|
����܇?y��n)�?�ٶ�Ӌ(j��)���O(sh��)Ӌ(j��) ժҪ�����Ľ�B����89C52��Ƭ�C(j��)�O(sh��)Ӌ(j��)����܇?y��n)�?�ٶ�Ӌ(j��)���\(y��n)�Æ�Ƭ�C(j��)���\(y��n)��Ϳ��ƹ��ܣ������Ô�(sh��)�a�܌�(sh��)�r�@ʾ���y�ٶȺ���̵��ٶ����Ӌ(j��)�O(sh��)Ӌ(j��)�������÷��l��TC4024��(sh��)�F(xi��n)�����l���Á�̽ӑ24C01����������;��ͨ�^��(sh��)���·���O(sh��)Ӌ(j��)�������ٶȼ���̂�������ʹ�÷�����һЩ���܅���(sh��)����ϵ�y(t��ng)��������·���g(sh��)���Լ����õ�AT89C52��Ƭ�C(j��)����ԭ����ͨ�^��ϵ�y(t��ng)���O(sh��)Ӌ(j��)���������z���ЙC(j��)�Y(ji��)�ϡ� The Odometer/Speedometer��s Design Of The Bike Abstract: This article introduced used the Micro Computer Unit of the AT89C52 design The Odometer/Speedometer��s Of The Bike, it utilizes Micro Computer Unit's operation and control function, and it uses the nixietube real time display to measure the speed and the course speed hodometer design proposal, it realizes two frequency divisions with the frequency divider of TC4024,it uses for to discuss the 24C01 sensor's use, through the practical electric circuit's design it grasps the odometer/speedometer��s application method and some performance parameter��This system contains the electronic circuit technology, as well as the commonly used AT89C52 Micro Computer Unit's work principle, through this system's design, which pairs them organic union��
Ŀ � 1 �w Փ 2 AT89C52��Ƭ�C(j��) 2.1 at89C52��Ƭ�C(j��)���� 2.2 at89C52�Ĺ��_���京�x 3 TC4024 4 24C01оƬ 4.1 24C01���� 4.2 24C01�����ԣ� 5 Ӳ���·���O(sh��)Ӌ(j��) 5.1 ϵ�y(t��ng)Ӳ���· 5.2 ϵ�y(t��ng)�Ĺ���ԭ�� 6 ܛ���O(sh��)Ӌ(j��) 6.1 ϵ�y(t��ng)��(n��i)���Ҏ(gu��)�� 6.2 ϵ�y(t��ng)����Ҫ�����O(sh��)Ӌ(j��) 9 7 ϵ�y(t��ng)�{(di��o)ԇ 7.1 Ӳ���{(di��o)ԇ 7.2 ܛ���{(di��o)ԇ 8 �Y(ji��) Փ ���x ���: ϵ�y(t��ng)����Դ����
1 �w Փ��������Ӣ�����֞�Sensor��Transducer����Q�Q������׃�Q�����ڿƼ�Ѹ�ٰl(f��)չ�Ľ��죬������Խ��������ҕ�����ճ�������졢���գ���Ҏ(gu��)��������ͨ�\(y��n)ݔ���C(j��)е���졢�����������t(y��)�W(xu��)���̡��Ԅӻ��z�y���̼�Ӌ(j��)���ȸ��(xi��ng)�I(l��ng)���V����(y��ng)��[6]�� Ŀǰ�������������²����_�l(f��)�����ɻ������ܻ�����(sh��)�ֻ����¹�ˇ���߾��Ȼ����߷�(w��n)�����߿ɿ����ȼ��g(sh��)�l(f��)չ���e�ǻ������������b�����ăr��������ʹ�ã�ʹ���V���\(y��n)�������Ӌ(j��)���ٶ�Ӌ(j��)��[6]�� ��Ƭ��Ӌ(j��)��C(j��)���Q��Ƭ�C(j��)���ַQ���������e�m���ڿ����I(l��ng)��ͨ����Ƭ�C(j��)�ɆΉK�����·��(g��u)�ɣ���(n��i)��������Ӌ(j��)��C(j��)�Ļ���������CPU������̎���������惦����I/O�ӿ��·�ȡ���ˣ���Ƭ�C(j��)ֻ��Ҫ�c�m��(d��ng)?sh��)�ܛ�����ⲿ�O(sh��)����Y(ji��)�ϣ�����Գɞ�һ����Ƭ�C(j��)����ϵ�y(t��ng)[4]�� Ŀǰ�������N�۵Ć�Ƭ�C(j��)��4λ��8��16λ��32λ�����҆�Ƭ�C(j��)���������ܶ�N����l(f��)չ��������8λ��Ƭ�C(j��)�Խ�(j��ng)�ɞ鮔(d��ng)ǰ��Ƭ�C(j��)����������Ҫ�w�F(xi��n)��CPU��������(qi��ng)����(n��i)���YԴ���ࡢ���_�Ĺ��ܻ�����늉��͵��úĻ���[4]�� ��Ƭ�C(j��)��?y��n)����w�eС������(qi��ng)���ɿ��Ըߣ��`���ȃ�(y��u)�c(di��n)�����Կ������ڸ����I(l��ng)�����и��I(y��)�ļ��g(sh��)����ͮa(ch��n)Ʒ����?li��n)Q������Ҫ���Ƅ����á� ���˽�(j��ng)�^�W(xu��)��(x��)����AT89C52�O(sh��)Ӌ(j��)��һ������܇?y��n)�?�ٶ�Ӌ(j��)�����O(sh��)Ӌ(j��)��݆���@ʾ����܇��ʹ����̺��ٶ�, ����TC4024оƬ����Ӌ(j��)��(sh��)���Լ�2C401�惦��(sh��)��(j��)��3���μ���ꎔ�(sh��)�a�������@ʾϵ�y(t��ng)����ϵ�y(t��ng)���г���������ѹ��ܣ���̔�(sh��)��(j��)�Ԅ�ӛ����Ҳ�ɑ�(y��ng)����늄�����܇��Ħ��܇����܇�șC(j��)��܇�x���ϡ�
.
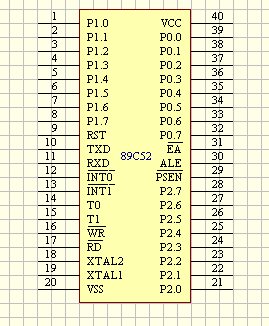
2 AT89C52��Ƭ�C(j��)2.1 AT89C52��Ƭ�C(j��)�������O(sh��)Ӌ(j��)�x��AT89C52��Ƭ�C(j��)��AT89C52��һ�N���ġ�������CMOS 8λ��������ʹ��Atmel ��˾���ܶȷ���ʧ�Դ惦�����g(sh��)���죬���c���I(y��)AT89C51 �a(ch��n)Ʒָ������_��ȫ���ݡ� 2.2 AT89C52�Ĺ��_���京�x[5]AT89C52�Ĺ��_�������_���x���£� �D2.2 89C52���_�D �����_�����f���� VCC�����Դ늉���
GND�����ӵأ�
P0�ڡ���P0����һ�M8λ©�O�_·���p��I/O�ڣ�Ҳ����ַ/��(sh��)��(j��)������(f��)�ÿڡ�����ݔ�����Õr��ÿλ����������ķ�ʽ�(q��)��8��TTL߉�T�·�����˿�P0����1���r����������迹ݔ����ã�
���L���ⲿ��(sh��)��(j��)�惦�������惦���r���@�M�ھ��֕r�D(zhu��n)�Q��ַ����8λ���͔�(sh��)��(j��)������(f��)�ã����L�����g�����(n��i)��������裻
��FLASH���̕r��P0�ڽ���ָ���ֹ�(ji��)�����ڳ���У�(y��n)�r��ݔ��ָ���ֹ�(ji��)��У�(y��n)�r��Ҫ�����������裻
P1�ڡ���P1����һ������(n��i)����������8λ�p��I/O�ڣ�P1��ݔ�����_�����(q��)�ӣ����ջ�ݔ�������4��TTL߉�T�·�����˿ڌ���1����ͨ�^��(n��i)�����������Ѷ˿��������ƽ���˕r����ݔ���ڡ���ݔ���ʹ�Õr����?y��n)�?n��i)������������裬ij�����_���ⲿ��̖���͕r��ݔ��һ�������
�cAT89C51��֮ͬ̎�ǣ�P1.0��P1.1߀�ɷքe���鶨�r/Ӌ(j��)��(sh��)��2���ⲿӋ(j��)��(sh��)ݔ�루P1.0/T2����ݔ�루P1.1/T2EX����
FLASH���̺ͳ���У�(y��n)���g��P1���յ�8λ��ַ��
P1.0��P1.1�ĵڶ�������
P1.0 T2�����r/Ӌ(j��)��(sh��)��2�ⲿӋ(j��)��(sh��)�}�_ݔ�룩���r�ݔ�� ��
P1.1 T2EX�����r/Ӌ(j��)��(sh��)2���@/���b�d�|�l(f��)�ͷ�����ƣ���
P2�ڡ���P2��һ������(n��i)����������8λ�p��I/O�ڣ�P2��ݔ�����_�����(q��)�ӣ����ջ�ݔ�������4��TTL߉�T�·�����˿�P2����1����ͨ�^��(n��i)�����������Ѷ˿��������ƽ���˕r����ݔ��ڣ���ݔ���ʹ�Õr����?y��n)�?n��i)������������裬ij�����_���ⲿ��̖���͕r��ݔ��һ�������
���L���ⲿ����惦����16λ��ַ���ⲿ��(sh��)��(j��)�惦���r��P2���ͳ���8λ��ַ��(sh��)��(j��)�����L��8λ��ַ���ⲿ��(sh��)��(j��)�惦���r��P2��ݔ��P2�i�����ă�(n��i)�ݣ�
FLASH���̻�У�(y��n)�r��P2����ո�λ��ַ��һЩ������̖��
P3�ڡ���P3����һ�M���Ѓ�(n��i)����������8λ�p��I/O�ڡ�P3��ݔ�����_�����(q��)�ӣ����ջ�ݔ�������4��TTL߉�T�·����P3�ڌ��롰1���r����������(n��i)������������߲�������ݔ��˿ڡ��˕r�����ⲿ���͵�P3�ڌ����������ݔ�������
P3�ڳ�������һ���I/O�ھ��⣬����Ҫ����;�����ĵڶ����ܣ�
P3.0 RXD(����ݔ���)
P3.1 TXD(����ݔ����)
P3.2 INTO(����0)
P3.3 INT1(����1)
P3.4 TO(���r/Ӌ(j��)��(sh��)��0)
P3.5 T1(���r/Ӌ(j��)��(sh��)��1)
P3.6 WR(�ⲿ��(sh��)��(j��)�惦�����xͨ)
P3.7 RD(�ⲿ��(sh��)��(j��)�惦���x�xͨ)
���⣬P3��߀����һЩ����FLASH�W�澎�̺ͳ���У�(y��n)�Ŀ�����̖��
RST������(f��)λݔ�롣��(d��ng)��ʎ�������r��RST���_���F(xi��n)�ɂ��C(j��)���������ϸ��ƽ���dž�Ƭ�C(j��)��(f��)λ��
ALE/PROG������(d��ng)�L���ⲿ�̴惦����(sh��)��(j��)�惦���r��ALE����ַ�i�����S��ݔ���}�_�����i���ַ�ĵ�8λ�ֹ�(ji��)��һ����r�£�ALE���ԕr���ʎ�l�ʵ�1/6ݔ���̶����}�_��̖��������Ɍ���ݔ���r犻����ڶ��rĿ�ġ�Ҫע����ǣ�ÿ��(d��ng)�L���ⲿ��(sh��)��(j��)�惦���r�����^һ��ALE�}�_��
��FLASH�惦���������g��ԓ���_߀����ݔ�뾎���}�_��PROG����
EA�˞���ƽ����Vcc�ˣ���CPU�t��(zh��)�Ѓ�(n��i)������惦����ָ� 3 TC4024���������TC4024оƬ������һ��7λ��Ӌ(j��)��(sh��)����Ӌ(j��)��(sh��)�����з��l�����ã���������14�����_����7�_�ӵأ�14�_��+5V��1�_��AT89C52��INT0����12�_,��ϵ�y(t��ng)�д�оƬ���˶����l�����á� 4 24C01оƬ4.1 24C01����24C01��һ��1Kλ����CMOS EEPROM����(n��i)������128��8λ�ֹ�(ji��)��CATALYST�����M(j��n)CMOS���g(sh��)��(sh��)�H�Ϝp���������Ĺ��ģ�24C01��һ��8λ�ֹ�(ji��)퓌����_����ԓ����ͨ�^I2C�����ӿ��M(j��n)�в���������оƬ����I2C�f(xi��)�h�M(j��n)���x����(sh��)��(j��)����һ�����T�Č����o(h��)���ܡ� 24C01��I2C�ӿڵģ�����(bi��o)��(zh��n)51�Dz���I2C�ӿڵģ����ڷ�ʽ0�Dz��еģ���Ҫ��IOģ�M�������S��Ӄɂ�IO�����ԣ����Ҷ�Ҫ��������裬��Ŏ�K�����ˣ���?y��n)鲻�ǿ�����ʽ�����Բ�����MOVָ�Ҳ������SBUF��Ҫ�Д��Ƿ��M�������ڳ������O(sh��)��׃���� ���@��Ҫע��E2PоƬ�ĉ�����һ�����x��100�f�Σ�����ˣ��� �惦��(sh��)��(j��)�ĕr���Ԍ�������(sh��)�ʹ惦�Ĕ�(sh��)��(j��)�M(j��n)�б��^������Ȅt�惦���@�ӿ�������ʹ�É���������Щÿ��1����M(j��n)�д惦�ĕ��ö��ˡ�������24C01�Ĺ��_�D�� 
�D4.1���_�D ��3.1 24C01�Ĺ��_���� 4.2 24C01�����ԣ�24C01оƬ�����������ԣ� - �c400KHZ��I2C�������ݣ�
- +1.8-6.0V����늉�������
- ����CMOS���g(sh��)��
- �����o(h��)���ܣ���(d��ng)WP����ƽ�r�M(j��n)�댑���o(h��)��B(t��i)��
- 퓌����_����
- �Զ��r�������ڣ�
- 1��000��000���̲���/���ڣ�
- �ɱ��攵(sh��)��(j��)100�ꣻ
- 8�_DIP��SOIC��TSSOP���b��
10 �ضȷ������̘I(y��)�������I(y��)������܇���� 5 Ӳ���·���O(sh��)Ӌ(j��)5.1 ϵ�y(t��ng)Ӳ���·����܇?y��n)�?�ٶ�Ӌ(j��)���Ԅ��@ʾ����܇���Ŀ���̔�(sh��)����܇�ٶȣ����г���������ѹ��ܣ���̔�(sh��)��(j��)�Ԅ�ӛ����Ҳ�ɑ�(y��ng)����늄�����܇��Ħ��܇����܇�șC(j��)��܇�x���ϡ���Ӳ���·ԭ��D��D5.1�� 
�D 5.1ϵ�y(t��ng)ԭ��D 5.2 ϵ�y(t��ng)�Ĺ���ԭ�����O(sh��)Ӌ(j��)�܌�(sh��)�r�،����y���ٶ��c��Ӌ(j��)��̔�(sh��)�@ʾ����,��Ҫ�nj�24C01������ݔ�뵽��Ƭ�C(j��)���}�_��̖�����l�ʌ�(sh��)�r�y��������Ȼ��ͨ�^��Ƭ�C(j��)Ӌ(j��)����ٶȺ����,�ٌ����õĔ�(sh��)��(j��)�惦��TC4024оƬ�У�ͨ�^AT89C52��Ƭ�C(j��)Ӌ(j��)��������ٶȺ���̵Ĕ�(sh��)��(j��)�����ͨ�^BCD�a���D(zhu��n)�Q����ݔ���o��(sh��)�a�ܡ�����ɹ�ꎔ�(sh��)�a���@ʾ���y�ٶ��c��̡� ����܇?y��n)�?�ٶ�Ӌ(j��)����AT89C52��Ƭ�C(j��)�����ƣ��ٶȼ���̂��������û���Ԫ���������ԭ��D��D5.1��ʾ��P0�ں�P2�������߶�LED�@ʾ���Ķδa������ݔ�������@ʾ��̕r������λС��(sh��)�c(di��n)��17�_P3.7�ڿ����c(di��n)����P1.0��P1.1�ڷքe�����@ʾ��̠�B(t��i)���ٶȠ�B(t��i)��P1.2�� P1.3�� P1.6�� P1.7�ڷքe�����O(sh��)��݆Ȧ�Ĵ�С��P3.0�ڵ��_�P(gu��n)���ڴ_���@ʾ�ķ�ʽ����(d��ng)�_�P(gu��n)�]�ϕr���@ʾ�ٶȣ����_�r�@ʾ��̡���12�_���Д�0���ڌ�݆��Ȧ��(sh��)��Ӌ(j��)��(sh��)ݔ�룬݆��ÿ�D(zhu��n)һȦ������������ݔ��һ�����ƽ�}�_����13�_���Д�1���ڿ��ƶ��r��T1�Ć�ͣ����(d��ng)ݔ���0�r�P(gu��n)�]���r�����˿�����̖�nj�݆��Ȧ��(sh��)��Ӌ(j��)��(sh��)�}�_��(j��ng)�����l���γɣ�Ҋ�D5.1�����@�ӣ�ÿ�ζ��r��T1���_���r�g���Þ��D(zhu��n)һȦ�ĕr�g������(j��)݆�ӵ����L�Ϳ���Ӌ(j��)�������܇���ٶȡ�P1.4��P1.5������EEPROM�惦��24C01�Ĵ�ȡ���ơ�11�_ݔ�������ٶȳ��ٕr�Ĉ�(b��o)���� 6 ܛ���O(sh��)Ӌ(j��)6.1 ϵ�y(t��ng)��(n��i)���Ҏ(gu��)�����ڱ�ϵ�y(t��ng)̎�������^�࣬���һ���փ�(n��i)���Ԫ�����ض�����̎������ Ҫ��(n��i)���Ԫ��̎���£� 50H:EEPROM������ַ�ֹ�(ji��)��ņ�Ԫ�� 51H:EEPROM�����ֹ�(ji��)��(sh��)��ņ�Ԫ�� 30H:EEPROM�l(f��)�͔�(sh��)��(j��)���_��Ԫ�� 40H:EEPROM�x����(sh��)��(j��)��ņ�Ԫ�� 0A0H:EEPROM��ַ�ֹ�(ji��)�ֹ�(ji��)���� 0A1H:EEPROM��ַ�ֹ�(ji��)�ֹ�(ji��)�x�� 62 H:DPTRӋ(j��)��(sh��)���U(ku��)չ��8λ�� 6C H:���r��T1Ӌ(j��)��(sh��)���U(ku��)չ��8λ�� 6D H:���r��T1Ӌ(j��)��(sh��)���U(ku��)չ��8��16λ�� 60 H��61 H��62 H�����Ӌ(j��)��(sh��)��Ԫ�� 68 H��69 H��6A H��6B H���������܇ÿȦ�r�g��(sh��)�� 70 H��71 H��72 H��73 H���@ʾBCD�a��(sh��)��(j��)����ã� 11 H��15 H����ű�����(sh��)�� 16 H��19 H����ų���(sh��)�� 6.2 ϵ�y(t��ng)����Ҫ�����O(sh��)Ӌ(j��)1. ��ʼ������ �ڱ�ϵ�y(t��ng)��ʼ�������У���Ҫ������¹�������T1�O(sh��)���ⲿ���ƶ��r����ʽ�����Д�0�����Д�1�O(sh��)��߅���|�l(f��)��ʽ�������փ�(n��i)���Ԫ���㣻�O(sh��)��݆�� ���Lֵ���_�Д༰���r������EEPROM�еĔ�(sh��)��(j��)�{(di��o)���(n��i)��ȡ� 2. ݆Ȧ�O(sh��)�ó��e̎������ P1.2�� P1.3�� P1.6��P1.7�˿ڵ��_�P(gu��n)�����O(sh��)��݆�ӵ����L����(d��ng)�]���O(sh��)���r������һ���_�P(gu��n)�]�ϣ�����P3.1��ݔ��һ�����ڞ�0.5S�ķ�����̖�������l(f��)����W�q����������ѡ� 3. ������ ���������(j��)P3.0���_�P(gu��n)��B(t��i)�x����̻��ٶ��@ʾ�������̈D��D6.2��ʾ�� 
�D6.2 ���������̈D 4.���Ӌ(j��)��(sh��)�������Д�0����(w��)���� ���Д�0����(w��)�������ڌ�12�_ݔ���Ȧ�}�_�M(j��n)��Ӌ(j��)��(sh��)����ʮ���M(j��n)��Ӌ(j��)��(sh��)����60H���λ��62H���λ��ÿӋ(j��)��(sh��)һ�κ���̔�(sh��)��(j��)�M(j��n)��һ�δ惦������ 5.���Д�1����(w��)���� ���Д�1����(w��)��������̎��݆���D(zhu��n)��һȦ��Ӌ(j��)�r��(sh��)��(j��)����(d��ng)��(bi��o)־λ��00H����1�r���f��Ӌ(j��)��(sh��)��������������r�gֵ����#0FFH��;��(d��ng)��(bi��o)־λ��0�r����Ӌ(j��)��(sh��)��Ԫ��TL1��TH1��6CH��6DH����ֵ����68H��6BH��Ԫ�� 6.EEPROM��ȡ���� ��ϵ�y(t��ng)ʹ�Úwһ��I2C���ڴ�ȡ�ӳ���ʹ��һ�l��(sh��)��(j��)���͕r犾�������ATMEL��˾��24C01���ڴ惦������(y��ng)�ú��η��㡣 7.�@ʾ�ӳ��� ��(d��ng)�@ʾ��̕r����Ҫ��Ȧ��(sh��)Ӌ(j��)��(sh��)���еĔ�(sh��)��(j��)�M(j��n)���\(y��n)�㣬�������̡���(d��ng)Ҫ �@ʾ�ٶȕr��Ҫ��݆�ӵ��@���L���D(zhu��n)һȦ�ĕr�g��(sh��)�����Ȼ��Q���Km/h��λ��������70H��73H,�M(j��n)�Д�(sh��)��(j��)�@ʾ�� 7 ϵ�y(t��ng)�{(di��o)ԇҪ���һ���a(ch��n)Ʒ���O(sh��)Ӌ(j��)���кܶ༊����(f��)�s�IJ��E���^�̣����������Ҫ ������P(gu��n)�I�ľ���ϵ�y(t��ng)�{(di��o)ԇ���{(di��o)ԇ�IJ��E�ͷ����кܶࡣ����Ҳ���^���٣����@��ϵ�y(t��ng)�{(di��o)ԇ�����{(di��o)ԇ���^���ҳ�ֵİl(f��)�]�˷����������á�
7.1 Ӳ���{(di��o)ԇӲ���ĺ�����һ�����^�������^�̣������ĵط�����3����(li��n)��(sh��)�a�ܵ� �B�ӣ���·�^�࣬�ں��ӕrҪ�e�ļ�(x��)�ģ��ں�����ɲ��������֮��ͨ늰l(f��)�F(xi��n)��(sh��)�a�ܲ������z���˺Îױ飬�·�o���]���e�`�������Ҿ͑��ɿ����ǔ�(sh��)�a�ܵĆ��}����ȥؐ�����W(xu��)Ժ����F(tu��n)���yԇ�]���}����(sh��)�a�ܲ��]�П��ġ� �ڲ���оƬ�rҪ�eע�ⲻ�ܰ�оƬ�巴����t�͕���оƬ������ҲҪ ע��O����ݵķ����L���_�������̵Ğ�ؓ(f��)�����ܰ�ؓ(f��)�Ľ�+5V�����Ľӵأ��ں������O�ܕrҲҪע�����������_���Ų���߀�О鱣�o(h��)���O�ܲ������Q������3�����O��Ҫ���Խ�һ��������裨�@���4.7K���� 7.2 ܛ���{(di��o)ԇܛ���{(di��o)ԇ���{(di��o)ԇ�����c(di��n)��ͬ�rҲ�dz��e���ĵط���������ܛ���{(di��o)ԇ�{(di��o)ԇ�^�����Ҳ�ȡ�Ȳ��ֺ����w���{(di��o)ԇ������ ����������ľ����{(di��o)ԇ�^�����������{(di��o)ԇ���ǔ�(sh��)�a���@ʾϵ�y(t��ng)������Ҿ���������һ�γ������ڔ�(sh��)�a���@ʾ�{(di��o)ԇ��Ҫ��(sh��)�a���@ʾ0��1��2�� ORG 0000H MAIN: MOV P2, #0FFH MOV P0, 0C0H MOV P2, #0FEH ACALL DELAY1 MOV P2, #0FFH MOV P0, 0F9H MOV P2, #0FDH ACALL DELAY1 MOV P2, #0FFH MOV P0, 0A4H MOV P2, #OFBH MOV P2, #0FFH AJMP MAIN DELAY1: MOV R6, #02H AGAIN: MOV R7, #8FH DELAY: DJNZ R7, DELAY DJNZ R6, AGAIN RET END �Y(ji��)����(sh��)�a�����_�@ʾ��0��1��2�@������(sh��)���@ʾϵ�y(t��ng)�{(di��o)ԇ�ɹ��� ܛ���yԇҪע��һ���c(di��n)�� 1.�ھ���I2C���Кwһ���惦�ӳ���r���������c(di��n)�e����(j��ng)�^����{(di��o)ԇ���\(y��n)�����_�� 2.���/�ٶȿ��Ƴ�����ϵ�y(t��ng)��������c(di��n)����������(d��ng)ȻҲ��ܛ���{(di��o)ԇ�����c(di��n)�� 3.�@ʾϵ�y(t��ng)������{(di��o)ԇ�� 4.���f��ܛ���M(j��n)�з���rҪ������������{(di��o)ԇ���ܡ� 8 �Y(ji��) Փ���O(sh��)Ӌ(j��)���Ԅ��@ʾ����܇���Ŀ���̔�(sh��)����܇�ٶȣ����г�����푈�(b��o)�������Լ���̔�(sh��)��(j��)�Ԅ�ӛ���Ĺ��ܣ�Ҳ�ɑ�(y��ng)����늄�����܇��Ħ��܇����܇�șC(j��)��܇�ăx���ϡ����ڱ�ϵ�y(t��ng)���õ��DŽӑB(t��i)����LED�@ʾ�ҹ�ꎔ�(sh��)�a�ܵ��(q��)��������Ǻܴ����Ԕ�(sh��)�a�ܵ��@ʾ�����e����������ͨ�^���QС�c(di��n)������������(q��)�����������(q��)��������ܳ��^20������ʹ��(sh��)�a��׃�ø�����
���x���ȣ���Ҫ���x�Ώ�(f��)���ώ��ڱ��ή��I(y��)�O(sh��)Ӌ(j��)�У����ώ������䟩��ָ��(d��o)�ң����������I(y��)�O(sh��)Ӌ(j��)�����^���У�ʹ�����چ�Ƭ�C(j��)����ļ��ܵõ����M(j��n)һ����ߡ����ώ��o����ȫ�̵Ď������Ą��cָ��(d��o)���ڴ��ұ�ʾ���ĵĸ��x��ͬ�r���x����֥�ώ��ڸ�����o��Ď�����ʹ���܉���һ�����õĭh(hu��n)�����������n���O(sh��)Ӌ(j��)�r���ώ�߀�������M(f��i)�ṩ�����������ģ����Ҹ��õ���ɱ�ϵ�y(t��ng)���O(sh��)Ӌ(j��)�ṩ���țQ�l���� ���⣬��߀Ҫ���x�ҵĸ�ĸ���]��������֧�֣����ǟo������@��ϵ�y(t��ng)�O(sh��)Ӌ(j��)�ģ������o���ҵģ��Ҍ���һ����Ŭ���؈�(b��o)�����ġ� �����߀Ҫ���x����߅��ͬ�W(xu��)�����ѣ�����Ҳ�o���Һܴ�Ď�����
���: ϵ�y(t��ng)����Դ����
�����ǿ���ϵ�y(t��ng)����Դ���� - <font color="rgb(0, 0, 0)"><font color="rgb(0, 0, 0)">;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;; SPEED/MILE OR IKE PROGRAM ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;
- ;
- ; 60H��61H��62H�����Ӌ(j��)��(sh��)��Ԫ��6CH��6DH��T1Ӌ(j��)��(sh��)�U(ku��)���Ԫ��
- ; 68H��69H��6AH��6BH�������܇ÿȦ�r�g��(sh��)��70H��71H��72H��73H
- ; ���@ʾBCD�a��Ŕ�(sh��)�ã�11H��15H��ű�����(sh��)��16H-19H��ų���(sh��)
- ;
- ;
- ; ���x
- VSDA EQU P1.5 ; EEPROM��(sh��)��(j��)���Ϳ�
- VSCL EQU P1.4 ; EEPROM�r犂��Ϳ�
- SLA EQU 50H ; EEPROM������ַ�ֹ�(ji��)��ņ�Ԫ
- NUMBYT EQU 51H ; EEPROM�����ֹ�(ji��)��(sh��)��ņ�Ԫ
- MTD EQU 30H ; EEPROM�l(f��)�͔�(sh��)��(j��)���_��Ԫ
- MRD EQU 40H ; EEPROM�x����(sh��)��(j��)��ņ�Ԫ
- SLAW EQU 0A0H ; EEPROM��ַ�ֹ�(ji��)��
- SLAR EQU 0A1H ; EEPROM��ַ�ֹ�(ji��)�x
- DPHH EQU 62H ; DPTRӋ(j��)��(sh��)�U(ku��)չ��8λ
- TH1H EQU 6CH ; ���r��T1�U(ku��)չ��8λ
- TH1HH EQU 6DH ; ���r��T1�U(ku��)չ��8-16λ
- ;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;; PRO GRAM INPUT ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ORG 0000H ;�����(zh��)���_ʼ��ַ
- LJMP START ;����START
- ORG 0003H ;����0��������
- LJMP INTEX0 ;����INTEX0�����(w��)����
- ORG 000BH ;���r��T0��������
- RETI ;���
- ORG 0013H ;����1�����
- LJMP INTEX1 ; ����INTEX1�����(w��)����
- ORG 001BH ; ���r��T1��������
- LJMP INTT1 ; ����INTT1�����(w��)����
- ORG 0023H ;�����Д���ڵ�ַ
- RETI ;���
- ORG 002BH ;���r��T2�Д���ڵ�ַ
- RETI ;���
- ;
- ;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;; PROGRAM CLEAR ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;��늳�ʼ������
- CLEARMEN: MOV TMOD, #90H ;T1��16λ�ⲿ���ƶ��r��
- MOV SP, #75H ;�ї���75H�_ʼ
- SETB PX0 ;���Д�0��(y��u)�ȼ���1
- SETB IT0 ;���Д�0��߅���|�l(f��)
- SETB IT1 ;���Д�1��߅���|�l(f��)
- MOV 20H, A ;���(n��i)�����ض���Ԫ
- MOV 6CH, A ;
- MOV 6DH, A ;
- MOV 70H, A ;
- MOV 71H, A ;
- MOV 72H, A ;
- MOV 73H, A ;
- MOV 60H, A ;
- MOV 61H, A ;
- MOV 62H, A ;
- MOV 63H, A ; ���(n��i)�����ض���Ԫ
- DEC A ;A��#0FFH
- MOV 68H, A ;��(n��i)����(sh��)��(j��)#0FFH
- MOV 69H, A ;��(n��i)����(sh��)��(j��)#0FFH
- MOV 6AH, A ;��(n��i)����(sh��)��(j��)#0FFH
- MOV 6BH, A ;��(n��i)����(sh��)��(j��)#0FFH
- MOV P1, A ;P1����1
- CLEAR1: JB P1.2, KEY1 ;����(j��)P1.2,P1.3,P1.6,P1.7�O(sh��)�à�B(t��i)
- ; ��21��ַ��Ԫ�x����܇���L
- ֵ
- MOV 21H, #0FH ; 22������܇���Lֵ
- LJMP CLEAR2 ; �D(zhu��n)CLEAR2
- KEY1: JB P1.3, KEY2 ;
- MOV 21H, #12H ; 24������܇���Lֵ
- LJMP CLEAR2 ; CLEAR2
- KEY2: JB P1.6, KEY3 ;
- MOV 21H, #14H ; 26������܇���Lֵ
- LJMP CLEAR2 ; �D(zhu��n)CLEAR2
- KEY3: JB P1.7, ERR ; �Ă��_�P(gu��n)���]���ϣ��D(zhu��n)���e̎��
- MOV 21H, #19H ; 28������܇���Lֵ
- CLEAR2: SETB TR1 ; �_���r��T1
- SETB EA ; �_�����S
- SETB EX0 ; �_����0
- SETB ET1 ; �_���r��T1
- SETB P3.1 ; �P(gu��n)��(b��o)����
- LCALL VIICREAD ; ��EEPROM��ԭ��̔�(sh��)��(j��)�{(di��o)��
- ��(n��i)��
- RET ; �ӳ���
- ERR: CPL P3.1 ; ݆���L�O(sh��)�ó��e��LED���W
- ����
- ALL DL5S ; �ӕr
- LJMP CLEAR1 ; ���³�ʼ�����ȴ�݆���L�O(sh��)���_�P(gu��n)����
- ;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;; PROGRAM START ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;
- START: LCALL CLEARMEN ; ��늳�ʼ��
- START1: JB P3.0, DISPLAYS ; P3.0=1���@ʾ���
- LCALL DISPLAYV ; �@ʾ�ٶ�
- START2: SJMP START1 ; �D(zhu��n)START1ѭ�h(hu��n)
- ;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;; INTEX0 PROGRAM ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ; ���Ӌ(j��)��(sh��)���������Д�0��(sh��)�F(xi��n)��Ӌ(j��)��(sh��)��60H-62H��(n��i)���Ԫ��
- INTEX0: PUSH ACC ; �ۼ����ї����o(h��)
- PUSH PSW ; ��B(t��i)�ֶї����o(h��)
- INC 60H ; Ȧ��1
- CLR A ; ��A
- CJNE A, 60H, INTEX0OUT ; Ӌ(j��)��(sh��)�]����D(zhu��n)INTEX0OUT
- INC 61H ; ����M(j��n)�61H��1��
- CJNE A, 61H, INTEX0OUT ; Ӌ(j��)��(sh��)�]����D(zhu��n)INTEX0OUT
- INC 62H ; ����M(j��n)�62H��1��
- INTEX0OUT: LCALL VIICWRITE ; ��̔�(sh��)��(j��)����EEPROM
- SETB EX1 ; �_����1
- POP PSW ; ��B(t��i)�ֻ֏�(f��)
- POP ACC ; �ۼ����֏�(f��)
- RETI ; ���
- ;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;; INTEX1 PROGRAM ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ; ÿ�D(zhu��n)1Ȧ�r�gӋ(j��)��(sh��)̎������ÿȦ�r�g����68H-6BH��Ԫ�С�
- INTEX1: PUSH ACC ; �ї����o(h��)
- PUSH PSW ;
- CLR EX1 ; �P(gu��n)����1
- JNB 00H, INTEX11 ; �����(bi��o)־��0�D(zhu��n)INTEX11
- MOV TL1, #0FFH ; ����rӋ(j��)�r��Ԫ�x#0FFH���@ʾ�ٶȞ��㣩
- MOV TH1, #0FFH ;
- MOV 6CH, #0FFH ;
- MOV 6DH, #0FFH ;
- INTEX11: MOV 68H, TL1 ; ���r�gӋ(j��)��(sh��)ֵ���땺���Ԫ68H-6BH
- MOV 69H, TH1 ;
- MOV 6AH, 6CH ;
- MOV 6BH, 6DH ;
- CLR A ; ��A
- MOV TL1, A ; Ӌ(j��)�r��Ԫ��0
- MOV TH1, A ;
- MOV 6CH, A ;
- MOV 6DH, A ;
- CLR 00H ; �������(bi��o)־
- POP PSW ; �ї��֏�(f��)
- POP ACC ;
- RETI ; ���
- ;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;; INTT1 PROGRAM ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;
- ; T1Ӌ(j��)��(sh��)���Д����(w��)����Ӌ(j��)��(sh��)��T1�����Д�1ݔ����ƣ���(d��ng)����ƽ�rӋ(j��)�r�_ʼ��
- INTT1: PUSH ACC ; �ї����o(h��)
- PUSH PSW ;
- INC 6CH ; 6CHӋ(j��)�r��Ԫ��1
- MOV A, 6CH ; ����A
- JNZ INTT11 ; ������0�D(zhu��n)INTT11
- INC 6DH ; �M(j��n)λ��6DH��Ԫ��1
- MOV A, 6DH ; ����A
- JNZ INTT11 ; ������0�D(zhu��n)INTT11
- SETB 00H ; Ӌ(j��)�r��������������(bi��o)־
- INTT11: POP PSW ; �֏�(f��)�ї�
- POP ACC ;
- RETI ; ���
- ;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;; DISPLAY S ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;
- ;����@ʾ���Ƴ���
- DISPLAYS: SETB P1.0 ; �c(di��n)��LED1���@ʾ��̠�B(t��i)��
- CLR P1.1 ; �P(gu��n)�]�ٶ�ָʾ��
- SETB P3.7 ; �@ʾС��(sh��)�c(di��n)����С�@ʾ��0.1���
- LCALL SSS ; ��Ȧ��(sh��)�D(zhu��n)�鹫�(sh��)
- LCALL DISPLAY ; �@ʾ���(sh��)��(j��)
- LJMP START1 ; ����START1
- ;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;; DISPLAY V ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;�ٶ��@ʾ���Ƴ���
- DISPLAYV: CLR P1.0 ; �P(gu��n)�]LED1����̣���
- SETB P1.1 ; �c(di��n)��LED2(�@ʾ�r�٠�B(t��i))
- CLR P3.7 ; �P(gu��n)С��(sh��)�c(di��n)�@ʾ
- LCALL VVV ; ÿȦ�r�g�Q��鹫��/С�r����
- MOV A, 71H ; ��ʮλ��(sh��)��BCD�a��ֵ����A
- SUBB A, #04H ; �c�A(y��)����(b��o)��ֵ���^
- JNC WARING ; �r�ٳ��^40�r��(b��o)��
- SETB P3.1 ; �P(gu��n)��(b��o)����
- V1: LCALL DISPLAY ; �@��һ�Σ����˸����W�q��
- RET ; �ӳ���
- WARING: CLR P3.1 ; ��(b��o)����LED3�c(di��n)���������
- AJMP V1 ; �D(zhu��n)V1�˳�
- ;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;; VIIC WRITE ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;�wһ��EEPROM�������12M�r犣������딵(sh��)��50H����Ԫ
- VIICWRITE: ACALL WMOV9
- MOV SLA, #SLAW
- MOV NUMBYT, #09H
- LCALL WRNBYT
- RET
- WMOV9: MOV 5FH, #50H
- MOV R0, #MTD
- MOV R1, #5FH
- MOV R2, #09H
- WMOV: MOV A, @R1
- MOV @R0, A
- INC R0
- INC R1
- DJNZ R2, WMOV
- RET
- ;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;; VIICRE AD ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ; �wһ��EEPROM�x������12M�r犣����x����(sh��)����60H-67H��Ԫ
- VIICREAD: MOV MTD, #50H
- MOV SLA, #SLAW
- MOV NUMBYT, #01H
- LCALL WRNBYT
- MOV SLA, #SLAR
- MOV NUMBYT, #08H
- LCALL RDNBYT
- ACALL RMOV8
- RET
- RMOV8: MOV R0, #MRD
- MOV R1, #60H
- MOV R2, #08H
- RMOV: MOV A, @R0
- MOV @R1, A
- INC R0
- INC R1
- DJNZ R2, RMOV
- RET
- ;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;; VIIC PROGRAM ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ; I2C���Кwһ���惦�ӳ���
- STA: SETB VSDA
- SETB VSCL
- NOP
- NOP
- NOP
- NOP
- CLR VSDA
- NOP
- CLR VSDA
- NOP
- NOP
- NOP
- NOP
- CLR VSCL
- RET
- STOP: CLR VSDA
- SETB VSCL
- NOP
- NOP
- NOP
- NOP
- SETB VSDA
- NOP
- NOP
- NOP
- NOP
- CLR VSDA
- CLR VSCL
- RET
- MACK: CLR VSDA
- SETB VSCL
- NOP
- NOP
- NOP
- NOP
- CLR VSCL
- SETB VSDA
- RET
- MNACK: SETB VSDA
- SETB VSCL
- NOP
- NOP
- NOP
- NOP
- CLR VSCL
- CLR VSDA
- RET
- CACK: SETB VSDA
- SETB VSCL
- CLR F0
- MOV C, VSDA
- JNC CEND
- SETB F0
- CEND: CLR VSCL
- RET
- WRBYT: MOV R0, #08H
- WLP: RLC A
- JC WR1
- AJMP WR0
- WLP1: DJNZ R0, WLP
- RET
- WR1: SETB VSDA
- SETB VSCL
- NOP
- NOP
- NOP
- NOP
- CLR VSCL
- CLR VSDA
- AJMP WLP1
- WR0: CLR VSDA
- SETB VSCL
- NOP
- NOP
- NOP
- NOP
- CLR VSCL
- AJMP WLP1
- RDBYT: MOV R0, #08H
- RLP: SETB VSDA
- SETB VSCL
- MOV C, VSDA
- MOV A, R2
- RLC A
- MOV R2, A
- CLR VSCL
- DJNZ R0, RLP
- RET
- WRNBYT: MOV R3, NUMBYT
- LCALL STA
- MOV A, SLA
- LCALL WRBYT
- LCALL CACK
- JB F0, WRNBYT
- MOV R1, #MTD
- WRDA: MOV A, @R1
- LCALL WRBYT
- LCALL CACK
- JB F0, WRNBYT
- INC R1
- DJNZ R3, WRDA
- LCALL STOP
- RET
- RDNBYT: MOV R3, NUMBYT
- LCALL STA
- MOV A, SLA
- LCALL WRBYT
- LCALL CACK
- JB F0, RDNBYT
- RDN: MOV R1, #MRD
- RDN1: LCALL RDBYT
- MOV @R1, A
- DJNZ R3, ACK
- LCALL MNACK
- LCALL STOP
- RET
- ACK: LCALL MACK
- INC R1
- SJMP RDN1
- ;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;; DISPLAY PROGRAM ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ; �@ʾ�����@ʾBCD�a��70H-73H��Ԫ��(n��i)�����ù��LED��(sh��)�a��
- DISPLAY: MOV R1, #70H ; �@ʾ��Ԫ��ַ
- MOV R2, #0FEH ; ������
- PLAY: MOV A, R2 ; ��������A
- MOV P2, A ; �ŵ��˿�
- MOV A, @R1 ; ȡ�@ʾ��(sh��)��(j��)
- ANL A, #0FH ; ȥ������λ����0��
- MOV DPTR, #TAB ; ȡ�δa����ַ
- MOVC A, @A+DPTR ; ���@ʾ��(sh��)��(j��)����(y��ng)�δa
- MOV P0,A ; �δaݔ��
- LCALL DL1MS ; �c(di��n)��1����
- INC R1 ; ָ����һ�@ʾ��(sh��)��(j��)��ַ
- MOV A, R2 ; ȡ������
- JNB ACC.3, ENDOUT ; �ђ��赽����λ���D(zhu��n)ENDOUT�˳�
- RL A ; ѭ�h(hu��n)����
- MOV R2, A ; �Ż�R2
- AJMP PLAY ; �D(zhu��n)PLAYѭ�h(hu��n)
- ENDOUT: SETB P2.0 ; �P(gu��n)����
- SETB P2.1 ; �P(gu��n)����
- SETB P2.2 ; �P(gu��n)����
- SETB P2.3 ; �P(gu��n)����
- RET ; ����Y(ji��)��
- ;��ꎶδa�������@ʾ0-F��
- TAB: DB 3FH, 06H, 5BH, 4FH, 66H, 6DH, 7DH, 07H
- DB 7FH, 6FH, 77H, 7CH, 39H, 5EH, 79H, 71H
- DB 00H
- ;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;; SSS PROGRAM ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ; ���̎����������܇Ȧ��(sh��)��(j��)�Q��ɹ��(sh��)
- SSS: MOV 19H, #64H ; ����(sh��)���λ�xֵ
- MOV 18H, #00H ; ����(sh��)�xֵ
- MOV 17H, #00H ; ����(sh��)�xֵ
- MOV 16H, #00H ; ����(sh��)�xֵ
- MOV 11H, #00H ; ������(sh��)�xֵ
- MOV 12H, #00H ; ������(sh��)�xֵ
- MOV 13H, 62H ; ������(sh��)�xֵ
- MOV 14H, 61H ; ������(sh��)�xֵ
- MOV 15H, 60H ; ������(sh��)�xֵ
- LCALL DIVST ; �{(di��o)��������
- LCALL BCDST ; �{(di��o)���M(j��n)���D(zhu��n)BCD�a����
- MOV A, 25H ; �Y(ji��)��̎������25H��(sh��)����A
- ANL A, #0FH ; ������λ�Þ�0
- MOV 70H, A ; ����70H��Ԫ
- MOV A, 25H ; 25H��(sh��)����A
- SWAP A ; �ߵ���λ���Q
- ANL A, #0FH ; ������λ�Þ�0
- MOV 71H, A ; ����71H��Ԫ
- MOV A, 24H ; 24H��(sh��)����A
- ANL A, #0FH ; ������λ�Þ�0
- MOV 72H, A ; ����72H��Ԫ
- MOV A, 24H ; 24H��(sh��)����A
- SWAP A ; �ߵ���λ���Q
- ANL A, #0FH ; ������λ�Þ�0
- MOV 73H, A ; ����73H��Ԫ
- RET ; �ӳ���
- ;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;; VVV PROGRAM ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ; �r��̎����������@ʾ�ٶȞ�99����/С�r����������܇��
- VVV: MOV 18H,68H ; ����(sh��)�xֵ
- MOV 17H,69H ; ����(sh��)�xֵ
- MOV 16H,6AH ; ����(sh��)�xֵ
- MOV 11H,#00H ; ������(sh��)�xֵ
- MOV 12H,#00H ; ������(sh��)�xֵ
- MOV 13H, #36H ; ������(sh��)�xֵ
- MOV 14H, #0EEH ; ������(sh��)�xֵ
- MOV 15H, #80H ; ������(sh��)�xֵ
- LCALL DIVST ; �{(di��o)��������
- MOV 14H, #00H ; ��ȥһλ
- LCALL BCDST ;���M(j��n)���D(zhu��n)BCD�a����
- MOV A, 25H ;�����ٶ�ֵ�����@ʾ��Ԫ
- ANL A, #0FH ;�����0
- MOV 70H, A ;����70H��(n��i)
- MOV A, 25H ;��ȡ��(sh��)
- SWAP A ;�ߵ��Ľ��Q
- ANL A, #0FH ;�����0
- MOV 71H, A ;����71H��(n��i)
- MOV 72H, #00H ;72H��0���߶�λLED�@ʾ0��
- MOV 73H, #00H ;73H��0
- RET ;�ӳ���
- ;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ; DL1MS ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;1�����ӕr����LED�c(di��n)����
- DL1MS: MOV R6, #14H
- DL1: MOV R7, #19H
- DL2: DJNZ R7, DL2
- DJNZ R6, DL1
- RET
- ;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ; DL0.5S ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;���e�W�q���ӕr��255���룩
- DL5S: MOV R5, #0FFH
- DL3: LCALL DL1MS
- DJNZ R5, DL3
- RET
-
-
- ;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ; �����ӳ��� ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;�����ӳ���������λ����������(sh��)��16H-19H��������(sh��)��11H-15H��
- DIVST: CLR C ;�\(y��n)���_ʼ
- MOV A, 13H
- SUBB A, 18H
- MOV A, 12H
- SUBB A, 17H
- MOV A, 11H
- SUBB A, 16H
- JNC LOOP4
- MOV B, #10H
- NDIV1: CLR C
- MOV A, 15H
- RLC A
- MOV 15H, A
- MOV A, 14H
- RLC A
- MOV 14H, A
- MOV A, 13H
- RLC A
- MOV 13H, A
- MOV A, 12H
- RLC A
- MOV 12H, A
- MOV A, 11H
- RLC A
- MOV 11H, A
- MOV F0, C
- CLR C
- MOV A, 13H
- SUBB A, 18H
- MOV 1AH, A
- MOV A, 12H
- SUBB A, 17H
- MOV 19H, A
- MOV A, 11H
- SUBB A, 16H
- JB F0, NDIV2
- JC NDIV3
- NDIV2: MOV 11H, A
- MOV A, 19H
- MOV 12H, A
- MOV A, 1AH
- MOV 13H, A
- INC 15H
- NDIV3: DJNZ B, NDIV1
- CLR F0
- DIVEND: RET
- LOOP4: SETB F0
- SJMP DIVEND
- ;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;; BCD�a�D(zhu��n)�Q���� ;;
- ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
- ;��14H��15H��Ԫ��(n��i)��(sh��)��(j��)�D(zhu��n)�Q��ʮ�M(j��n)��BCD�a����24H��25H��Ԫ��(n��i)��
- BCDST: MOV R7, #10H
- CLR C
- MOV 25H, #00H
- MOV 24H, #00H
- KKK: MOV A, 15H
- RLC A
- MOV 15H, A
- MOV A, 14H
- RLC A
- MOV 14H, A
- MOV A, 25H
- ADDC A, 25H
- DA A
- MOV 25H, A
- MOV A, 24H
- ADDC A, 24H
- DA A
- MOV 24H, A
- DJNZ R7, KKK
- RET
- END ;����Y(ji��)��</font></font>
������Word��ʽ�ęn51�����d��ַ��
 ����܇?y��n)���ٶ��?j��)���O(sh��)Ӌ(j��)���I(y��)Փ��.doc
(316.5 KB, ���d��(sh��): 22)
����܇?y��n)���ٶ��?j��)���O(sh��)Ӌ(j��)���I(y��)Փ��.doc
(316.5 KB, ���d��(sh��): 22)
2018-4-26 16:50 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
|





 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664





 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��