|
課程名稱:MatLab與系統設計
實驗名稱:MatLab與ADAMS協同平臺實踐 實驗原理:對于線性時不變系統(LTI),MatLab提供了以下三個系統分析、設計和仿真平臺:LTI Viewer、SISO Design和SimuLink。ADAMS是多體動力學系統建模仿真分析平臺,其最有特色的是大位移非線性積分運算。將兩者構建成互補分析設計工具,形成了MatLab與ADAMS協同平臺。 實驗指導書:以下三個上機作業需要寫出書面報告!!! 本科生上機作業之一 題目:電機定位系統校正,滿足如下要求: (1)過渡時間小于40ms;(2)超調量小于16%; (3)靜態誤差為零;(4)擾動靜態誤差為零。 目的:熟悉LTI viewer和SISO Design平臺。 步驟: 1 創建M-file文擋,并輸入如下程序,運行后生成LTI對象my_sys: J=3.2284e-6; b=3.5077e-6; K=0.0274; R=4; L=2.75e-6; num=[0 0 0 K]; den=[(J*K) (J*R+(L*b)) ((b*R)+K^2) 0]; my_sys=tf(num,den); 2 啟動LTI viewer,并畫出開環BODE圖(拷貝); 3 啟動SISO Design,按照以下順序進行校正: 加積分環節;加零點(60角頻率);在截止頻率附近加滯后環節。 用鼠標移動零點/極點的相對位置,觀察相位裕度變化。 4 從analysis→respond to step調用LTI viewer分析閉環階越響應, 同時,用鼠標上下移動觀察階越響應的超調量變化,直到滿足校正要求,拷貝 5從analysis→closed loopbode調用LTI viewer分析閉環BODE圖(拷貝)。 本科生上機作業之二 題目:過程控制系統的PID校正(PP219) 目的:熟悉SIMULNK平臺,運用PID參數整定方法和非線性控制器參數優化(NCD模塊) 步驟: 1 創建MODEL文件,按照以下順序建立所需的模塊: 傳遞函數模塊(continuous/transfer FCN)根據裝置傳遞函數定義相應的系數 PID模塊(simulink extras/PID controller) SUM模塊(math operations/sum)定義PID參數(KP、KI、KD) 輸入模塊(sources/step) 輸出模塊(sinks/floating scope) 依次連線構成閉環反饋系統 2 設置初始值(KP=1、KI=0、KD=0),利用折中法找到這樣比例環節系數KP,使系統剛好處于臨界狀態,再利用書PP219表6-1的經驗公式計算整定參數; 3 觀察參數整定后閉環系統的階越響應; 4 用(NCD blockset/signal constraint)替換輸出模塊,并設置優化參數(KP、KI、KD),定義信號響應的邊界,進行優化并觀察結果; 5 對比參數整定與參數優化的階越響應(拷貝)。 本科生上機作業之三 題目:應用根軌跡法校正某二階系統,滿足如下指標要求: (1)過渡時間小于1.5s;超調量小于30%; (3)開環增益大于10。 目的:熟悉SISODesign,運用根軌跡校正。 步驟: 1創建M-file文擋,并輸入如下程序,運行后生成LTI對象my_sys: clear all num=1; den=[1 2 0]; my_sys=tf(num,den); 2啟動SISO Design,按照以下順序進行校正: 根據過渡時間和超調量,設置校正邊界; 添加實零點/極點,移動并觀察閉環極點變化,確定主導極點位置,觀察階越響應; 添加偶極子,提高開環增益,觀察階越響應。 3 結合本題,理解主導極點和偶極子概念。 考試方法:(上機綜合大作業) 本科生上機大作業(一) 題目:小球-杠桿控制問題 目的:熟悉ADAMS與MATLAB協同平臺,運用LQG控制技術 步驟: 1 啟動ADAMS,調入ball-beam模型,熟悉ADAMS界面、模型; 2 編寫腳本文件,輸出線性模型my_beam_ball_linmod_; 3 啟動MATLAB,編寫如下M-file(讀入線性模型,簡約均衡,可控可觀,設計LQG,構成閉環); 4 利用LTI Viewer分析SIGMA-曲線;利用SIMULINK進行擾動仿真分析; 5 編寫后處理文件,輸出控制器模型; 6 回到ADAMS環境,修改模型名稱,并依照順序定義:輸入變量組、輸出變量組,(A,B,C,D)矩陣。 7 定義線性狀態方程LSE,定義控制信號變量,修改杠桿力矩變量, 8 進行閉環控制系統仿真,協同仿真。 附錄: 線性系統分析設計程序: load my_beam_ball_linmod_a;load my_beam_ball_linmod_b; load my_beam_ball_linmod_c;load my_beam_ball_linmod_d; SS=ss(my_beam_ball_linmod_a,my_beam_ball_linmod_b, ... my_beam_ball_linmod_c,my_beam_ball_linmod_d); SS=ssbal(SS);SS=minreal(SS); A=SS.a;B=SS.b;C=SS.c;D=SS.d; V=eig(SS);disp('eigen value');disp(V); rank(ctrb(SS)) rank(obsv(SS)) K_lqry=lqry(SS,[1e+6 0;0 1e+4],[1]); PP=SS(:,[1,1]); Qn=1e+6; Rn=[0.01 0;0 0.01]; Kest = kalman(PP,Qn,Rn); rsys = lqgreg(Kest,K_lqry); CL_SS=feedback(SS,rsys,+1); 控制器模型后處理程序: A=rsys.a;B=rsys.b;C=rsys.c;D=rsys.d; [m n]=size(A);fid=fopen('AAA','w'); for i=1:m for j=1:n fprintf(fid,'%6.5e ,',A(i,j)); end end fclose(fid); [m n]=size(B);fid=fopen('BBB','w'); for i=1:m for j=1:n fprintf(fid,'%6.5e ,',B(i,j)); end end fclose(fid); [m n]=size(C);fid=fopen('CCC','w'); for i=1:m for j=1:n fprintf(fid,'%6.5e ,',C(i,j)); end end fclose(fid); [m n]=size(D);fid=fopen('DDD','w'); for i=1:m for j=1:n fprintf(fid,'%6.5e ,',D(i,j)); end end fclose(fid);
本科生上機大作業(二) 題目:集裝箱平車垂向彈性振動偏大問題 目的:熟悉ADAMS/RAIL平臺,運用剛柔耦合仿真技術 步驟: 1 啟動ADAMS/RAIL,調入K6X轉向架模板模型,熟悉ADAMS/RAIL的模板建模界面,并應用MNF文件建立柔性車體模型及接口定義; 2 熟悉ADAMS/RAIL的標準建模界面,建立轉向架、柔性車體子系統并組裝整車模型; 3 設置有關求解器參數,進行預載分析,定義心盤和旁承預載; 4 轉到ADAMS/VIEW界面,在搖枕上施加垂向激擾力(加載/減載,低頻諧振); 5 進行整車仿真得到搖振變摩擦懸掛加載/減載曲線和相位圖,并分析其變摩擦特性和低頻粘-滑振動; 6 將激擾力去掉,進行軌道不平順激擾仿真,并進行車體垂向加速度的時域/頻域分析,得到譜密度PSD。 7 以表格對比形式,給出車體垂向加速度時域統計特征(如MAX、MIN、RMS),和垂向平穩性指標Wzz。 8 根據上述分析數據,給出引起車體彈性振動偏大原因的結論。 附錄: 1 K6X交叉桿支撐轉向架 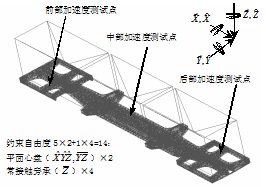 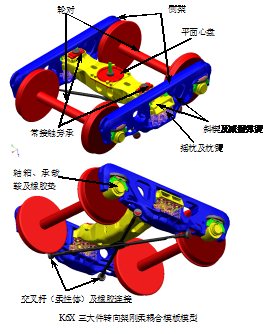 三箱重載柔性車體模型 三箱重載柔性車體模型2 車體柔性體是基于有限元FEM模型建立的[8],其中,約束自由度(14);固有模態:取前13階,包括:(1)垂向彎曲模態(7Hz,18Hz);(2)局部模態(2個,中間魚復板);(3)側扭模態(38Hz);…等等。由于集裝箱地腳鎖存在一定程度簡化,實際的垂向彎曲模態頻率要比計算值稍高一些。
完整的Word格式文檔51黑下載地址:
 作業題目.doc
(839 KB, 下載次數: 6)
作業題目.doc
(839 KB, 下載次數: 6)
2018-4-7 12:31 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
| 








 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

