本科生畢業設計(論文)
第1章 緒 論1.1 微機繼電保護的歷史背景微機繼電保護指的是以數字式計算機為基礎而構成的繼電保護。它起源于20世紀60年代中后期,是在英國、澳大利亞和美國的一些學者的倡導下開始進行研究的。60年代中期,有人提出用小型計算機實現繼電保護的設想,但是由于當時計算機的價格昂貴,同時也無法滿足高速繼電保護的技術要求,因此沒有在保護方面取得實際應用,但由此開始了對計算機繼電保護理論計算方法和程序結構的大量研究,為后來的繼電保護發展奠定了理論基礎。計算機技術在70年代初期和中期出現了重大突破,大規模集成電路技術的飛速發展,使得微型處理器和微型計算機進入了實用階段。價格的大幅度下降,可靠性、運算速度的大幅度提高,促使計算機繼電保護的研究出現了高潮。在70年代后期,出現了比較完善的微機保護樣機,并投入到電力系統中試運行。80年代,微機保護在硬件結構和軟件技術方面日趨成熟,并已在一些國家推廣應用。90年代,電力系統繼電保護技術發展到了微機保護時代,它是繼電保護技術發展歷史過程中的第四代。
我國的微機保護研究起步于20世紀70年代末期、80年代初期,盡管起步晚,但是由于我國繼電保護工作者的努力,進展卻很快。經過10年左右的奮斗,到了80年代末,計算機繼電保護,特別是輸電線路微機保護已達到了大量實用的程度。我國對計算機繼電保護的研究過程中,高等院校和科研院所起著先導的作用。從70年代開始,華中理工大學、東南大學、華北電力學院、西安交通大力自動化研究院都相繼研制了不同原理、不同型式的微機保護裝置。1984年原華北電力學院研制的輸電線路微機保護裝置首先通過鑒定,并在系統中獲得應用,揭開了我國繼電保護發展史上的新一頁,為微機保護的推廣開辟了道路。在主設備保護方面,東南大學和華中理工大學研制的發電機失磁保護、發電機保護和發電機-變壓器組保護也相繼于1989年、1994年通過鑒定,投入運行。南京電力自動化研究院研制的微機線路保護裝置也于1991年通過鑒定。天津大學與南京電力自動化設備廠合作研制的微機相電壓補償式方向高頻保護,西安交通大學與許昌繼電器廠合作研制的正序故障分量方向高頻保護也相繼于1993年、1996年通過鑒定。至此,不同原理、不同機型的微機線路和主設備保護各具特色,為電力系統提供了一批新一代性能優良、功能齊全、工作可靠的繼電保護裝置。因此到了90年代,我國繼電保護進入了微機時代。隨著微機保護裝置的研究,在微機保護軟件、算法等方面也取得了很多理論成果,并且應用于實際之中。
1.2 微機繼電保護的現狀雖然我國在計算機繼電保護方面的研究工作起步較晚,但發展很快,并卓有成效。1984年華北電力學院研制得MDP—1微機距離保護裝置經試運行后通過了科研鑒定,標志著我國繼電保護從模擬式向數字式轉變的開始。現在,微機繼電保護在我國已占主要地位。
微機繼電保護裝置與過去大量使用的整流型或晶體管型繼電保護裝置相比,有其突出的優點。第一,微機繼電保護以微型計算機為基礎,用數字電路代替傳統的模擬電路,軟硬件技術的成熟與完善,使得微機保護具有巨大的計算、分析和邏輯判斷能力,有存儲記憶功能,可以實現性能完善且復雜的保護原理。第二,所有的計算、邏輯判斷均由軟件完成,而成熟的軟件一次性設計測試完成后,就不必在投產前再逐項試驗,使得微機保護維護調試方便;如果要對微機保護的工作原理、功能配置和運行結構進行改進,只需要對軟件進行修改,不必改動硬件電路。第三,微機保護可連續不斷地對自身的工作情況進行自檢,其工作可靠性很高。第四,微機保護裝置能保證在任何時刻都不斷地采樣計算,反復準確地校核,動作的準確率很高。第五,微機保護可以做到硬件和軟件資源共享,在不增加任何硬件的情況下,只需增加一些軟件就可以獲得如故障錄波、故障測距、事故順序記錄等輔助功能,這對于簡化保護的調試、事故分析和事故后的處理等都有重大意義。第六,完善的人機界面使得裝置使用靈活、方便,人機交流友好。第七,微機保護重集成了串行通信功能,與變電所微機監控系統的通信聯絡使微機保護具有遠方監控的特點,管理人員可以隨時監測保護裝置的運行狀態、調用數據和改變定值,為現代化管理提供物質條件,并將微機保護納入變電所綜合自動化系統。
隨著計算機技術、微電子技術、網絡通信技術、信息技術的不斷發展,最新研制的微機繼電保護的體積更小,功能更強,性能更優。如硬件結構方面,采用具有強大數據處理功能的DSP微處理芯片,低功耗可編程邏輯芯片和高集成度專用芯片后,使裝置的體積、功耗、可靠性等方面得到很大的提升。微機繼電保護正向微型化、網絡化、智能化和人性化方面高速發展。
應用微型計算機或微處理機構成的繼電保護。1965年已開始計算機保護的研究工作,但由于在價格、計算速度和可靠性方面的原因,發展緩慢。70年代初、中期,大規模集成電路技術的飛速發展,微型計算機和微處理機問世,價格大幅度下降,計算速度不斷加快,可靠性也大為提高,微機繼電保護的研制隨之出現高潮,到70年代后期已趨于實用。
1.3 微機繼電保護的發展方向
由于計算機的優越存儲能力,可以方便地得到保護需要的故障分量并準確地予以保持,這是模擬式保護裝置難以達到的。由于計算機的強大運算能力,可以實現一些以往模擬式保護裝置無法實現的復雜保護動作特性、自適應性的定值或特性改變以及良好的自檢功能。同常規繼電保護相比,微機繼電保護的抗電磁干擾能力較弱,因此,它的廣泛應用受到一定的限制。應用微機繼電保護時,應特別注意解決好電磁兼容性問題。
電力是當今世界使用最為廣泛,地位最為重要的能源,電力系統的安全穩定運行對國民經濟、人民生活乃至社會穩定都有著極為重大的影響。電力系統由各種電氣元件組成。這里電氣元件是一個常用術語,它泛指電力系統中的各種在電氣上可獨立看待的電氣設備、線路,器具等。電力系統繼電保護的基本作用是,在全系統范圍內,按指定分區實時地檢測各種故障和不正常運行狀態,快速及時地采取故障隔離或告警等措施,以求最大限度地維持系統的穩定、保持供電的連續性、保障人身的安全、防止或減輕設備的損壞。
線路的電流電壓保護構成簡單,可靠性好,用于中、低壓電網一般能滿足對保護性能的要求。但是,由于電流電壓保護的靈敏度受系統運行方式的影響,有時候保護范圍很小,甚至可能保護范圍為零,對長距離重負荷線路即使是定時限過電流保護也不一定能滿足靈敏度要求。另外,該保護的整定計算也比較麻煩等。這些使得其在35KV及以上的復雜網絡中很難適用,為此,研究出性能更好的保護原理和方案,這就是距離保護。距離保護能克服電流電壓保護受系統運行方式影響大的缺點。
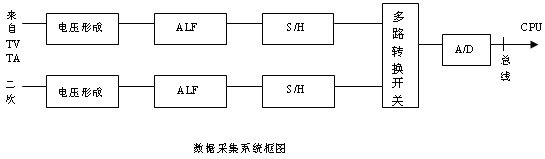
第2章 110KV線路微機距離保護系統設計2.1數據采集系統設計數據采集系統包括電壓形成回路、ALF、采樣保持電路S/H、模擬多路轉換開關MPX及模數轉換器A/D五部分。
同傳統保護一樣,微機保護的輸入信號來自被保護線路或設備的電流互感器,電壓互感器的二次側。這些互感器的二次電流或電壓一般數值較大,變化范圍也較大,不適應模數轉換器的工作要求,故需對它進行變換。一般采用各種中間變換器來實現這種變換。對于電流的變換一般采用電流變換器并在其二次側并電阻以取得所需電壓,改變電阻值可以改變輸出范圍的大小。此外,也可以采用電抗變換器,二者各有優缺點。電抗變換器的優點是由于鐵芯帶氣隙而不易飽和,線性范圍大,同時有移相作用;其缺點是會抑制直流分量,放大高頻分量。因此當一次流過非正弦電路時,其二次電壓波形將發生畸變。不過,其抑制非周期分量作用在某些應用場合也可能成為優點;而移相作用在微機保護中很容易地通過軟件來完成,因此在電壓形成回路中是否有移相作用意義不大。電流變換器最大的優點是只要鐵芯不飽和,其付方電流及并聯電阻上電壓的波形基本保持與原方電流波形相同且同相,即它的變換可使原信息不失真。但是,電流變換器在非周期分量的作用下容易飽和,線性度差,動態范圍小。
采樣保持電路由一個模擬開關、保持電容及兩個阻抗變換器組成。開關受采樣脈沖控制,在脈沖到來時模擬開關閉合,此時電路處于采樣狀態,保持電容上的電壓為在采樣時刻的電壓值。在模擬開關斷開時,電容上保持住原采樣電壓,電路處在保持狀態。若阻抗變換器1和阻抗變換器2的輸入阻抗為無限大,輸出阻抗為零,電容無泄露,采樣脈沖寬度為零,則其為一理想采樣保持器。但這種理想狀態是不可能實現的,因為在采樣狀態時,電容上的電壓不可能實現的,輸入電壓,而有一個過渡過程,在保持狀態,電容上的電壓也不可能毫不衰減地保持住模擬開關斷開前的電壓有衰減量。目前采用的采樣保持電路都是把幾部分集
成在一片芯片上,保持電容是外接的由用戶選擇。對微機保護系統來講,在故障出瞬,電壓,電流中可能含有很高的頻率成分,為了防止頻率混疊,采樣頻率必然選的很高,從而要求硬件速度快,使成本增高,有時甚至難以做到。實際上目前大多數保護原理都是基于工頻分量的,故可以在采樣之前使輸入信號限制在一定的頻帶之內,即降低輸入信號的最高頻率,從而就可以降低頻率,這樣一方面可以降低對硬件的速度要求,另一方面也不至于產生頻率混疊現象。微機保護裝置通常是幾路模擬量輸入通道公用一個A/D芯片,采用多路轉換開關將各通道保持的模擬信號時接通A/D變換器。多路轉換開關是電子型的,通道切換受微機控制。多路轉換開關包括選擇接通路數的二進制譯碼電路和它控制的各路電子開關,他們被集中在一片集成電路芯片上。
模數轉換器ADC的基本原理,每個AD轉換器都有一個滿刻度值,這個滿刻度值也叫基準電壓。AD轉換就是將輸入的離散的模擬量與基準電壓進行比較,按照四舍五入的原則,編成二進制代碼的數字信號。模數轉換一般要用到數模轉換器,數模轉換器的作用是將數字量轉換成模擬量。A/D轉換器用的是AD574,是由美國模擬器件公司生產,其主要作用有參考電壓、偏置電壓、模擬量輸入、模擬地和數字地、數字量輸出、控制線和狀態線。
2.1.1 數據傳輸方案在數據傳輸部分的設計中,調研了基于USB、火線之類的解決方案。采用這些協議開發設備可以使數據采集部分的設計比較簡單。目前,主板一般都支持USB1.1,不需要設計專門的數據采集卡。如果采用火線協議,TI的OHCI-lynx系列的芯片集成了一個PCI接口和火線的協議層。但是目前USB1.1標準還達不到所需要的帶寬,而USB2.0還沒有得到主板的普遍支持。采用火一雖然使得數據接收端的設計相對簡單。但是由于火線是一條多主的總線,每發送一幀數據都要打一個包頭,由于鏈路層協議的復雜,包頭的結構也相當的冗長,對于數據發送端鏈路層的大量寄存器配置,僅用CPLD實現,調試麻煩,不靈活。如果采用MCU來實現能夠對上百Mbps的數據流實時地打包的數據發送系統,復雜程序太高,嚴重影響項目進度。
依據開發難度、成本,最后選擇了兩種方案來構建傳輸系統:低壓差分和HOTlink。
低壓差分信號傳輸器件一般應用于背板信號互連之類的短距離通訊中,例如交換機系統。LVDS標準定義傳輸距離為10m,實際工程實踐中發現10Mbps的數據流在五類雙絞線上使用低壓差分至少可以在40m左右的傳輸距離穩定傳輸。目前國內的應用中一般在超過100m的情況下使用一個LVDS的中繼板。普遍使用的LVDS器件是國家半導體的90C031,90C032,1:1發送接收模塊,不帶復用與解復用的功能。如果需要兩根串行線傳輸方案,國家半導體也提供復用比可達到14:1與1:14的復用與解復用LVDS器件。LVDS器件使用比較方便,不需要內部編程與外部的邏輯控制,在PCB版圖設計時注意差分信號線基本等長、匹配電阻等瓿即可正常工作。
HOTLink第二代產品可以支持1500Mbps的傳輸速率,支持8位1、6位、32位數據接口,性能大大提高。當然基于HOTLink設計通訊產品難度相對要大一些,應用HOTLink傳輸系統需要比較復雜的外部狀態機的控制來保證接收端時鐘正確恢復.而且由于系統時鐘頻率較高,PCB版圖設計需要比較研究,要求設計者仔細考慮各種電磁干擾影響。
2.1.2 數據采集系統方案基于計算機的數據采集系統可以依據與計算機的接口同而分類。以目前工程應用來看,基于ISA總線的系統雖然帶寬足夠低速采集使用,但是由于主板生產商趨向于不再支持ISA,面監被USB接口產品取代的趨勢。而高速數據采集系統主要還是基于PCI總線傳輸數據。
一般來說,基于PCI總線的板卡可以分成信號處理板與數據采集板。對于二者的設計思想以及相應的PCI接口芯片的選擇也有所不同。數據采集系統一般為了采集數據流而設計。由于PCI總線是一個共享總線,仲裁算法一般是公平競爭,事實上132Mbytes/s的峰值速率僅僅是一個理想值。實際中要想穩定可靠地采集數據流,采集卡上必須有大小合適的緩存。數據采集系統從數據源到PC的整個體系是一個先進先出結構,核心問題是如何經濟有效地設計出盡可能大的先進先出的緩存系統。最簡單的實現方式是直接使用FIFO器件作為系統的緩存,當然這也是最昂貴的方案。也可以使用雙口RAM來實現FIFO結構。最廉價的方案是使用SRAM與雙路選擇器以及地址發生器實現大FIFO陣列。付出的代價使整個系統設計的復雜程序提高。
一般的PCI總線信號處理卡的總線部分設計重點在于如何將卡上的設備映射到系統的內存空間中云。常見的PCI接口芯片提供了PCI端總線與卡上局部端總線相互轉換的能力。而在數據采集卡的設計中,卡上的FIFO顯然只能作為一個端口訪問,設計得的任務是實現一個恰當的控制邏輯,使得FIFO可以被PCI接口芯片的DMA控制器訪問。在現有的PCI接口芯片里面,AMCC5933直接提供了FIFO接口,實現數據流采集的控制邏輯最為簡單。PLX等公司的PCI接口芯片則沒有提供特定的引腳來提供外部FIFO訪問能力,需要一個專門的接口邏輯來進行邏輯轉換。下面的例子是PLX9054與FIFO的接口邏輯連接圖,可以幫助理解這種系統的設計。
選擇AMCC5933的原因是因為它價格便宜,型號眾多,可以根據不同的需求選擇適當的型號,比較靈活,而且提供了SDK幫助工發Windows下的驅動程序。但是FIFO的接口邏輯部分添加了一定的工作量,不如AMCC5933來得簡便易用。設計者應該根據自己具體項目的要求來選擇。
高速率的數據采集系統在采集數據流時最常見的問題是數據丟失,采集后數據流不完整。為了在系統調試中檢驗這個問題,在系統設計時加入一個自校正碼源,使各系統自檢功能。
在系統中,為了驗證多大的緩存可保證數據流的連續采集,讓數據源發送端發送自增長的測試碼流。經過反復測試表明,在接收一個連續的數據流時,10Kbytes左右大小的FIFO緩存可以穩定不丟失地采集10Mbytes/s左右的數據流。但是為了整個計算機系統的穩定性考慮,建議在可能的情況下盡量用大的緩存。當然,對于數據的實時分析要求較高的領域,太大的緩存會引入延時的問題,這時候就要求權衡使用了。
2.2 CPU主系統設計初始化程序包括并行口初始化,采樣數據寄存地址指針初始化,定時器初始化,開中斷等環節。
(1)并行口初始化 在初始化時應規定PA0 -PA3為輸出,并賦初值0000,使多路開關接通0通道,以便響應定時器中斷時從0通道開始轉換數據。另外,還應規定PB0為輸入,以便CPU查詢STS狀態。
(2)采樣數據寄存地址指針初始化。由數據采集系統得到的各通道采樣值的轉換結果應存放在一個規定的RAM區,通常叫循環寄存區。因為數據是源源不斷輸入的,而寄存器有限,故只能不斷刷新舊數據而循環使用,但為了有一定的記憶能力,循環寄存區應有一定的存儲容量。為了使CPU能隨時知道下一數據該放在什么地址,在初始化時把循環寄存區的首地址存入指針。CPU在每次取得轉換結果后,總是把它存入指針所指向的地址,然后更新指針內容指向下一地址。指針內容的更新在一般情況下是加2,因為每一次12位轉換結果要占兩個字節,但要檢查一下更新結果是否超出循環區的末地址,如超出則應重新回到首地址以保證循環使用。
(3)定時器初始化,一般定時器都是可編程的。這里對定時器初始化就是根據設計要求規定采樣脈沖的周期等。
(4)開中斷。剛通電時,一般都由硬件屏蔽中斷。因此在完成數據采集系統初始化后,應由軟件解除中斷屏蔽。
CPU執行完初始化程序之后,一般接著執行主程序,但在定時器發出采樣脈沖請求中斷后,CPU應響應中斷,若數據預處理后未發現電力系統故障,則從中斷返回,繼續執行終端前的程序,同時準備再次響應中斷。中斷服務程序中的數據預處理部分,一般是保護的啟動元件的程序段。
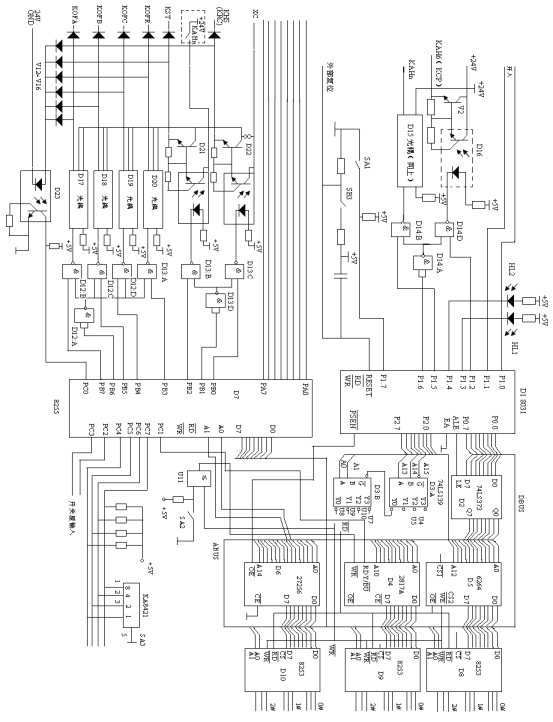
2.2.1 兩路開出回路
D14為兩端口與非門。輸出端KAH6在CPU1、CPU2、CPU3中用于驅動巡檢中斷告警電器KAH6。在預期時間內某個CPU收不到巡檢命令就驅動該繼電器;CPU4的KAH6端用于驅動加速繼電器KCP,以加速其他保護。正常情況下,8031的P1.2和P1.6均為低電平,要驅動巡檢中斷繼電器KAH6或加速繼電器KCP時,由軟件使P1.2置1,P1.6仍為低電平,光耦D16導通,驅動三極管V2,正24V電源通過V2加于告警插件的KAH6繼電器或邏輯插件的繼電器KCP上,前者發巡檢中斷信號,后者發后加速脈沖。
2.2.2 六路開出回路
由8255PB口驅動的6路開出回路中的5路分別用于驅動三個分相出口繼電器KOFA、KPFB、KSH、KOFC、永跳繼電器KOFC和啟動繼電器KST,另一
路對高頻保護用于控制收發信機停信或發允許信號;對綜合重合閘用于合閘出口,對距離保護和零序保護則用作備用。
三個分相出口繼電器中任兩個動作將驅動三跳繼電器KOFQ及三跳重動繼電器3KOS,KOFQ的出點外引,用于驅動操作繼電器箱中的TJQ,作為分相出口繼電器拒動后備跳閘回路。因此,當相間故障而分相出口拒動時,可通過TJQ不帶延時地實現三跳。
2.2.3 CPU的開入量本插件的開入量最多可達14個,分別由8255的PA口PC口的PC2、PC3及8031的P1.0、P1.1、P3.2、P3.3驅動。這些開關量均為經過8號及9號插件中的光耦輸入。
2.3 開關量輸入/輸出回路設計2.3.1 開關量輸入回路開關量輸入大多數是觸電狀態的輸入,可以分為兩類:
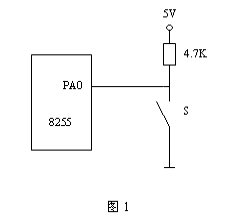
1)、安裝在裝置面板上的觸點,例如各種工作方式開關,調試裝置或運行中定期檢查裝置用的鍵盤觸點,復位按鈕及其他按鈕等。
這類觸點,與外界電路無聯系,可直接接至微機的并行接口,也可以直接與CPU口線連接。在初始化時規定圖中可編程并行口的PA0為輸入口,CPU可以通過軟件查詢,隨時知道外部觸點S的狀態。當S未被按下時,通過上拉電阻使PA0輸入電壓為5V,S按下時,PA0輸入電壓為0V。因此CPU通過查詢PA0的輸入電壓,就可以判斷S是處于斷開還是閉合狀態。
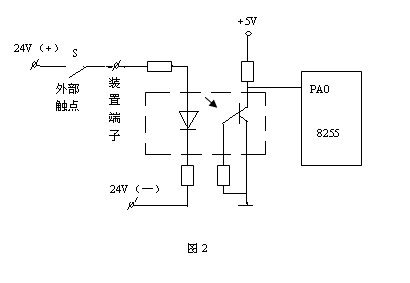
2)、從裝置外部經過端子排引入裝置的觸點,例如需要由運行人員不打開裝置外蓋而在運行中切換的各種壓板,轉換開關以及其他保護裝置和操作繼電器的觸點等。
這類觸點由于與外電路有聯系,不能象圖1那樣接入,而需經光耦器件進行隔離,以防觸點輸入回路引入的干擾,其原理接線如圖2所示。圖中虛線框內是光耦元件,集成在一個芯片內。當外部觸點S接通時,有電流通過光耦器件的發光二極管使光敏三極管受激發而導通,三極管集電極電位呈低電位。S打開時,光敏三極管截至,集電極輸出高電平。因此三極管集電極的電位即PA0口線的電位變化,就代表了外部觸點的通斷情況。這種電路使可能帶有電磁干擾的外部接線回路和微機電路之間,只有光的耦合而無電的聯系,因此可大大消弱干擾。
對于某些外部觸點,如果在其通斷變化后后須立即到處理,用軟件查詢方式會帶來延時,這時可以將光敏三極管的集電極直接接CPU的中斷請求端子。
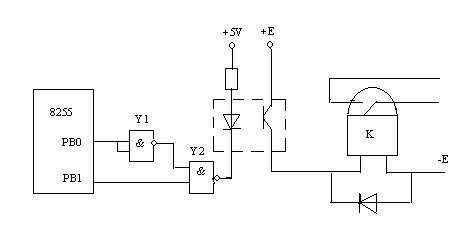
2.3.2 開關量輸出回路 開關量輸入主要包括保護的跳閘出口、合閘出口以及本地和中央信號等。一般都采用并行接口來控制有觸點繼電器的方法。為提高抗干擾能力,也要經過光電隔離,如圖所示。只要由軟件使并行口的PB0輸出“0”,PB1輸出“1”,便可使與非門Y2輸出低電平,發光二極管導通,光敏三極管激發導通,使繼電器K動作,其觸點閉合,啟動后級電路。在初始化和需要繼電器返回時,應使PB0輸出“1”,PB1輸出“0”。
這里經與非門Y1及與非門Y2輸出,而不是將發光二極管直接同并行口相連,一方面是為了增強并行口的帶負荷能力,另一方面是在采用了與非門后,要滿足兩個條件才能使K動作,從而增加了抗干擾能力。
PB0經一反相器,而PB1卻不經反相器,這樣可防止在拉和直流的過程中繼電器K的短時誤動。因為在拉和直流的過程中,當5V電源處在中間某一臨界電壓時,可能由于邏輯電路的工作紊亂而造成保護動作,特別是保護裝置的電源往往接有大量的電容器,所以拉和直流電源時,無論是5V電源還是驅動繼電器K用的電源E,都可能緩慢上升或下降,從而完全可能來得及使繼電器K的觸點短時閉合,由于兩個相反條件的互相制約,可以可靠的防止誤動作。
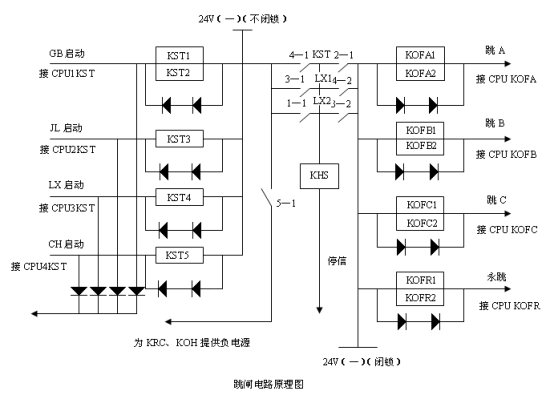
2.4 跳閘出口電路及邏輯等電路設計 啟動繼電器動作后啟動發信,同時兼作總開放繼電器,由其常開觸點對跳閘回路及停信繼電器24V電源的負極實現閉鎖。為防止CPU插件出現故障而誤動,啟動回路采用相互閉鎖方式,三個保護用的CPU分別驅動各自的啟動繼電器KST,KST的觸點接成三取二閉鎖方式,只有當CP1、CPU2、CPU3中至少有兩個同時啟動時,才能開放跳閘回路。綜合重合裝置的啟動元件KTS作為重合閘回路的總閉鎖。CPU4的KTS動作后,為重合閘繼電器KRC和重合閘信號繼電器KOH提供負電源,這樣當線路輕載偷跳單相時,雖各保護的KTS不動作,但亦能保證重合閘回路可靠工作。
2.4.1 跳閘出口電路當CPU1-CPU2中有一退出工作時,為了三取二閉鎖方式不影響未退出保護動作出口的可靠性,可以采用下面兩種措施:
- 通過連線LX1、LX2解除三取二閉鎖;
- 保護無故障停用時,可仍使該插件運行,其啟動元件仍然工作,只
是將該保護的出口壓板退出,這樣三取二閉鎖方式不會影響裝置的正常工作。
停信繼電器由CPU1的KST驅動。采用閉鎖方式時,用于控制停信;采用允許方式時,用于控制發信機發允許信號。
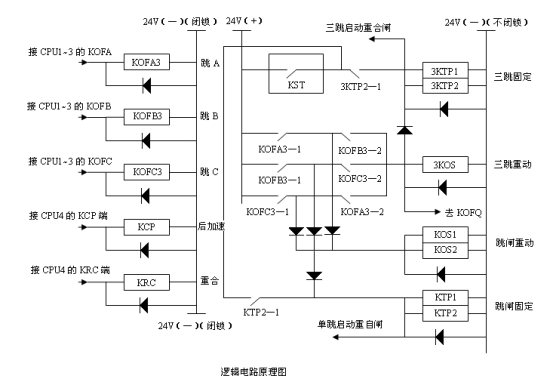
2.4.2 邏輯電路邏輯電路的原理圖如下圖,它主要由以下繼電器構成:
跳閘重動繼電器KOS。它在三個分相出口繼電器中任一個動作時動作。
三跳閘動繼電器3KOS。它在三個分相出口繼電器中任兩個同時動作時動作。
KOS及3KOS在分相出口繼電器返還時返還。
跳閘固定繼電器KTP。在三個分相出口繼電器中任一個動作時動作,并一直保持到KTS返還時解除自保持。
三跳固定繼電器3KTP。在三個分相出口繼電器中任兩個同時動作時動作,并保持到整組復歸。
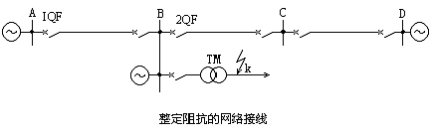
第3章 110KV線路微機距離保護相關計算3.1 三段相間距離保護參數計算及動作值整定
斷路器1QF處距離保護的整定計算
為配合方便,先求出1、3、4QF斷路器處保護第 段的整定值,即
段的整定值,即



斷路器1、3、4QF處距離保護第 段的動作時間和靈敏度分別為:
段的動作時間和靈敏度分別為:


斷路器1QF處距離保護第Ⅱ段的整定計算。
1QF處保護的相鄰元件為BC線和并聯運行的變壓器T。當1QF處距離保護第 段與BC線第段配合時,有
段與BC線第段配合時,有

而

故

和變壓器配合時,因為 ,應裝縱差保護,
,應裝縱差保護,
故變壓器第 段保護范圍應至低壓母線E上,
段保護范圍應至低壓母線E上,


式中, (考慮兩臺變壓器并列運行),
(考慮兩臺變壓器并列運行),  。
。
選 為整定值。距離保護第Ⅱ段的動作時間為:
為整定值。距離保護第Ⅱ段的動作時間為:

第 段保護的靈敏度為:
段保護的靈敏度為:
滿足靈敏度要求。
斷路器1QF處距離保護第Ⅲ段的整定計算。
因為采用方向阻抗元件,故距離保護第Ⅲ段的整定值應按以下條件整定。

 ,即
,即 而
而
故
按與相鄰距離保護第Ⅲ段動作時間配合,第Ⅲ段距離保護的動作時間為:

第二,與相鄰線距離保護第Ⅱ段配合,即
 ,
,




應取 為相間距離保護第Ⅲ段的整定值。
為相間距離保護第Ⅲ段的整定值。
按與相鄰距離保護第Ⅱ段配合,第Ⅲ段距離保護的動作時間為:
式中, ——相鄰線路重合后不經振蕩閉鎖的距離保護第Ⅱ段的動作時間。
——相鄰線路重合后不經振蕩閉鎖的距離保護第Ⅱ段的動作時間。
取第Ⅲ段的動作時間為: 
進行距離保護第Ⅲ段的靈敏度校驗:
當作為近后備時, 

可見,作為近后備保護時,可滿足靈敏度要求,作為BC線遠后備保護時,卻不滿足靈敏度要求,作為變壓器的遠后備保護時,更不滿足靈敏度要求,故應考慮取
 為整定值,這時靈敏度得到提高,為1.17,接近滿足要求。
為整定值,這時靈敏度得到提高,為1.17,接近滿足要求。
3.2 三段接地距離保護參數計算及動作值整定
動作阻抗
對輸電線路,按躲過本線路末端短路來整定,即取
動作時限

秒。
距離保護第二段
1.動作阻抗
(1)與下一線路的第一段保護范圍配合,并用分支系數考慮助增及外汲電流對測量阻抗的影響,即
式中為分支系數
與相鄰變壓器的快速保護相配合
取(1)、(2)計算結果中的小者作為
動作時限
保護第Ⅱ段的動作時限,應比下一線路保護第Ⅰ段的動作時限大一個時限階段,即
靈敏度校驗
如靈敏度不能滿足要求,可按照與下一線路保護第Ⅱ段相配合的原則選擇動作阻抗,即
這時,第Ⅱ段的動作時限應比下一線路第Ⅱ段的動作時限大一個時限階段,即
距離保護的第三段
動作阻抗
按躲開最小負荷阻抗來選擇,若第Ⅲ段采用全阻抗繼電器,其動作阻抗為
式中
動作時限
保護第Ⅲ段的動作時限較相鄰與之配合的元件保護的動作時限大一個時限階段,即
靈敏度校驗
作近后備保護時
作遠后備保護時
式中,Kfz為分支系數,取最大可能值。
方向阻抗繼電器的動作阻抗的整定原則與全阻抗繼電器相同。考慮到正常運行時,負荷阻抗的阻抗角

較小,而短路時,架空線路短路阻抗角

較大。如果選取方向阻抗繼電器的最大靈敏角

,則方向阻抗繼電器的動作阻抗為
阻抗繼電器的整定
保護二次側動作阻抗

式中
——接線系數
對距離保護的評價
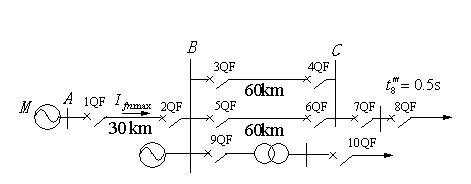
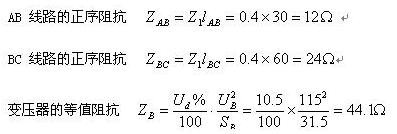
各線路均裝有距離保護,試對其中保護1的相間短路保護Ⅰ、Ⅱ、Ⅲ段進行整定計算。已知線路
AB的最大負荷電流

A,功率因數,
各線路每公里阻抗

/km,阻抗角

,電動機的自起動系數

,正常時母線最低工作電壓

取等于

kV

。
距離Ⅰ段的整定
動作阻抗:

動作時間:

s
距離Ⅱ段
動作阻抗:按下列兩個條件選擇。
與相鄰線路BC的保護3(或保護5)的Ⅰ段配合
于是
按躲開相鄰變壓器低壓側出口

點短路整定
此處分支系數

為在相鄰變壓器出口

點短路時對保護1的最小分支系數,
取以上兩個計算值中較小者為Ⅱ段定值,即取

動作時間
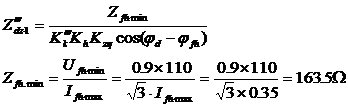
距離Ⅲ段
動作阻抗

取于是

動作時間 :

取其中較長者 s
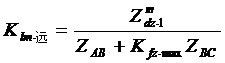
靈敏性校驗
1)本線路末端短路時的靈敏系數
相鄰元件末端短路時的靈敏系數
①相鄰線路末端短路時的靈敏系數為
式中,

為相鄰線路
BC末端

點短路時對保護1而言的最大分支系數,其計算等值電路如圖3-54所示。
相鄰變壓器低壓側出口

點短路時的靈敏系數中,最大分支系數為
第4章 110KV線路微機距離保護流程圖4.1 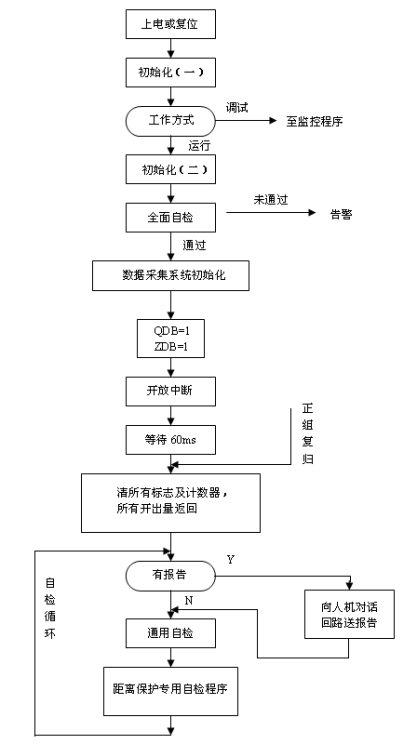 主程序流程圖
主程序流程圖
4.2 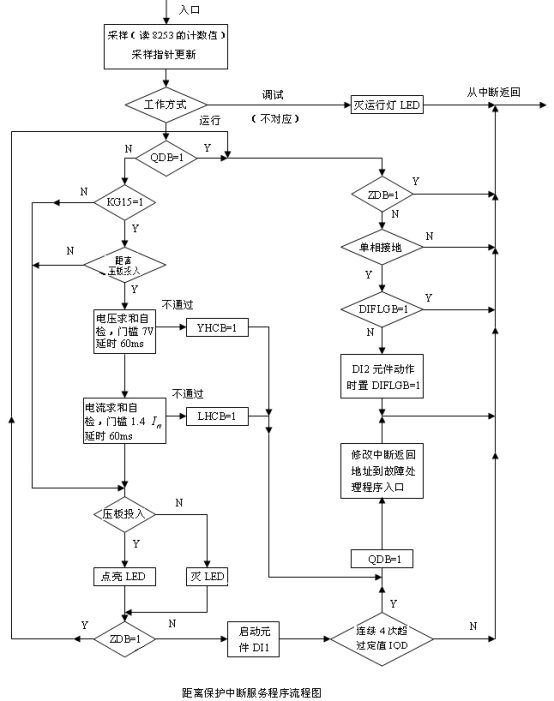 中斷服務程序流程圖
中斷服務程序流程圖
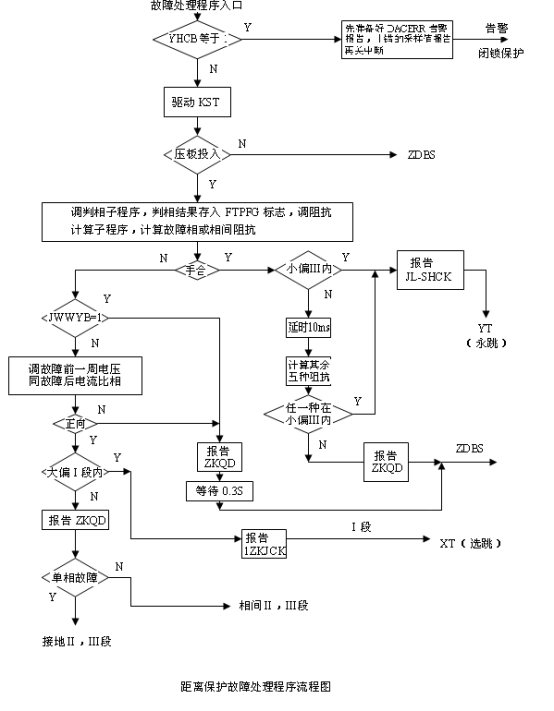
4.3 故障處理程序流程圖
第5章 總結
110KV線路微機距離保護設計這個畢業設計主要綜合運用微機技術實現輸電線路距離保護。微機距離保護是輸電線路微機繼電保護裝置的一個組成部分。距離保護是根據保護安裝處的測量阻抗的大小,判斷輸電線路是否發生故障,以及故障點是否在保護區內,從而決定保護是否動作及動作延時的大小。距離保護克服了電流電壓保護受系統運行方式影響大的缺點,具有較好的保護性能。按指定分區實時地檢測各種故障和不正常運行狀態,快速及時地采取故障隔離或告警等措施,以求最大限度地維持系統的穩定、保持供電的連續性、保障人身的安全、防止或減輕設備的損壞。可以實現常規保護很難辦到的自動糾錯,即自動地識別和排除干擾,防止由于干擾而造成誤動作,具有自診斷能力,能夠自動檢測出計算機本身硬件的異常部分,配合多重化可以有效地防止拒動,因此可靠性很高。
通過對數據采集系統、CPU主系統、開關量輸入/輸出回路、跳閘出口電路及邏輯等電路的設計使110KV線路微機距離保護建立一個完整的系統,這個系統對整個110KV輸電線路具有監測和保護的功能。對三段相間距離保護參數進行了計算及動作值整定和三段接地距離保護參數計算及動作值整定。編寫了距離保護的主程序、距離保護中斷服務程序設計、距離保護故障處理程序設計。畫出了各部分程序的流程圖。通過系統的設計、相關計算和程序的設計使整個系統有機的聯合起來,實現了對110KV輸電線路的保護。
參考文獻
1尹項根等,電力系統繼電保護原理與應用(上冊),武漢:華中科技大學出版社,2001.5
2谷水清,微機型線路保護原理及裝置,沈陽:遼寧大學出版社,1999.12
3張明君等,電力系統微機保護,北京:冶金工業出版社,2002.3
4羅士萍,微機保護實現原理及裝置,北京:中國電力出版社,2001.8
5許建安,電力系統微機繼電保護,北京:中國水利水電出版社,2001.8
6張志竟,黃玉錚編,電力系統繼電保護原理與運行分析(上冊),北京:中國電力出版社,1995
7王廣延,呂繼紹編,電力系統繼電保護原理與運行分析(下冊),北京:中國電力出版社,1995
8許振亞編,電力系統繼電保護,北京:中國電力出版社,1996
9賀家李,宋從矩編,電力系統繼電保護原理,第三版,北京:中國電力出版社,1994
10王維儉編,電力系統繼電保護基本原理,北京:清華大學出版社,1991
11楊奇遜主編,微機型繼電保護基礎,北京:水利電力出版社,1988
12陳德樹主編,計算機繼電保護原理與技術,北京:水利電力出版社,1992
13 Blackburn J L,et al. Applied Protective Relaying:2nd Edition . Coral Springs:Westinghouse Electric Corporation (Relay-Instrument Division),1982
14 Workgroup of GEC ALTHOM Measurements. Protective Relays-Application Guide:
3rd Edition . Stafford:GEC ALTHOM Protection & Control Limited,1987
15 Sachdev M S, et al. IEEE Tutorial Course – Microprocessor Relays and Protection Systems. New York:The Institute of Electrical and Electronices Engineering,Inc. ,1987
致 謝
110KV線路微機距離保護設計是在老師精心指導下完成的,在系統的設計過程中,老師除了每周二與周五指導我們外,還抽出了大量的業余時間為我們解答疑點。在此我衷心的表示感謝。
在進行畢業設計的過程中,老師要求我們要自主完成,發揮四年所學的知識,并通過閱讀和查找資料完善設計。在此也感謝電氣教研組其它老師和一些同學熱心的幫助。
附 錄1
The SEL-321 interaction is away from the protection static characteristic and the dynamic characteristic and the testing method
Schweitzer the engineering laboratory (SEL) microcomputer line protection has used the belt compensation negative sequence impedance directional element. In negative sequence impedance plane, when has the asymmetric failure, if actual surveys negative sequence impedance Z2=U2/I2 (in the formula U2, I2 respectively be inputs relay's breakdown voltage, electric current negative sequence component) the spot falls in z2=Z2Fb (in the formula z2 is survey negative sequence impedance in line negative sequence anti-angle direction projection, Z2Fb is forward movement threshold value which SEL relay basis different Z2 calculates) when the curve breast (z2≤Z2Fb) distinction for the direction breakdown, falls, in z2=Z2Rb (in the formula Z2Rb is backward action threshold value which SEL relay basis different Z2 calculates) when the curve upper side (z2≥Z2Rb) distinction for reversed direction breakdown. This kind of negative sequence directional element's installation value and movement characteristic and equipment movement actual system negative sequence impedance related, therefore when to uses this kind of negative sequence directional element's protection carries on the relay examination, the experiment, should pay attention to the testing method, if with the examination tradition relay's testing method, will possibly meet some questions.
1) Interaction is away from protection static state movement characteristic testing method the SEL-321 microcomputer line protection, has the interaction and the touchdown distance protection, the direction overflow protection and the fault location function, in view of not the balanced breakdown, its directional element has used the belt compensation negative sequence directional element. Its interaction from the protection direction impedance part and the negative sequence directional element is unifies in together, therefore, when carries on the test to this protection part characteristic, cannot use the test general direction impedance protection feature method, but must pay attention to experimental the electric current, the voltage peak-to-peak value and the phase, if is too far with the protective device in the reality system failure's time situation difference, possibly creates from the part started, but as a result of has the specific installation value negative sequence directional element starting not to cause the protection to be unable the movement situation.
The testing instrument uses OMICRON the CMC-156 relay protection reflectoscope reflector, CMC-156 provides in the impedance plane to is away from the protection test 2 essential methods: One kind is the constant current law, another kind is the constant source mesh method. to alternates with is away from the protection direction impedance circle part characteristic test, generally may use the constant current law. For example simulates the L2-L3 phase fault, carries on the impedance circle boundary search (to be equal to makes movement value examination in impedance circle boundary vicinity every other certain angle). Before this kind of test method artificial line breakdown, is the light condition, the failure test short-circuit current size certain (interphase current is tests electric current Itest:|IL2|=|IL3|=Itest), breakdown voltage (L2, L3 voltage between phases UL2-L3) the phase maintains for - 90° (take L1 the phase voltage UL1 phase as 0°), the L2, L3 interphase current's phase ∠IL2,∠IL3 Theta decided by the breakdown impedance Zf impedance angle, ∠IL2=-90°-θ,∠IL3=90°+θ; The breakdown voltage UL2-L3 size determined by the short-circuit impedance Zf size: |UL2-L3|=2.Itest|Zf|.
With constant current law fixed Itest=3.0 A, to the SEL-321 interaction the result which obtains from the protection direction impedance characteristic test is: When short-circuit impedance impedance angle in impedance circle most greatly keen angle (line impedance angle? L) neighbor when protects the movement to be normal, makes the movement impedance circle the boundary, ideal movement impedance circle is good with Figure 2 tallies; But works as the short-circuit impedance the impedance angle deviation most greatly keen angle region, protects the movement situation with the anticipated symbol, the impedance circle boundary is not unable to make. If the example the short-circuit impedance Zf=2.35∠40° OMEGA, the short dot should in the 3rd section of impedance circle, but the interaction protection does not act, even when Zf=0.2∠10° OMEGA protects does not act.
2) The impedance characteristic which the interaction uses the constant current from protection dynamic movement characteristic testing method the testing method not to be able to examine SEL-321LIANG when phase fault as shown in Figure 2. But CMC-156 has provided in the impedance plane another kind of basic test method - - constant source mesh method, may simulate some specific source impedance automatically (by trier hypothesis) in the situation when the different short-circuit impedance protects installs the electric current which and the voltage the quarter feels, the corresponding size and the phase obtained according to the source impedance and the breakdown impedance computation, had guaranteed the protection tested ZS and the systems operation situation match case, might in satisfy under like the negative sequence directional element's movement condition, carried on the test in view of the protection impedance movement characteristic, also in closer protection actual movement situation.
3)The different testing method with the protection static state movement characteristic and dynamic movement characteristic relations under the memory voltage's function, the direction impedance circle part to the breakdown response movement is the dynamic movement characteristic, only then maintains at the line fault the long time, after the remembering voltage stall, the direction impedance circle part to the breakdown response only then becomes the static movement characteristic. But has the initial period in the breakdown, the direction impedance circle part to the breakdown response is the dynamic movement characteristic. Then, why is away from the protection to the traditional protection's interaction the MHO direction impedance circle part characteristic, uses the constant current law to carry on the test to be possible to obtain the static characteristic? In fact, if SEL-321 does not have the negative sequence directional element's influence (negative sequence directional element definite value to be appropriate, negative sequence directional element may act when), may also use the constant current law to test to two phase faults time the static characteristic.
The constant current law obtains the static characteristic and protection itself acts what relations does the dynamic characteristic also have? As mentioned above, when constant current law simulation test, simulates certainly L2-L3 the phase fault, the failure test short-circuit current size certainly (|IL2|=|IL3|=Itest), the breakdown voltage (UL2-L3) phase maintains - 90° (take L1 the phase voltage UL1 phase as reference phase 0°), but before the breakdown, is the light condition, UL2-L3 phase for - 90°, i.e., after remembering voltage U|0| and breakdown, voltage U is with the phase, the static characteristic movement area 90°
Because when the memory voltage has an effect, the direction impedance circle part to the breakdown movement reflection is the dynamic characteristic, then obtains with the constant current law test in the static characteristic movement boundary any spot, is in the protection 1 dynamic characteristic movement boundary spot surely. For example uses the constant current law to fore-mentioned SEL-321|IL2|=|IL3|=Itest=3.0 A simulates the L2-L3 phase fault, tests the 3rd section of protection in the breakdown impedance angle for 40° the direction in movement boundary for Zf=2.42∠40°. From the test electric current, the voltage computation may result, this time ZS=14.317∠40°. In the impedance plane, and - the ZS segment circumscribes (as shown in Figure take Zzd3 as the diameter 5), because Zf is take zero point O and the Zzd3 segment as in the diameter circle spot, may know by the geometry theorem ∠OZfZzd3=90°, then has ∠ZSZfZzd3=90°, may also know Zf by the geometry theorem to be take - ZS and the Zzd3 segment as in the diameter circle spot. Therefore, the constant flow law makes the static characteristic movement boundary essence is changes the dynamic movement characteristic which the source impedance impedance makes in the corresponding source impedance angle direction boundary point set.
4)Conclusion
a) SEL the belt compensation's negative sequence directional element's installation parameter and the system impedance parameter have the close relation, therefore, when carries on the interaction is away from the protection test, the input current, the voltage size and the phase, should be in some system impedance (including source impedance, line impedance, breakdown impedance) in the situation produce, like this can guarantee that directional element's movement does not affect is away from the protection part. b) regarding has the memory polarizing voltage distance protection, uses OMICRON the CMC-156 relay protection reflectoscope reflector (or other has same function protection reflectoscope reflector), can only test with constant current's method test method is away from the protection the static movement characteristic, with the constant source mesh method's test method, may test is away from protects to not the balanced breakdown dynamic movement characteristic. c) not the balanced breakdown's constant current's method test obtains the distance protection static characteristic movement boundary, its essence is changes the source impedance obtained dynamic characteristic in the experimental source impedance impedance angle direction boundary point set.
SEL-321相間距離保護靜態特性與動態特性及試驗方法 Schweitzer工程試驗室(SEL)的微機線路保護采用了帶補償的負序阻抗方向元件。在負序阻抗平面上,當發生不對稱故障時,若實際測量負序阻抗Z2=U2/I2(式中U2,I2分別為輸入繼電器的故障電壓、電流的負序分量)的點落在z2=Z2Fb(式中z2為測量負序阻抗在線路負序抗角方向的投影,Z2Fb為SEL繼電器根據不同Z2計算出的正向動作閾值)曲線下側時(z2≤Z2Fb)判別為正方向故障,落在z2=Z2Rb(式中Z2Rb為SEL繼電器根據不同Z2計算出的反向動作閾值)曲線上側時判別為反方向故障。這種負序方向元件的整定值和動作特性與裝置運行的實際系統負序阻抗有關,因此在對采用這種負序方向元件的保護進行繼電器檢驗、試驗時,應注意試驗方法,如果用檢驗傳統繼電器的試驗方法,很可能會遇到一些問題。
1 相間距離保護靜態動作特性的試驗方法
SEL-321微機線路保護,具有相間及接地距離保護、方向過流保護和故障定位的功能,針對不平衡故障,它的方向元件采用了帶補償的負序方向元件。其相間距離保護的方向阻抗元件與負序方向元件是結合在一起的,因此,在對該保護元件特性進行測試時,不能用測試一般方向阻抗保護特性的方法,而必須注意試驗的電流、電壓的幅值和相位,若與保護裝置所在實際系統故障時的情況相差太遠,就可能造成距離元件已起動,但由于具有特定整定值的負序方向元件沒有起動而使保護無法動作的情況。
試驗儀器采用OMICRON的CMC-156繼電保護測試儀,CMC-156提供在阻抗平面上對距離保護測試的2種基本方法:一種是恒定電流法,另一種是恒定源阻抗法。
對相間距離保護方向阻抗圓元件特性的測試,一般可采用恒定電流法。例如模擬L2-L3相間短路故障,進行阻抗圓邊界搜索(相當于在阻抗圓邊界附近每隔一定角度做動作值檢驗)。這種測試方法模擬線路故障前為空載狀態,故障測試的短路電流大小一定(相電流均為測試電流Itest:|IL2|=|IL3|=Itest),故障電壓(L2,L3相間電壓UL2-L3)的相位保持為-90°(以L1相電壓UL1相位為0°),L2,L3相電流的相位∠IL2,∠IL3由故障阻抗Zf的阻抗角θ決定,∠IL2=-90°-θ,∠IL3=90°+θ;故障電壓UL2-L3的大小由短路阻抗Zf的大小確定:|UL2-L3|=2.Itest|Zf|。
用恒定電流法固定Itest=3.0 A,對SEL-321相間距離保護方向阻抗特性測試得到的結果是:當短路阻抗的阻抗角在阻抗圓最大靈敏角(線路阻抗角L)附近時保護動作正常,作出動作阻抗圓的邊界,與圖2的理想動作阻抗圓較好吻合;但當短路阻抗的阻抗角偏離最大靈敏角區域時,保護動作情況則與預期的不符,阻抗圓邊界根本無法作出。例如若短路阻抗Zf=2.35∠40° Ω,短路點應在第3段阻抗圓內,但相間保護不動作,甚至在Zf=0.2∠10° Ω時保護都不動作。
2 相間距離保護動態動作特性的試驗方法
采用恒定電流的試驗方法不能檢測SEL-321兩相相間短路時如圖2所示的阻抗特性。而CMC-156提供了在阻抗平面上的另一種基本測試方法——恒定源阻抗法,可以自動模擬某一特定源阻抗(由試驗者設定)情況下在不同短路阻抗時保護安裝處所感受到的電流和電壓,相應的大小和相位根據源阻抗和故障阻抗計算得到,保證了保護測試到的ZS與系統運行情況相符,這樣可在滿足負序方向元件的動作條件下,針對保護的阻抗動作特性進行測試,也更接近保護實際運行中的情況。
3 不同試驗方法同保護靜態動作特性和動態動作特性的關系
在記憶電壓的作用下,方向阻抗圓元件對故障的反應動作是動態動作特性,只有在線路故障保持長時間,記憶電壓失去作用后,方向阻抗圓元件對故障的反應才變為靜態動作特性。而在故障發生初期,方向阻抗圓元件對故障的反應是動態動作特性。那么,為什么對傳統保護的相間距離保護的MHO方向阻抗圓元件特性,采用恒定電流法進行測試可得到靜態特性呢?實際上,如果SEL-321沒有負序方向元件的影響(負序方向元件定值合適,負序方向元件可動作時),也可采用恒定電流法測試到兩相間短路時的靜態特性。
恒定電流法所測得的靜態特性和保護的本身動作的動態特性又有什么關系呢?如前所述,恒定電流法模擬測試時,模擬L2-L3相間短路,故障測試的短路電流大小一定(|IL2|=|IL3|=Itest),故障電壓(UL2-L3)的相位保持-90°(以L1相電壓UL1相位為參考相位0°),而故障前為空載狀態,UL2-L3相位為-90°,也就是說,記憶電壓U|0|與故障后電壓U是同相位的,靜態特性動作區90°<arg和動態特性動作區90°<arg(實際上是相同的。同樣可知,由于用恒定源阻抗法模擬三相平衡短路故障時,故障前后各相電壓的相位不會改變,因此用恒定源阻抗法的三相平衡故障測試方法測得的保護動作特性也是靜態動作特性圓。
由于在記憶電壓起作用時,方向阻抗圓元件對故障的動作反映是動態特性,那么用恒定電流法測試得到的靜態特性的動作邊界上任一點,必定是保護的1個動態特性的動作邊界上的點。例如對前述SEL-321用恒定電流法|IL2|=|IL3|=Itest=3.0 A模擬L2-L3相間短路,測試得第3段保護在故障阻抗角為40°方向上的動作邊界為Zf=2.42∠40°。從測試電流、電壓計算可得,此時ZS=14.317∠40°。在阻抗平面上,以Zzd3和-ZS連線為直徑作圓(如圖5所示),因為Zf是以原點O和Zzd3連線為直徑的圓上的點,由幾何定理可知∠OZfZzd3=90°,那么有∠ZSZfZzd3=90°,又由幾何定理可知Zf必是以-ZS和Zzd3連線為直徑的圓上的點。因此,恒流法所作出的靜態特性動作邊界實質是改變源阻抗阻抗所作出的動態動作特性在相應源阻抗角方向上的邊界點的集合。
4 結論
a)SEL帶補償的負序方向元件的整定參數與系統阻抗參數有密切關系,因此,在進行相間距離保護測試時,輸入電流、電壓的大小和相位,應是在某一系統阻抗(包括源阻抗,線路阻抗,故障阻抗)情況下產生的,這樣才能保證方向元件的動作不影響距離保護元件。
b)對于具有記憶極化電壓的距離保護,采用OMICRON的CMC-156繼電保護測試儀(或其它具有相同功能的保護測試儀),用恒定電流法的測試方法只能測試距離保護的靜態動作特性,用恒定源阻抗法的測試方法,可以測試得距離保護對不平衡故障的動態動作特性。
c)不平衡故障的恒定電流法的測試得到的距離保護靜態特性動作邊界,其實質是改變源阻抗所得的動態特性在試驗源阻抗阻抗角方向上的邊界點的集合。
本翻譯資料來自
Blackburn J L,et al. Applied Protective Relaying:2nd Edition . Coral Springs:Westinghouse Electric Corporation (Relay-Instrument Division),1982
單片機源程序如下: