������ӿƼ���W���I�OӋ��Փ�ģ�����ü� �� 1 � �� 47 �
����
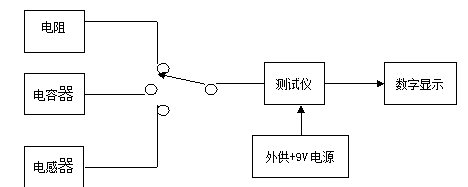
�y�����Ԫ�������Ѕ���R��C��L�ăx���N��^�࣬����Ҳ���в�ͬ���������䃞ȱ�c��һ��Ĝy������������Ӌ����s�������F�ԄӜy�����Һ��y���F���ܻ������yԇ�x�ǰ����Ԫ���ą���R��C��L�D�Q���l����̖f��Ȼ���Æ�Ƭ�CӋ�������\�����R��C��L�������@ʾ���D�Qԭ���քe��RC��ʎ��LC���cʽ��ʎ���@�Ӿ��܉��ģ�M�����Ƶ��D�Qλ�����������l��f�dž�Ƭ�C������̎���Ĕ��������@�N���ֻ���̎��һ�������ʹ�x�팍�F���ܻ���
1 Ӳ���·
1.1 �OӋҪ��
�OӋ������һ�_�����@ʾ����衢��ݺ�늸Ѕ����yԇ�x�����wҪ�����£�
��1���y�����������100

~1M

�����100PF~10000PF��늸�100UH~10mH��
��2���y�����ȣ�

5%������4λ���a���@ʾ�����@ʾ�y����ֵ�����ðl����O�ܷքe֪�R���yԪ������ͺ͆�λ��
��3�������Z�������ܣ���y���Y����6.8K�Wķ�t�Z���������c��K�Wķ���������С��100�Wķ�t�Z���������С��100�Wķ����
1.2 �·����D���f��
ϵ�y�����֣��Ȝy���·��ͨ���x��Ϳ����·����D1.2.1��
�D1.2.1 RLC�y���x�·����D
1.3 �������·�OӋ
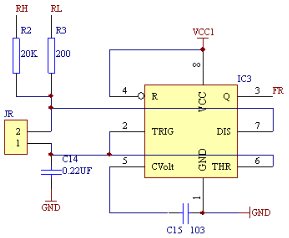
1.3.1 ���y���·
���Ĝy�����á��}�_Ӌ����������D1.3.1��ʾ��555�·���ɵĶ��C��ʎ�·��ͨ�^Ӌ����ʎݔ�����l�ʁ�Ӌ�㱻�y���Ĵ�С��
555�ӳɶ��C��ʎ������ʽ������ʎ���ڞ飺
T=t1+t2=��ln2����R1+Rx��*C1+��ln2��Rx*C1
�õ���Fx=1/[��ln2��(R2+2Rx)C1]����Rx=[1/(ln2)C1-R1]/2
�·�֞�2�n: RH�O�Þ���ƽݔ����RL�O����ƽݔ����
1�� 100��Rx<1000�Wķ��
R3=200�Wķ��C14=0.22uF��
Rx=(6.56*(1e+6))/(2*fx)-330/2
�������l�ʷ����飺2.8K��fx <16K
2�� 1000��Rx<1M�Wķ��
R2=20k�Wķ��C1=103PF��
Rx =(1.443*(1e+8))/(2*fx)-(1e+4)
�������l�ʷ����飺141Hz��fx<6.8K
�D1.3.1 ���y���·
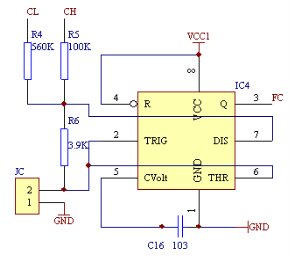
1.3.2 ��ݜy���·
��ݵĜy��ͬ�Ӳ��á��}�_Ӌ����������D1.3.2��ʾ��555�·���ɵĶ��C��ʎ�·��ͨ�^Ӌ����ʎݔ�����l�ʁ�Ӌ�㱻�y��ݵĴ�С��555�ӳɶ��C��ʎ������ʽ������ʎ���ڞ飺
T=t1+t2=��ln2����R1+R2��*Cx+��ln2��R2*Cx
�҂��O��R1=R2;
�õ���Fx=1/[3(ln2)R1*Cx]����Cx=1/[3(ln2)R1*Fx]
�·�֞�2�n:
1�� R1��560K�Wķ��CL�O�Þ���ƽݔ����
R4=R6��
Cx= (0.94*(1e+6))/ fx��
�������l�ʷ����飺9.4K��fx <0.94K��
2�� R1��100K�Wķ�� CH�O�Þ���ƽݔ����
R5=R6��
Cx =(4.81*(1e+6))/ fx;
�������l�ʷ����飺480Hz��fx <4.8K��
�D1.3.2 ��ݜy���·
1.3.3 늸Мy���·
늸еĜy���Dz���������cʽ��ʎ�·�팍�F�ġ����cʽ�·��ָ��LC��·���c�l��O���B�ăɂ�늿�Ԫ�������ͬ���|�ģ�����һ��늿�Ԫ����횞鮐���|�ģ����c�l��O���B�ăɂ�늿�Ԫ��ͬ����ݕr�����cʽ�·���ɞ�������cʽ�·��
Fx=1/(2��

)����Lx=1/( 4��*��*Fx*Fx)
Lx=[38*(1e+6)]/

�D1.3.3 늸Мy���·
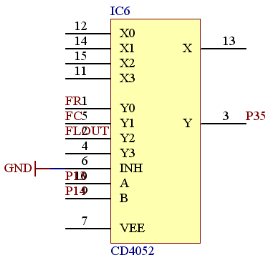
1.3.4 ��·�x���_�P�·
����CD4052���F�y��e���D�Q��CD4052���p4�xһ��ģ�M�_�P�x�����������x����ijһͨ�����l�ʺ�ݔ���l��ͨ�^ͨ�^P35����CPU���r���ĕr�Դ���_ʼӋ������Ӌ����3����x��Ӌ������ֵ������3�͵õ��˱��yR/C/L�������a�����l�ʣ�ͨ�^Ӌ��õ�Ҫ���yֵ��
�D1.3.4 ��·�x���_�P�·
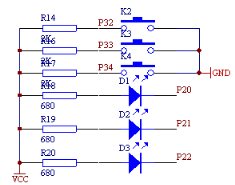
1.3.5 ���I���@ʾ�·
���I�Ͷ��O�ܷքe��ʾ��ͬe�Ĝy�������±���ʾ��
�D1.3.5.1 �y���x���cָʾ�·
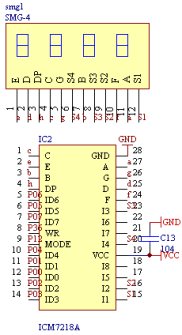
�D1.3.5.2 �@ʾģ�K1
Ӌ���Y����Ҫ�@ʾ�������˂��x���� 74LS390�����߶Δ��a����ʮ�M�Ɣ��@ʾ����ӛ���Y������D��
�D1.3.5.3 �@ʾģ�K2
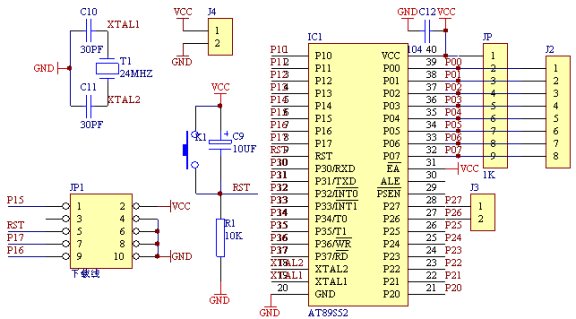
1.3.6 ��Ƭ�Cģ�K
��Ƭ�Cϵ�y�B����D1.3.6��ʾ��
�D1.3.6 ��Ƭ�Cģ�K
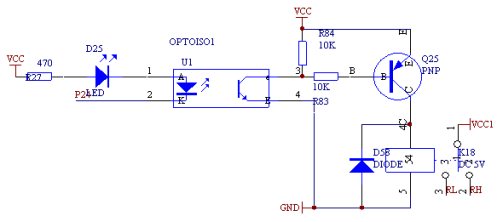
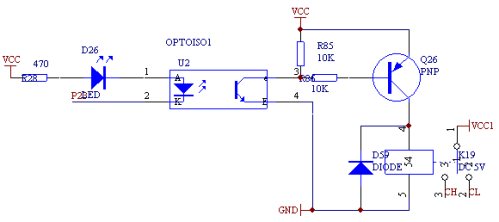
1.3.7 �����x��ģ�K
������������x��ģ�K����������x��ģ�K����D1.3.7.1��1.3.7.2��ʾ��
�D1.3.7.1��������x��ģ�K
�D1.3.7.2 ��������x��ģ�K
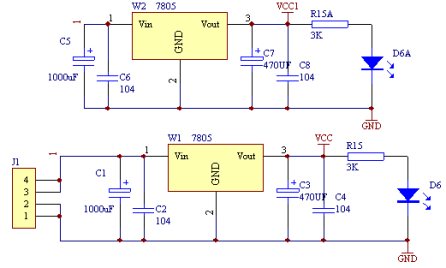
1.3.8 �Դģ�K
�Դģ�K��D1.3.8��ʾ��
�D1.3.8 �Դģ�K
2 ܛ������
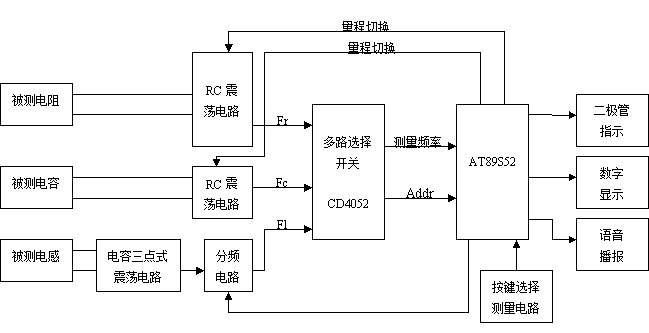
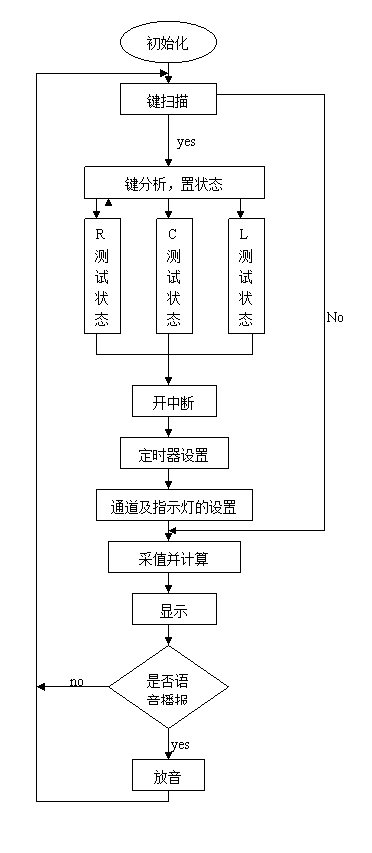
2.1 ���������̈D
��D2.1��ʾ��
�D2.1 ���������̈D
AT89S52��Ƭ�C�Ļ����l��
�҂�֪���������l�V�����s�ڎ�ʮ����ǧ��Ɲ���������ó�������Ɔ�̎�Cij���ھ��ġ��ߡ��ƽ����ƽ���t��ԓ�ھ��Ͼ��ܮa��һ���l�ʵľ��β����������Ⱦ��ܰl��һ���l�ʵ��������������ӕr������ơ��ߡ����͡��ƽ�ij��m�r�g�����ܸ�׃ݔ���l�ʣ��Ķ���׃���{��
���磬Ҫ�a��200HZ�����l��̖��������飺
�����ӳ���DEL���ӕr�ӳ���R3��1�r���ӕr�r�g�s��20us��R3�д���ӕr��������200HZ���l�������ڞ�1/200�룬��5ms���@�ӣ���P1.4�ĸ��ƽ����ƽ�ij��m�r�g��2.5ms����R3�ĕr�g����ȡ2500/20=125(7DH)�r�����ܰl��200HZ�����{���������I��W���C�������m��R3�ij����ܸе����{��׃���������У�ÿһ�����������_�����l�ʡ��x���ܸ�����1�����o�ij���������16�M�ƴ��a����R3�����;����w����������1������������H�@߀����Ҫ�ʴ_���һ�����ӣ���횜ʴ_�ؿ��Ƙ������࣬��һ�����ij��m�r�g��
�����Ĺ����҂����ö��r��T0�����ƣ����벻һ�ӵij�ֵ�����ܮa����һ�ӵĶ��r�r�g������ij�����Ĺ�����ÿ���94�ģ���һ�Ğ�0.64�롣
���ǣ�����T0����r�r�gֻ�ܞ�131���룬��˲�����ֱ���ø�׃T0�ĕr�g��ֵ�팍�F��һ�ӹ��ġ��҂�����T0���a��10����ĕr�g���ʣ�Ȼ���O��һ���Д�Ӌ������ͨ�^�Єe�Д�Ӌ������ֵ�����ƹ��ĕr�g���L�̡���2��Ҳ�o���˸��N�����������ĕr�g���������猦1/4�����������r�r�g��0.16�룬�����ĕr�g������16����10H������3�����������r�r�g��1.92�룬�����r�g�L����192����C0H����
�҂���ÿһ�����ĕr�g�������䌦���Ĺ��ij�������һ�M�����������е����г������г�һ������Ȼ���ɲ����������ȡ�����a�����������ƹ��࣬���܌��F����Ч�������⣬�Y�������wֹ���ܷքe�ô��a00H��FFH����ʾ��������Y����00H���t��ʾ���ӽK�ˣ�������Y����FFH���t�a��������ͣ�DЧ�������ˮa���֏��Ĺ���У���ijЩ����������ɂ���ͬ������������һ���r�g��λ���l�����в�һ�ӵ�������
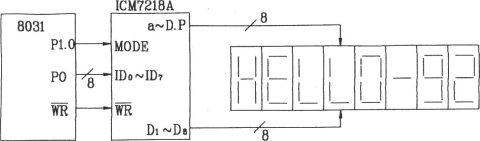
3.3 ICM7218�Y��
ICM72 1 8A��ͨ�Ô��a������ ,���Ʒ�ʽ�����`�� ,�����c8λ̎�����ӿ� .�ɏV���������Դ���x���x�����@ʾ�С�
�D3.3.1
ICM7218A�ɹ��������N�@ʾģ�K�����g�a�@ʾģʽ��ʮ���M���g�a�@ʾģʽ��ʮ�M���g�a�@ʾģʽ�����w�f�����£�
�ڷ��g�aģʽ�£����������֕rID5=��1������ݔ�딵��ֱ�ӿ��ƶ�λݔ����ݔ�딵���Ͷ�λ�@ʾ�������3.3.1��ʾ�����g�aģʽ�£���������ʮID5=��0���������ڌ��������֕r�x���乤����ʮ���M���g�a�@ʾģʽ��ID6=��1������ʮ�M���g�a�@ʾģʽ��ID6=��0������ݔ����M�ƴa�cʮ�M���@ʾ�a��ʮ���M���@ʾ�a�Pϵ���3.3.2��ʾ��
�D3.3.1
�D3.3.2
ICM7218A�Ĺ�����ʽ
ICM7218A��ͨ�^��������ID4λ��Q����������������ʽ��NORMALOPERTION����ֹͣ������ʽ��SHUTDOWN����
������������ʽ�£�ID4=��1��������MODE����ƽ�r����WRITE��̖��Ч�r����̎��������������ID4-ID7λ������������֣��˕rID0-ID3λ�����oЧ��MODE����ƽ�r����WRITE��̖��Ч�r��̎�������Ό���8��8λ�@ʾ�������ڔ��������^���У��@ʾ��ֹͣ������֪��8���������꣬�@ʾ���@ʾ��ݔ��ֵ��
ע1��������������һλ�@ʾ��������������������^�̣���tֱ������һλ�@ʾ�������oЧ��
ע2��ÿ�α���B�mݔ��8��8λ�@ʾ����֮���@ʾ������������������ʹ�@ʾλ������8λҲ���ݔ��8����������8������֮��Ĕ����oЧ��
��ֹͣ������ʽ�£�ID4=��0���������������ֺ��@ʾ��ֹͣ�@ʾ�������·�M��ʡ�c��B��
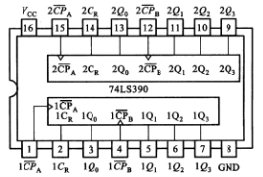
3.4 74LS390�Y��
74LS390���pʮ�M��Ӌ�����������ɂ�2���l�̓ɂ�5���lӋ�������������Ԍ��F2���l��5���lֱ��100���l���κ��ۼӱ�����Ӌ���L�ȣ�74LS390���T�·����ϣ����Ԍ��F�����M�Ɔ�λӋ������
Ӌ���Y��������Ҫ�@ʾ���������˂��x��������Ӌ�����g�a���@ʾ�·ͨ�����ʹ�á�������@���N���ܵ�оƬ�ܶ࣬Ҫᘌ�ʹ��Ŀ���x�ú��m��оƬ�����Ӌ���Y��Ҫ��ʮ�M�Ɣ��@ʾ�������g�a������������ֱ�����߶Δ��a�ܵ��g�a������
��D3.4.1��оƬ74LS390���Ѓɂ�ʮ�M��Ӌ������CR������ˣ����ƽ��Ч���� ��
�� ��CP�}�_��Q0��Q1��Q2��Q3��4��ݔ���������
��CP�}�_��Q0��Q1��Q2��Q3��4��ݔ��������� �|�l��ֻ��Q0��ݔ��������
�|�l��ֻ��Q0��ݔ�������� �|�l���tQ1��Q2��Q3��ݔ����ݔ�����˕rӋ�����ڞ�5������74LS390���Ԍ��F���M�ơ����M��Ӌ���������Q0ֱ���c
�|�l���tQ1��Q2��Q3��ݔ����ݔ�����˕rӋ�����ڞ�5������74LS390���Ԍ��F���M�ơ����M��Ӌ���������Q0ֱ���c ���B����
���B���� ��CP�}�_���t���Ԍ��F8421ʮ�M��Ӌ����
��CP�}�_���t���Ԍ��F8421ʮ�M��Ӌ���� 3.4.1 74LS390���_���ЈD
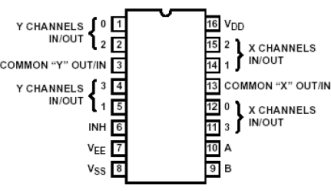
3.5 CD4052�Y��
CD4052��һ���p4�xһ�Ķ�·ģ�M�x���_�P����ʹ����ֵ�����3.5.1��ʾ:
��3.5.1
���Õr����ͨ�^��Ƭ�C��A/B�Ŀ��Ɓ��x��ݔ����һ·�����磺��Ҫ��4·ݔ�����x��ڶ�·ݔ�룬���Oʹ�õ���Y�M����ô��Ƭ�Cֻ��Ҫ�քe�oA��B��1��0�����x��ԓ·��Ȼ���M��������̎����
ע���6�_��ʹ���_��ֻ�О�0�r���ŕ���ͨ�����x��ݔ��.
�D3.5.1 CD4052оƬ���_�D��
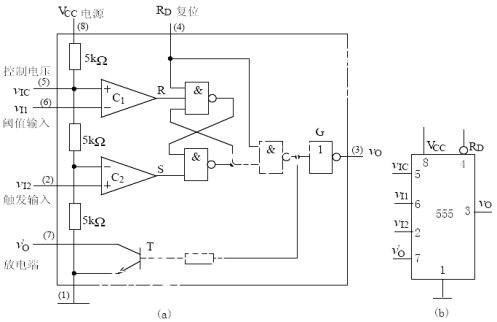
3.6 NE555�Y��
555���r����һ�N���ØO��V������Ҏģ�����·��ԓ�·ʹ���`����㣬ֻ���������������Ԫ���Ϳ��Ԙ��Ɇη������C��ʩ�����|�l��������V��������̖�Įa����׃�Q�������c�z�y��
Ŀǰ���a�Ķ��r�����p�O�ͺ�CMOS�ɷN��ͣ�����̖�քe��NE555(��5G555)��C7555�ȶ�N�������ĽY��������ԭ��������ͬ��ͨ�����p�O�Ͷ��r�������^�������������CMOS ���r�����е��ġ�ݔ���迹�ߵȃ��c��555���r���������Դ늉��܌������ɳ����^���ؓ�d������p�O�Ͷ��r���Դ늉�������5��16V�����ؓ�d������_200mA��CMOS ���r���Դ늉�������3��18V�����ؓ�d�����4mA���¡�
һ���·�M��
�D3.6.1��555���ɶ��r��555���r����늚�ԭ��D���·��̖�������傀���ֽM�ɣ�
��1����������ֵ��5k�� �����M�ɵķ։�����
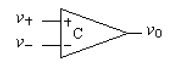 ��2���ɂ�늉����^��C1 ��C2��
��2���ɂ�늉����^��C1 ��C2��V+��V����Vo=1��
V+��V����Vo=0��
��3������RS �|�l����
��4��������O��T �����_��G��
�D3.6.1 555���r����늚�ԭ��D���·��̖
������������
��5�_�ҿՕr�����^��C1��C2�ı��^늉��քe��2Vcc/3��Vcc/3��
��1����V11>2Vcc/3��V23>Vcc/3�r�����^��C1ݔ�����ƽ��C2ݔ�����ƽ������RS�|�l������0��������O��T ��ͨ��ݔ����vO ����ƽ��
��2��V11<2Vcc/3��V23<Vcc/3�r�����^��Cݔ�����ƽ��C2ݔ�����ƽ������RS �|�l������1��������O��T ��ֹ��ݔ����vO ����ƽ��
��3��V11<2Vcc/3��V23>Vcc/3�r�����^�� C1 ݔ�����ƽ��C2Ҳݔ�����ƽ��������RS �|�l��R=1��S=1���|�l����B��׃���·�ౣ��ԭ��B��׃��
�����ֵݔ���(V11)����ƽ��>2Vcc/3���r�����r��ݔ�����ƽ�����Ҳ��ԓ�˷Q����|�l�ˣ�TH����
����|�lݔ���(vI2)����ƽ��< 1Vcc/3���r�����r��ݔ�����ƽ�����Ҳ��ԓ�˷Q����|�l�ˣ�TL����
�����늉����ƶˣ�5�_��ʩ��һ�����늉�����ֵ��0��VCC֮�g�������^���ą���늉����l��׃�����·�������ֵ���|�l�ƽҲ���S֮׃�������M��Ӱ��·�Ĺ�����B��
���⣬RD���λݔ��ˣ���RD����ƽ�r����������ݔ��˵Ġ�B��Σ�ݔ��Vo����ƽ����RD�Ŀ��Ƽ��e��ߡ����������r��һ�㑪����Ӹ��ƽ��
��3.6.1 555���r�����ܱ�
���·��D���ܱ����Եó����½YՓ��
1 555���r���Ѓɂ��ֵ���քe��2Vcc/3��Vcc/3��
2 ݔ����3�_�ͷ�늶�7�_�Ġ�Bһ�£�ݔ�����ƽ������늹�ͣ���7�_������������r��7�_����ƽ��ݔ�����ƽ������늹ܽ�ֹ�������������r��7�_����ƽ��
3 ݔ���ˠ�B�ĸ�׃�М��جF�ز�늉���Vcc/3��
4 ݔ���c�|�lݔ�뷴�ࡣ�����@�ėl��������555���r���M�ɵ��·ʮ��������
555����
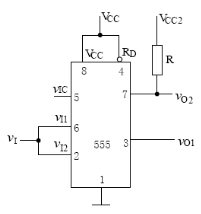
ʩ�����|�l��
ʩ�����|�l���ǔ���ϵ�y�г��õ��·֮һ,������׃���������}�_����׃�Q�ɞ锵���·����Ҫ�ľ����}�_��ʩ�����·�����c������Ҳ�Ѓɂ�������B,���cһ���|�l���ą^�e�����@�ɂ�������B���D�Q��Ҫ����|�l��̖,���ҷ�����B�ľS��ҲҪ��ه������|�l��̖,��������|�l��ʽ���ƽ�|�l����
1���·�M�ɼ�����
ֻҪ��555 ���r����2̖�_��6̖�_����һ�𣬾Ϳ��Ԙ���ʩ�����|�l�����҂���ӛ�顰������һ����
�D3.6.2 555���r�����ɵ�ʩ�����|�l���·�D
��1�� V1=0V �r��Vo1 ݔ�����ƽ��
��2����V1������2Vcc/3�r��Vo1ݔ�����ƽ����V`��2Vcc/3�^�m������Vo1 ���ֲ�׃��
��3����V1�½���Vcc/3�r���·ݔ����׃����ƽ��������V1�^�m�½���0V�r���·���@�N��B��׃��
�D3.6.2�У�R��VCC2 ������һݔ����Vo2������ƽ����ͨ�^��׃Vcc2�M���{����
2��늉��������Ժ���Ҫ����
늉���������
�D3.6.3 ʩ�����|�l�����·��̖��늉���ݔ����
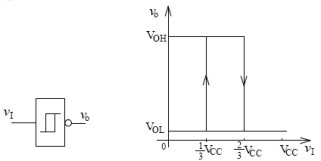
��Ҫ�o�B����
��1�������ֵ늉�VT+----VI�����^���У�ݔ��늉�VO�ɸ��ƽVOH ��׃�����ƽVOL�r����������ݔ��늉�ֵ��VT+ = 2Vcc/3��
��2�������ֵ늉�VT-----VI�½��^���У� VO�ɵ��ƽVOL ��׃�����ƽVOH�r����������ݔ��늉�ֵ��VT�� =Vcc/3��
��3���ز�늉���VT
�ز�늉��ֽМ���늉������x�� :��VT= VT+��VT�� = Vcc/3
����늉����ƶ�VIC��5�_�����늉�VS���t����VT+=VS��VT��=VS/2����VT=VS/2�����Ү���׃VS �r��������ֵҲ�S֮��׃��
3��ʩ�����|�l���đ����e��
(1)�����ӿ��·----������׃����ݔ����̖���D�Q�ɞ����TTLϵ�yҪ����}�_���Ρ�
(2)���������·----�Ѳ�Ҏ�t��ݔ����̖���γɞ�����}�_��
�D3.6.4 ��ݔ�벨�ε�TTLϵ�y�ӿں��}�_�����·��ݔ��ݔ������
��B�|�l��
�η��B�|�l�������������c����һ������һ��������B��һ��������B���ڶ���������|�l�}�_�����£��܉��ɷ�����B���D��������B��������������B�S��һ�Εr�g���Ԅӷ��ص�������B����������B�r�g���L�̣��c�|�l�}�_�o�P�����Q�����·�����ą�����
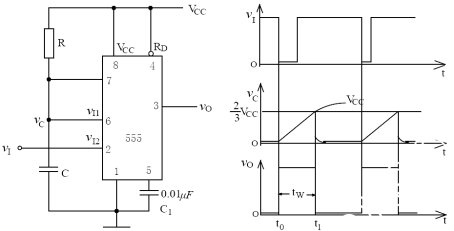
1.�·�M�ɼ��乤��ԭ��
��555���ɵĆη��B�|�l��������������D��ʾ��555��6̖�_��7̖�_����һ�𣬲�����һ����ݺ�һ����� ���Ϳ��Ԙ��Ɇη��B�|�l���҂���ӛ�顰������һ����R��C����
�D3.6.5 ��555���r�����ɵĆη��B�|�l������������
��1���o�|�l��̖ݔ��r�·�����ڷ�����B
���·�o�|�l��̖�r��VI���ָ��ƽ���·�����ڷ�����B����ݔ����VO���ֵ��ƽ��555�ȷ�����O��T͌�ͨ�����_7���ӵء������늉�VC��0V��
��2��VI �½����|�l
��VI�½��ص��_�r��555�|�lݔ��ˣ�2�_���ɸ��ƽ��׃����ƽ���·���|�l��VO�ɵ��ƽ��׃����ƽ���·�ɷ��B�D�땺���B��
��3�������B�ľS�֕r�g
�ڕ����B���g��555�ȷ�����O��T ��ֹ��VCC��R��C��늡����늻�·��VCC��R��C���أ��r�g������1=RC�����늉�VC��0V�_ʼ���������늉�VC�������ֵ늉�2Vcc/3֮ǰ���·�����֕����B��׃��
��4���Ԅӷ��أ������B�Y�����r�g
��VC�������ֵ늉�2Vcc/3�r��ݔ��늉�VO�ɸ��ƽ��׃����ƽ��555�ȷ�����O��T�ɽ�ֹ�D��͌�ͨ�����_7���ӵء������C��������O�܌���Ѹ�ٷ�늣�늉�VC��2Vcc/3Ѹ�ٽ���0V��������O�ܵ�͉��������·�ɕ����B�����D�뷀�B��
��5���֏��^��
�������B�Y�������Cͨ�^͌�ͨ�����O��T��늣��r�g������2=RCESC��ʽ��RCES��T��͌�ͨ��裬����ֵ�dz�С����˦�2ֵ֮��dz�С�����^��3��5����2�����C����ꮅ���֏��^�̽Y����
2. ��Ҫ��������
(1) ݔ���}�_����tw
ݔ���}�_���Ⱦ��Ǖ����B�S�֕r�g��Ҳ���Ƕ��r��ݵij�늕r�g���ɈD��ʾ���늉�VC �Ĺ������β��y����VC��0+����0V��VC���ޣ�=VCC��VC��tw��=2Vcc/3������RC�^���^��Ӌ�㹫ʽ���ɵ�tw=1.1ln3��
��ʽ�f�����η��B�|�l��ݔ���}�_����tw�H�Q���ڶ��rԪ��R��C��ȡֵ���cݔ���|�l��̖���Դ늉��o�P���{��R��C��ȡֵ�����ɷ�����{��tw��
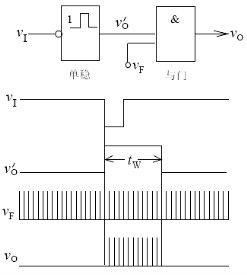
3.�η��B�|�l���đ���
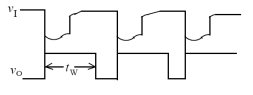
��1���ӕr
�ڈD3.6.6�У� ���½��ر�WI ���½������˕r�gtW�������t�˕r�gtw���η��B�|�l�����@�N�ӕr���ó��������ڕr������С�
���½��ر�WI ���½������˕r�gtW�������t�˕r�gtw���η��B�|�l�����@�N�ӕr���ó��������ڕr������С� ��2�����r
�ڈD3.6.6�У��η��B�|�l����ݔ��늉� �������c�T��ݔ�붨�r������̖����
�������c�T��ݔ�붨�r������̖���� ����ƽ�r���c�T���_��Wo= WF����
����ƽ�r���c�T���_��Wo= WF���� ����ƽ�r���c�T�P�]��Vo����ƽ���@Ȼ�c�T���_�ĕr�g�Ǻ㶨��׃�ģ����džη��B�|�l��ݔ���}�_
����ƽ�r���c�T�P�]��Vo����ƽ���@Ȼ�c�T���_�ĕr�g�Ǻ㶨��׃�ģ����džη��B�|�l��ݔ���}�_ �Č���tw��
�Č���tw�� �D3.6.6 �η��B�|�l�������}�_���ӕr�c���r�xͨ
��3������
�η��B�|�l���܉�Ѳ�Ҏ�t��ݔ����̖VI�����γɞ���Ⱥ͌��ȶ���ͬ�Ę˜ʾ����}�_Vo��Vo�ķ���ȡ�Q�چη��B�·ݔ���ĸߡ����ƽ������tw�Q���ڕ����B�r�g���D3.6.7�džη��B�|�l�����ڲ��ε����ε�һ���������ӡ�
�D3.6.7 �η��B�|�l�����ڲ��ε�����
���C��ʎ�������a�������}�_�����Լ���ʎ��
�ڔ����·��,������Ҫһ�N��������|�l�}�_���܉�a������һ���l�ʺͷ��ȵľ��β����·�����ھ��β��г�������,߀�����S���ĸߴ��C���ɷ�,����҂��Q�@�N�·����C��ʎ���������������}�_��̖Դ�����C��ʎ���]�з��B,ֻ���Ѓɂ������B,���������ص�������,�·���ڃɂ������B֮�g�����D�Q��
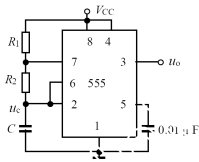
�D3.6.8 ��555���r�����ɵĶ��C��ʎ��
��D3.6.8��555���r�����ɵĶ��C��ʎ������ͨVCC��VCC��R1��R2��C��늡���uc������2VCC/3 �r��uo=0��T��ͨ��Cͨ�^R2��T��늣�uc�½�����uc�½���VCC/3�r��uo����0׃��1��T��ֹ��VCC�ֽ�R1��R2��C��늡�����؏������^�̣���ݔ����uo�a�����B�m�ľ����}�_��
2.��ʎ�l�ʵĹ����ռ�ձȿ��{�·
���C��늕r�g��tw1=0.7(R1+R2)C
���C��늕r�g��tw2=0.7R2C
��ʎ���ڣ�T=0.7(R1+2R2)C
��ʎ���ڣ�f=1/T=1/[0.7(R1+2R2)]=1.43/[(R1+2R2)C]
ռ�ձȣ�D=tw1/T=0.7(R1+R2)C/[0.7(R1+2R2)]=(R1+R2)/(R1+2R2)
3.7 ���4λLED���a���Y��
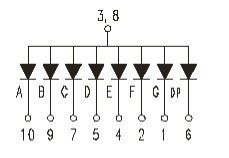
��Ƭ�CI/O�đ�������͵���ͨ�^I/O���c7��LED���a�ܘ����@ʾ�·��7��LED���a�ܣ��t��һ���Π�Ľ^�������ϣ����Æ�ֻLED�M�����гɡ�8�����͵Ĕ��a�ܣ��քe����������늘O���c���������c�����@ʾ��0-9�Ĕ��֡�
LED���a�ܸ���LED�Ľӷ���ͬ�֞鹲ꎺ�ꖃ���˽�LED���@Щ���ԣ��������Ǻ���Ҫ�ģ���鲻ͬ��͵Ĕ��a�ܣ�����������Ӳ���·�в�⣬���̷���Ҳ�Dz�ͬ�ġ���ꎺ�ꖘO���a�ܵİl��ԭ����һ�ӵģ�ֻ���������Դ�O�Բ�ͬ���ѡ�
����ֻLED��ꎘO�B��һ�鹲�ʽ��������ֻLED��ꖘO�B��һ�鹲�ʽ���Թ��ʽ���������ꎘO�ӵأ��������ε�ꖘO�������Դ��ԓ�μ����l�⡣��Ȼ��LED�����ͨ���^С��һ������ڻ�·�н���������衣�����҂���"b"��"c"�ν������Դ�������˽ӵػ�ҿգ���ô"b"��"c"�ΰl�⣬�˕r�����a���@ʾ���@ʾ���֡�1��������"a"��"b"��"d"��"e"��"g"�ζ��������Դ���������_�ҿգ��˕r���a�܌��@ʾ��2���������ַ����@ʾԭ���ͬ�������з�����
���a��ʹ�×l����
a���μ�С���c�ϼ�������裻
b��ʹ��늉����Σ������l���ɫ�Q����С���c�������l���ɫ�Q����
c��ʹ��������o�B�r�����80mA��ÿ��10mA�����ӑB�rƽ�����4-5mA����ֵ���100mA��
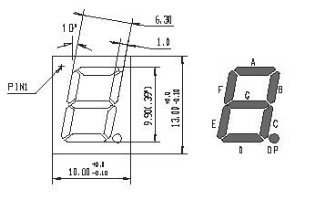
�D3.7.1���߶Δ��a�����_�D�����й�ꖘO���a�����_�D��ꎘO����һ�ӵģ����a��ʹ��ע������f����
��1�����a�ܱ��治Ҫ�����|������Ҫ����ȥŪ���ǣ�
��2�����Ӝضȣ�260�ȣ����ӕr�g��5S��
��3�������б��oĤ�ĮaƷ,������ʹ��ǰ˺����
�D3.7.1 �߶Δ��a�����_�D
3.8 ���O�����P�Y��
9014,9013,8050���O�����_�c���_�R�e����
S9014,S9013��S9015��S9012��S9018ϵ�еľ��wС�������O�ܣ����@ʾ����ƽ�泯�Լ��������������Ξ�e�l��O b���O c��늘O��������С�����������O�ܰ��Dʹ��ƽ�泯���Լ����������_���·��ã��t���������Ξ�e b c,S8050��S8550��C2078 Ҳ�Ǻ��@��һ�ӵġ�
��ǰ�����ȸ��N���w���O���кܶ�N�����_������Ҳ����ͬ����ʹ���в��_�����_���е����O�ܣ�����M�Мy���_�������_���_��λ�ã����������f�ñ�y�����O�ܵ������O�ķ����������_���O�ܵ����Լ������ļ��g�������Y�ϡ�
��9014,9013ϵ�����O�ܹ��_�R�e������
�ж����O�����f�ñ�R��100��R��1k���y����������늘O��ÿ�ɂ��O֮�g�������������ֵ�����õ�һ�����P��ijһ늘O�����ڶ����P�Ⱥ���|����ɂ�늘O���y�õ���ֵ�r���t��һ�����P���ӵ��ǂ�늘O������Ob���@�r��Ҫע���f�ñ����P�ĘO�ԣ�����t���P�ӵ��ǻ��Ob���ڱ��P�քe���������ɘO�r���y�õ���ֵ���^С���t���ж����y���Ӟ�PNP�����O�ܣ�����ڱ��P�ӵ��ǻ��Ob���t���P�քe���|�����ɘO�r���y�õ���ֵ�^С���t���y���O�ܞ�NPN����9013��9014,9018��
�ж����O�ܼ�늘Oc�Ͱl��Oe��(��PNP�����O�ܞ���)���f�ñ�����R��100��R��1K�����t���P���Ob���úڱ��P�քe���|����ɂ����_�r�����y�õăɂ����ֵ����һ����һЩ��һ��СһЩ������ֵС��һ�Μy���У��ڱ��P���ӹ��_�鼯늘O������ֵ�^���һ�Μy���У��ڱ��P���ӹ��_��l��O��
����ж���O���Д���Éĵķ�����
�ڌ��H�����С�С�������O�ܶ�ֱ�Ӻ�����ӡˢ�·���ϣ�����Ԫ���İ��b�ܶȴ�ж���^�韩�������ڙz�y�r����ͨ�^���f�ñ�ֱ��늉�����ȥ�y�����y���Ӹ����_��늉�ֵ�����Ɣ��乤���Ƿ��������M���Д����O�ܵĺÉġ�
������9013 ��9014һ��NPN�����f�ñ�z�y���������_���ڱ��P��һ���O���üt�P�քe�������ɘO���ɂ��O����5K��ֵ�r���ڱ��P���Ӿ���B�O���@�r�úڼt�ɱ��P�քe�������ɘO�������ͬ�r�����䌍Ҳ�����������^���һ����ָȻ������ָȥ�������������l�����ڱ��P�����ǂ��O��B�O����ָʾ��ֵС���ǂ��ڱ����Ӿ���C�O�����������f����ָᘱ����y�����ֱ��t�P�����f�ñ�Ȳ�����ؓ���Ǻ�ָ�����෴�ġ���
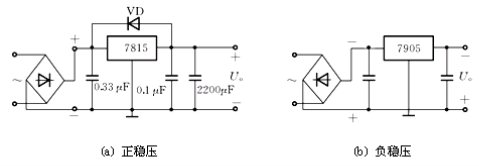
3.9 ���˷�����LM7805�Y��
7805�dz��õ����˷������������˼�x05����ݔ��늉���5v��߀�����{��7805ݔ�����y��С��
(1) �������˷�������������늉�������ؓ�O�Է֞�78������79����ϵ�С��D3.8.1�o��������ؓ�����ĵ����·��
�D3.8.1 ����ؓ����7805�·
(2) ���˷���������̖Ҏ����_�ֲ���
��3.8.1 ���˷�����ݔ�������ĸ��ʾ��
7805���˷�������ݔ��+5 V��0��5 A�ķ���늉���7912���˷�������ݔ�� 12V��1A�ķ���늉���
(3) ���μ����_�ֲ����總�D3.8.2��ʾ����

�D3.8.2 7805,79ϵ�����˷��������_����ݔ���Y��3.10 �^����Y��
늴�ʽ�^����ĽY���c����ԭ��
늴�ʽ�^����Ǒ��õ����硢����һ�N��ʽ����Y��������ԭ���c���|�����w��ͬ����늴�ϵ�y���|�cϵ�y��ጷŏ��ɵȽM�ɣ�늴�ʽ�^���ԭ����Dl��ʾ�������^������ڿ����·�����^�|�c��������^С(һ��5A����)���ʲ���Ҫ�绡�b�á�
���õ�늴�ʽ�^�����늉��^��������g�^���������^�����
늴�ʽ�^���������
�^�������Ҫ������ݔ��-ݔ�����ԣ��ַQ�^����ԡ����^���ݔ����X��������X2��ǰ���^���ݔ����Y���㡣��ݔ����X���ӵ�X2�r���^������ϣ�ݔ������Y1����X�^�m����Y���ֲ�׃����X�pС��X1�r���^���ጷţ�ݔ������Y1׃���㣬��X�^�m�pС��Yֵ�����㡣
Kf��X1/X2�Q���^����ķ���ϵ���������^�����Ҫ��֮һ��Kfֵ�ǿ����{���ġ�
����һ���^���Ҫ��͵ķ���ϵ����Kfֵ����0.1��0.4֮�g���Ӯ��^������Ϻ�ݔ���������^��r���������`������Ƿ늉��^����tҪ��ߵķ���ϵ����Kfֵ��0.6���ϡ��Oij�^���Kf��0.66������늉����~��늉���90�����t늉������~��늉���50���r���^���ጷţ���Ƿ늉����o���á�
��һ����Ҫ���������ϕr�g��ጷŕr�g�����ϕr�g��ָ�ľ�Ȧ�������̖����F��ȫ��������ĕr�g��ጷŕr�g��ָ�ľ�Ȧʧ늵���F��ȫጷ�����ĕr�g��һ���^��������ϕr�g�cጷŕr�g��0.05��0.15s�������^�����0.005��0.05s�����Ĵ�СӰ��^����IJ����l�ʡ�
4 �{ԇ���Y
����y���x�����y��������һ헺���Ҫ��ָ�ˡ�������һЩ�����������`����߾��ȡ�RLC�����y���x�ڜy���г������S�C�`���⣬߀�ЃȲ��̶�ƫ�ơ�ݔ��˵ĸ��N�sɢ�����Լ��yԇ��̖Դ��б�����������������ϵ�y�`���Ҫ�֞��й̶�ƫ�ơ��_·У�ʺͶ�·У�ʡ��S�C�`���̎�����̶�ƫ����Ҫ����Դ���g��Ư������Y���ǵ�Ч�ڴ��y����̖�ϯB����ijһ�̶���ֱ��늉����̶�ƫ�ƿ�ͨ�^�p�����Կ۳����Oһ�������Ĝy���к�8�Μy����ǰ�ĴΜy����X��Y�������Sȡ�ã����ĴΜy���Y���t������X��Y��ؓ���Sȡ�á�Ȼ���ٰ�ǰ�ĴΜy���Y���c���ĴΜy���Y�����p�����磬ͨ����ƫ������M�tǰ�ĴΜy��ֵ�飺N+M�����ĴΜy���Y����-N+M�����p��õ���Ȼ�����������2N���@�Ӿ�������ƫ������RLC�����y���x�Ĝy���ˡ��y�������Լ��y���A�߿��Ǵ��ښ����迹�͚������{���@Щ�����Ɍ�С��ݡ�С늸л�����Ĝy��������^���`�У���Ļ���˼������ͨ�^��Փ��������ϵ�y���`��ģ�ͣ�����o�u������ʽ��Ȼ��ͨ�^���εġ��_·��������·����У�ʼ��gӛ䛸��`�����ӣ�����������������ʽ���`�������Ԅ�Ӌ�������Y���������yӋ������Փ���S���`�����ͨ�^����؏͜y����ƽ��������������ͨ�^���̵ķ�ʽ�����y�����B�m�y����Ȼ����ƽ�����k���������S���`�
�{ԇ֮ǰ��Ҫ�����f�ñ�z�y��һ�龀·�Ƿ����_·���߶�·���ڙz�����·���Bͨ��֮����оƬ����䛳������·�]�������������tҪ�ĸ���������ԭ������оƬ����ݡ��l����O�ܵ�������ؓ�O�Ƿ�匦���Ƿ���̓�����_·�Ͷ�·�F��һ���{ԇ�r���l��ܰl����F���������ܴ_���Դ�Ƿ�������늵�оƬ�����^�f�ñ�z���Űl�F�l����ljĵģ����̓Q�Ϻõİl��ܡ��ڌ����ϳɹ��{ԇ�ó���֮��䛳����Լ��İ��ϣ��s�l�F����λ���a�ܲ����@ʾ�����Ҽm�Y�ھ�����ܛ���Ć��}���·�Ć��}������Ԫ���Ć��}�S��֮���^�����Ų飬�l�F�Ұѹ�ꎵĔ��a�ܮ�����ꖵĽ���ȥ�ˡ��Q�˹�ꖵĔ��a�ܿ��������@ʾ�ˡ��_���·�]���κι����cȱ�ݵĕr���Ұѕr�g�;��������ڃ�������IJ��E�����^���췴�͵ćLԇ�����������ѽ��^����ij������^��ĸĄӣ��M���������龫������C�Z���{ԇ�������y���nj��c����̖�İ��ա�����̖���p���F��ȱһ���ɡ������������һ������̖������һ������̖��Ԓ����KEIL Cܛ������ʾ�ğo������*.HEX�ļ��֛]����ʾ��̖�Ķ�ȱ̎��ֻ�������Լ��������ң��@�������҂��ھ�������ĕr��Ҫע��Ӵη������Ա����ڲ��ҳ�����e�İ�K������̖���ĵط���ͬ���еĕr������Ӱ푵������������ķ����ԣ�����صĕr�Hʹ�����Ĺ��ܛ]��߀�������������ܵČ��F��
5 �YՓ
�����OӋ��һ�N����AT89S52��Ƭ�C��RLC���ܜy���x������Ҫ�������£�
��1���ܾ��_�y������ݡ�늸С����ą���ֵ��
��2�����Ԍ��F���������Ԅ��D�Q���o��˹��x��nλ��
��3�����y��������̖�ķ����^С�r�������Ԅӌ��F����ŴĶ���Ӱ푾��ȡ�
��4��AT89S52���С����T�������ܣ�������F�����C���F��
��5�����r�����Բ����ⲿ�r�ԴӋ�����t���҂�Ӌ����ʎ�·�a���l�� �ṩ�˱���������Ӌ�㾫���^�ߣ����ƺ��Ρ�
�ɴ˿�Ҋ���˜y���x���и߶ȵ����ܻ��ͼ��ɻ����ɾ��_�،�Ԫ���������M�Мy�����@�����Ϯ���y���x���İlչڅ�ݣ��������ЏV韵đ���ǰ����
�� �
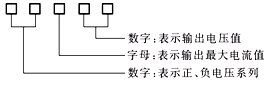
ӡ��PCB�D��
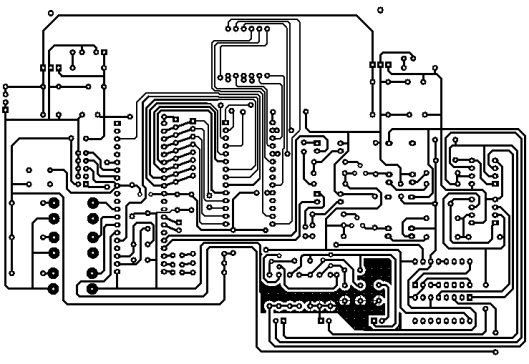
Ԫ��PCB�D��
��Ƭ�CԴ��������:

 ����TQQ:125739409;���g����QQȺ281945664
����TQQ:125739409;���g����QQȺ281945664