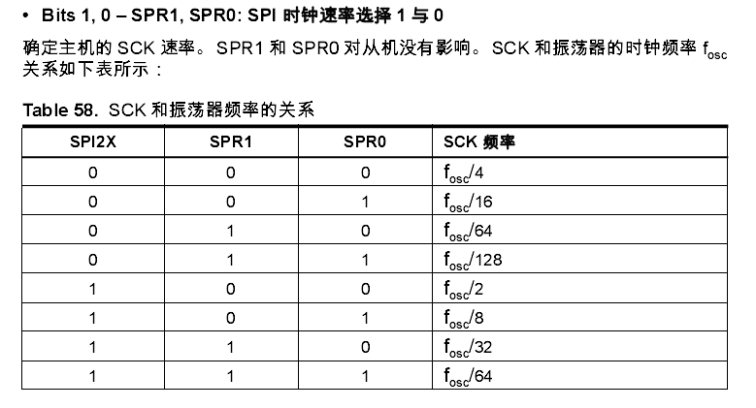
- SPCR = 0x73; //SPI使能,低位首發(fā),主機(jī)模式,時(shí)鐘模式00,上升沿采樣;時(shí)鐘速率Fosc/128
- SPSR = 0x00; //SPI2x=0
- }
- void SPI_send_data(char cData)
- {
- PORTB &=~ (1<<PB4); //強(qiáng)制接收方進(jìn)入從模式(在接收方的NSS引腳沒(méi)有接地時(shí))
- // SPCR |= (1<<MSTR); // MSTR有時(shí)會(huì)被清零,這里強(qiáng)制進(jìn)入主機(jī)模式
- SPDR =cData;
- while(!(SPSR & (1<<SPIF))); //等待發(fā)送完畢
- // PORTB |= (1<<PB4); //相當(dāng)于釋放總線(xiàn)(這樣可以讓別的主機(jī)控制從機(jī))
-
- }
-
- void Delay(uint z) //
- {
- unsigned int i,j;
- for(i=z;i>0;i--)
- for(j=2000;j>0;j--);
-
- }
-
- int main(void)
- {
- unsigned int i=0;
- spi_init();
- while(1)
- {
- for(i=255;i>0;i--)
- {
- SPI_send_data(i);
- Delay(100);
- }
- }
- }
2從機(jī)接收(查詢(xún)方式)
- #include <avr/io.h>
- #include <avr/delay.h>
- #define uchar unsigned char
- #define uint unsigned int
- void port_init(void)
- {
- PORTA = 0x00;
- DDRA = 0xFF;
- PORTB = 0xFF;
- }
-
- void spi_init(void)
- {
- DDRB = (1<<5) |(1<<7);
- DDRB&=~(1<<4)|(1<<6);
- SPCR = 0x63; // SPI允許。從機(jī)方式
- SPSR = 0x00; // SPI倍速.頻率為系統(tǒng)時(shí)鐘
- }
-
- void init_devices(void)
- {
- port_init();
- spi_init();
- }
- //主函數(shù)
- int main(void)
- {
- init_devices();
- while(1)
- {
- while(!(SPSR & (1<<SPIF)));//等待數(shù)據(jù)接收完成
- PORTA=SPDR;//把接收到的數(shù)據(jù)賦給A口
- _delay_loop_2(900);
-
- }
- }
3從機(jī)中斷方式接收數(shù)據(jù)(注意:當(dāng)進(jìn)入中斷服務(wù)程序后SPIF會(huì)自動(dòng)清零)
- /*中斷方式接收數(shù)據(jù)*/
- #include <avr/io.h>
- #include <avr/interrupt.h>
- #define uchar unsigned char
- #define uint unsigned int
-
- //端口初始化
- void port_init(void)
- {
- PORTA = 0xFF;
- DDRA = 0xFF;
- }
-
- void spi_init(void)
- {
- PORTB |= (1<<4) | (1<<5) | (1<<6) | (1<<7); //
- DDRB |= (1<<5) | (1<<7) | (1<<4); //Set MOSI, SCK AND SS as outputs
- SPCR = 0xE3; //SPI中斷使能,SPI使能,低位首發(fā),從機(jī)模式,時(shí)鐘模式00,上升沿采樣;時(shí)鐘速率Fosc/128
- SPSR = 0x00; //SPI2x=0
- }
-
- void init_devices(void)
- {
- port_init();
- spi_init();
- sei();//開(kāi)全局中斷
- }
-
- //主函;
- int main(void)
- {
- init_devices();
- while(1);
- }
- //SPI中斷函數(shù)
- SIGNAL(SIG_SPI)
- {
-
- PORTA=SPDR;
-
- }
完整的Word格式文檔51黑下載地址:
 SPI.doc
(663.5 KB, 下載次數(shù): 42)
SPI.doc
(663.5 KB, 下載次數(shù): 42)
2018-7-7 10:12 上傳
點(diǎn)擊文件名下載附件
下載積分: 黑幣 -5
| 










 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

