
0.jpg (40.93 KB, 下載次數: 95)
下載附件
2018-5-20 02:43 上傳
全部資料51hei下載地址:
 超聲波測距.zip
(2.58 MB, 下載次數: 133)
超聲波測距.zip
(2.58 MB, 下載次數: 133)
2018-5-19 11:16 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
Arduino示例教程模塊版——超聲波測距實驗超聲波發射器向某一方向發射超聲波,在發射的同時開始計時,超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即停止計時。聲波在空氣中的傳播速度為340m/s,根據計時器記錄的時間t,就可以計算出發射點距障礙物的距離s,即:s=340m/s× t / 2 。這就是所謂的時間差測距法。本實驗利用超聲波測得的距離從串口中顯示。 元器件清單: Zduino UNO × 1;
OJ傳感器擴展板× 1; USB數據線 × 1 ; 1p杜邦線 × 4 ; 超聲波傳感器 × 1;
知識要點:
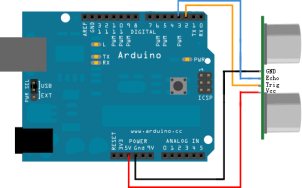
pulseIn():用于檢測引腳輸出的高低電平的脈沖寬度。 pulseIn(pin, value) pulseIn(pin, value, timeout) Pin---需要讀取脈沖的引腳 Value---需要讀取的脈沖類型,HIGH或LOW Timeout---超時時間,單位微秒,數據類型為無符號長整型。 1、使用Arduino采用數字引腳給SR04的Trig引腳至少10μs的高電平信號,觸發SR04模塊測距功能; 2、觸發后,模塊會自動發送8個40KHz的超聲波脈沖,并自動檢測是否有信號返回。這步會由模塊內部自動完成。 3、如有信號返回,Echo引腳會輸出高電平,高電平持續的時間就是超聲波從發射到返回的時間。此時,我們能使用pulseIn()函數獲取到測距的結果,并計算出距被測物的實際距離。 SR04與Arduino接線示意圖: Arduino示例程序:
- /*
- IDE 版本:1.0.1
- 功能:利用SR04超聲波傳感器進行測距,并用串口顯示測出的距離值
- */
- // 設定SR04連接的Arduino引腳
- const int TrigPin = 2;
- const int EchoPin = 3;
- float distance;
- void setup()
- { // 初始化串口通信及連接SR04的引腳
- Serial.begin(9600);
- pinMode(TrigPin, OUTPUT);
- // 要檢測引腳上輸入的脈沖寬度,需要先設置為輸入狀態
- pinMode(EchoPin, INPUT);
- Serial.println("Ultrasonic sensor:");
- }
- void loop()
- {
- // 產生一個10us的高脈沖去觸發TrigPin
- digitalWrite(TrigPin, LOW);
- delayMicroseconds(2);
- digitalWrite(TrigPin, HIGH);
- delayMicroseconds(10);
- digitalWrite(TrigPin, LOW);
- // 檢測脈沖寬度,并計算出距離
- distance = pulseIn(EchoPin, HIGH) / 58.00;
- Serial.print(distance);
- Serial.print("cm");
- Serial.println();
- delay(1000);
- }
連線實物圖:
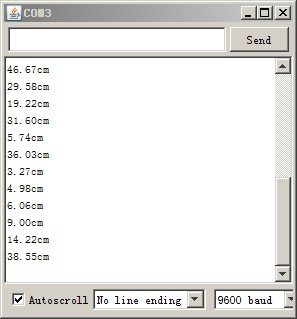
 下載完程序后,打開串口監視器,并將超聲波傳感器對向需要測量的物體,即可看到當前超聲波傳感器距物體的距離,如下圖:
第56講Arduino入門教程實驗16超聲波實驗
1實驗原理 科學家們將每秒鐘振動的次數稱為聲音的頻率,它的單位是赫茲(Hz)。我們人類耳朵能聽到的聲波頻率為20Hz~20000Hz。當聲波的振動頻率小于20Hz或大于 20000Hz時,我們便聽不見了。因此,我們把頻率高于20000赫茲的聲波稱為“超聲波”。由于超聲波指向性強,能量消耗緩慢,在介質中傳播的距離較遠,因而超聲波經常用于距離的測量。
超聲波測距原理:超聲波發射器向某一方向發射超聲波,在發射時刻的同時開始計時,超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即停止計時。超聲波在空氣中的傳播速度為340m/s,根據計時器記錄的時間t,就可以計算出發射點距障礙物的距離(s),即:s=340t/2 。這就是所謂的時間差測距法。
超聲波測距的原理是利用超聲波在空氣中的傳播速度為已知,測量聲波在發射后遇到障礙物反射回來的時間,根據發射和接收的時間差計算出發射點到障礙物的實際距離。由此可見,超聲波測距原理與雷達原理是一樣的。
測距的公式表示為: L=C×T
式中L為測量的距離長度;C為超聲波在空氣中的傳播速度;T為測量距離傳播的時間差(T為發射到接收時間數值的一半)。
這節課我們就介紹一下怎樣使用SR04超聲波模塊來進行距離測量。會用到上節課脈沖計時所學到的知識,通過計算脈沖時常來算出來超聲波傳感器所感知到的距離.
圖4-16-1SR04超聲波模塊參數 2硬件電路 超聲波測距實驗參考表4-16-2。
實驗器件
| 數量 | landzoduino開發板 | 1 | 編程線 | 1 | 杜邦線 | 若干 | 面包板 | 1 | 超聲波模塊 | 1 |
圖4-16-2超聲波測距實驗器件表 圖4-16-3超聲波測距實驗電路圖 3程序設計 測試程序如下: - /****************************************************
- 超聲波測距實驗程序
- 使用超聲波傳感器測距并串口顯示距離值
- This example code is in the public domain.
- ****************************************************/
- const int TrigPin = 8;
- const int EchoPin = 9;
- float cm;
- /****************************************************
- 初始化部分_setup()函數
- ****************************************************/
- void setup()
- {
- Serial.begin(9600);
- pinMode(TrigPin, OUTPUT);
- pinMode(EchoPin, INPUT);
- }
- /****************************************************
- 執行部分_loop()函數
- ****************************************************/
- void loop()
- {
- //低高低電平發一個短時間脈沖去TrigPin
- digitalWrite(TrigPin, LOW);
- delayMicroseconds(2);
- digitalWrite(TrigPin, HIGH);
- delayMicroseconds(10);
- digitalWrite(TrigPin, LOW);
- //將回波時間換算成cm
- cm= pulseIn(EchoPin, HIGH) / 58.0;
- Serial.print(cm);
- Serial.print("cm");
- Serial.println();
- delay(1000);
- }
復制代碼 4實驗操作 1) 按照圖4-16-3將電路連接到landzoduino開發板上。 2) 插上編程線,把程序下載到Landzoduino控制板。 3) 觀察運行情況。 5實驗結果
通過超聲波模塊的收發,可以準確的檢測3米之內事物到超聲波模塊的距離。
6實驗視頻
Arduino連接超聲波傳感器測距
注:方法已經過時,新方法使用timer去計時,請看https://code.google.com/p/arduino-new-ping/
超聲波傳感器適用于對大幅的平面進行靜止測距。普通的超聲波傳感器測距范圍大概是2cm~450cm,分辨率3mm(淘寶賣家說的,筆者測試環境沒那么好,個人實測比較穩定的距離10cm~2m左右,超過此距離就經常有偶然不準確的情況發生了,當然不排除筆者技術問題。)
測試對象是淘寶上面最便宜的SRF-04超聲波傳感器,有四個腳:5v電源腳(Vcc),觸發控制端(Trig),接收端(Echo),地端(GND)

模塊工作原理:
- 采用IO觸發測距,給至少10us的高電平信號;
- 模塊自動發送8個40KHz的方波,自動檢測是否有信號返回;
- 有信號返回,通過IO輸出一高電平,高電平持續的時間就是超聲波從發射到返回的時間.測試距離=(高電平時間*聲速(340m/s))/2;
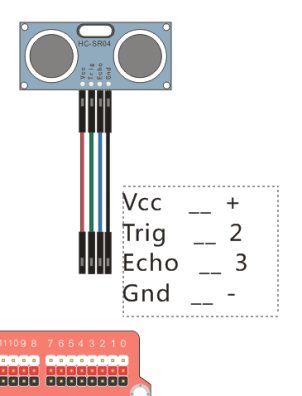
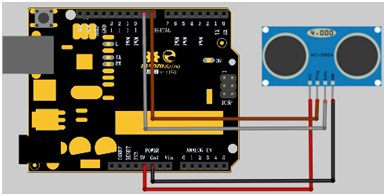
電路連接方法:
Arduino程序例子:
- const int TrigPin = 2;
- const int EchoPin = 3;
- float cm;
- void setup()
- {
- Serial.begin(9600);
- pinMode(TrigPin, OUTPUT);
- pinMode(EchoPin, INPUT);
- }
- void loop()
- {
- digitalWrite(TrigPin, LOW); //低高低電平發一個短時間脈沖去TrigPin
- delayMicroseconds(2);
- digitalWrite(TrigPin, HIGH);
- delayMicroseconds(10);
- digitalWrite(TrigPin, LOW);
- cm = pulseIn(EchoPin, HIGH) / 58.0; //將回波時間換算成cm
- cm = (int(cm * 100.0)) / 100.0; //保留兩位小數
- Serial.print(cm);
- Serial.print("cm");
- Serial.println();
- delay(1000);
- }
Arduino教程(提高篇)——SR04超聲波類庫的使用SR04是最常見的超聲波傳感器之一,價格便宜,好用,是arduino開發的必備良品~

其工作原理如下
- 采用IO觸發測距,給至少10us的高電平信號;
- 模塊自動發送8個40KHz的方波,自動檢測是否有信號返回;
- 有信號返回,通過IO輸出一高電平,高電平持續的時間就是超聲波從發射到返回的時間.距離=(高電平時間*聲速(340m/s))/2;
下面使用的是arduino官方推薦的SR04超聲波傳感器類庫
- 將附件下載后解壓到arduinoIDE下的libraries文件夾即可,如下圖

- #include "SR04.h"
- #define TRIG_PIN 2
- #define ECHO_PIN 3
- SR04 sr04 = SR04(ECHO_PIN,TRIG_PIN);
- long a;
- void setup() {
- Serial.begin(9600);
- Serial.println("Example written by Coloz From Arduino.CN");
- delay(1000);}
- void loop() {
- a=sr04.Distance();
- Serial.print(a);
- Serial.println("cm");
- delay(1000);}
#define TRIG_PIN 2 #define ECHO_PIN 3 |
TRIG接到arduino的第二腳
ECHO接到arduino的第三腳
VCC、GND接上

最后提供一個不用庫直接驅動SR04的程序(上面庫,就是把這個程序封裝了一次)- const int TrigPin = 2;
- const int EchoPin = 3;
- float cm;
- void setup()
- {
- Serial.begin(9600);
- pinMode(TrigPin, OUTPUT);
- pinMode(EchoPin, INPUT);
- }
- void loop()
- {
- //發一個10ms的高脈沖去觸發TrigPin
- digitalWrite(TrigPin, LOW);
- delayMicroseconds(2);
- digitalWrite(TrigPin, HIGH);
- delayMicroseconds(10);
- digitalWrite(TrigPin, LOW);
- cm = pulseIn(EchoPin, HIGH) / 58.0; //算成厘米
- cm = (int(cm * 100.0)) / 100.0; //保留兩位小數
- Serial.print(cm);
- Serial.print("cm");
- Serial.println();
- delay(1000);
- }
| 














 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

