С�^(q��)���������F���t�⣬�ضȣ�ú�⡣
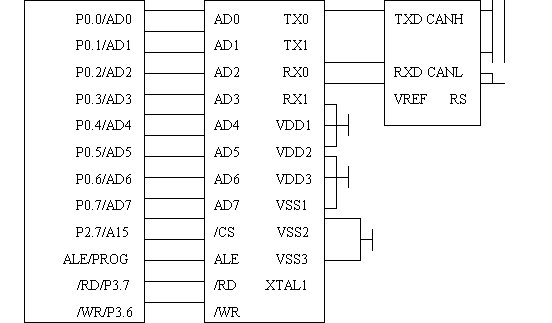
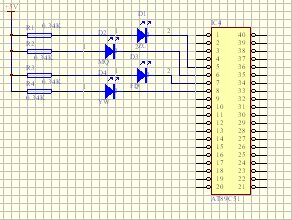
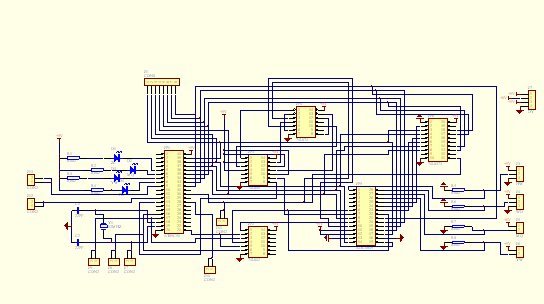
�����Ї�(gu��)���ӹ�����Ҫ�����l(f��)չ��ȫ����С�^(q��)���O(sh��)����(y��n)�������(hu��)�ΰ��΄�(sh��)����Ҫ���������ư�ȫ����С�^(q��)���I��(b��o)���W(w��ng)�j(lu��)ϵ�y(t��ng)�wϵ����ν�Q�ڮ�(d��ng)ǰÿ��(g��)��ͥ��(j��ng)��(j��)��������������r�£����O(sh��)�M��������ܼ��ɿ�������İ�ȫ����С�^(q��)�������I��(b��o)���W(w��ng)�j(lu��)ϵ�y(t��ng)���Ǯ�(d��ng)ǰ�����Q���n�}�����������ڿ��]�������صĻ��A(ch��)�ϣ����O(sh��)Ӌ(j��)�Ŀ��Ќ�(sh��)ʩ������ С�^(q��)��ȫ������(b��o)��ϵ�y(t��ng)������С�^(q��)��(sh��)�F(xi��n)��ȫ��������Ҫϵ�y(t��ng),��Ҫ�������I��(b��o)����ú��й©��(b��o)����������(b��o)���ȡ�С�^(q��)����O����Ҫ�ă�(n��i)���Ǵ_��סլ,ס����ȫ,������,���˶����ܳ��F(xi��n)һЩ���벻����������r,�F(xi��n)����ס�ĸ��,���ﳣ�겻��(l��i)�����dz���,��ͥ���(w��n)���ԡ����],��Խ��(l��i)Խ��(qi��ng)�����,С�^(q��)��ȫ��������(b��o)��ϵ�y(t��ng)�Ǿ������M(j��n)���O(sh��)Ӌ(j��)���O(sh��)��,����С�^(q��)ס���İ�ȫ�ṩ���ϵı�Ҫϵ�y(t��ng)�� �҇�(gu��)�İ����Ԅ�(d��ng)��(b��o)������ϵ�y(t��ng)��(j��ng)�v�ˏğo(w��)���С��ĺ�(ji��n)�ε���(f��)�s�İl(f��)չ�^(gu��)�̣������ܻ��̶�ҲԽ��(l��i)Խ�ߡ���С�^(q��)��(n��i)��ÿ��(g��)ס���Ԫ���bһ�_(t��i)��(b��o)�����C(j��)��ס�����x���b��ס���T�ڡ�����̎���b�z���o�����������F/ú��̽�^����˹̽�^���Ȉ�(b��o)����֪�O(sh��)�䣬��(b��o)�����C(j��)ͨ�^(gu��)�����c�������ĵ���X���B�ӣ��M(j��n)�а�����Ϣ����������l(f��)���I�\�J�롢���١����F��ȼ��й¶�����^(gu��)�ߵȾo���¹ʣ��������͕�(hu��)�����@֪���Ɉ�(b��o)��ϵ�y(t��ng)�����|�l(f��)�⾯��(b��o)����Ч������D�и`�ıI�\��ϵ�y(t��ng)߀��(hu��)Ѹ�����(b��o)�����Ă��͈�(b��o)����Ϣ����(b��o)�����Ľӵ�����������Ԅ�(d��ng)�M(j��n)�зֱ�̎����Ѹ���R(sh��)�e�ж�����(b��o)��͡����c(di��n)���Ñ������ē�(j��)���ɳ��C(j��)��(d��ng)������ȡ����(y��ng)��ȴ�ʩ��ϵ�y(t��ng)�߂�24С�r(sh��)���ƉĵȲ����ұO(ji��n)ҕ��һ�����κα��Ɖĵ��E��Ҳ��(hu��)���̈�(b��o)������֮���o(w��)Փ�����ҹ�����x������߀���ڼ���Ϣ����ӱ����r(sh��)�r(sh��)�̱̿��o(h��)�İ�ȫ���@�����ܞ���ˡ���ͥ��ؔ(c��i)�a(ch��n)����������Ч�İ�ȫ���I���o(h��)��ʩ�� 1 ���w�O(sh��)Ӌ(j��)1.1 �O(sh��)Ӌ(j��)�����ڮ�(d��ng)����ٰl(f��)չ�����(hu��)�У��˂���(du��)������̎�ĭh(hu��n)��Խ��(l��i)Խ�P(gu��n)�ģ��ӼҰ�ȫ�ѳɞ鮔(d��ng)��С��֮�҃�(y��u)�ȿ��]�Ć�(w��n)�}����(d��ng)�ϰ���Пo(w��)�ˣ����߃H�����˺����ڼң��������ڼ���˯������횴_����ͥ�ɆT��ؔ(c��i)�a(ch��n)�Ľ^��(du��)��ȫ�� �Ї�(gu��)���ӹ�����Ҫ�����l(f��)չ��ȫ����С�^(q��)���O(sh��)����(y��n)�������(hu��)�ΰ��΄�(sh��)����Ҫ���������ư�ȫ����С�^(q��)���I��(b��o)���W(w��ng)�j(lu��)ϵ�y(t��ng)�wϵ����ν�Q�ڮ�(d��ng)ǰÿ��(g��)��ͥ��(j��ng)��(j��)��������������r�£����O(sh��)�M��������ܼ��ɿ�������İ�ȫ����С�^(q��)�������I��(b��o)���W(w��ng)�j(lu��)ϵ�y(t��ng)���Ǯ�(d��ng)ǰ�����Q���n�}�����������ڿ��]�������صĻ��A(ch��)�ϣ����O(sh��)Ӌ(j��)�Ŀ��Ќ�(sh��)ʩ������һ��סլС�^(q��)���I��(b��o)��ϵ�y(t��ng)Ҫ�� ��(d��ng)ǰ���S����(j��ng)��(j��)�İl(f��)չ�����������������ƣ��˂���(du��)��ͥ����ؔ(c��i)�a(ch��n)��ȫԽ��(l��i)Խ��ҕ����ȡ���S���ʩ��(l��i)���o(h��)��ͥ�İ�ȫ�������������ǰ��b���I�T�����I�W(w��ng)����Ҳ�����еK���^�������Ϸ���Ҫ������Ч�ط�ֹ���˵����֡��F(xi��n)�ڣ�ȫ��(gu��)���ض��������ݱ���_չ���O(sh��)��ȫ����С�^(q��)�Ļ��(d��ng)�����Һܶ�ط������ȡ�����I�W(w��ng)�Ŀ�̖(h��o)����ͥ��ӷ��I��(b��o)��ϵ�y(t��ng)Ҳ�͑�(y��ng)�\(y��n)��������?y��n)����?sh��)��ͥ�����p�����������ͨ���]���ˣ��l(f��)����(b��o)�����Ҫ�Ќ��ˁ�(l��i)̎������ˣ�����O(sh��)����(b��o)�����ġ�������?y��n)�?gu��)��(n��i)סլ�^(q��)�����(sh��)���ܼ��ͷֲ���һ��(g��)סլ�^(q��)�����Ўװ���ǧ�������Ҷ��������ı����(du��)�飬��ˮ�(d��ng)�Ñ����I��(b��o)��ϵ�y(t��ng)��(b��o)���r(sh��)�������ڬF(xi��n)��(ch��ng)��(b��o)���⣬߀��Ҫ��(d��ng)?sh��)��ɳ������־��M(j��n)�Ј�(b��o)��(li��n)�W(w��ng)�⣬Ҳ��Ҫ��סլС�^(q��)�ı��������M(j��n)��(li��n)�W(w��ng)��(b��o)�����Ա㾯��õ�Ѹ��̎�������⣬���]����(gu��)��(n��i)�ձ�����ˮƽ�^�ͣ���(du��)��ÿһ����ͥ�ķ��I��(b��o)��ϵ�y(t��ng)�ɱ�����̫�ߣ�����?y��n)��Ñ��?sh��)���࣬Ҳ���ܲ����|(zh��)����Įa(ch��n)Ʒ�������`��(b��o)�l����ɲ���Ӱ푡�����(j��)���Ϸ�����סլС�^(q��)��(du��)���I��(b��o)��ϵ�y(t��ng)��Ҫ�����£�1.�V���ԡ�����Ҫ��С�^(q��)��(n��i)ÿ��(g��)��ͥ���ܵõ����o(h��)��2.��(sh��)���ԡ�����Ҫ��ÿ��(g��)��ͥ�ķ���ϵ�y(t��ng)���ڌ�(sh��)�H���ܰl(f��)�����ֺ�����r�¼��r(sh��)��(b��o)������Ҫ�������(ji��n)�㣬�h(hu��n)��(ji��)�٣��W(xu��)��3.ϵ�y(t��ng)�ԡ�����Ҫ��ÿ��(g��)��ͥ�ķ���ϵ�y(t��ng)�ڰ���l(f��)���r(sh��)�����������(b��o)���⣬��횼��r(sh��)�������l(w��i)���T����ͬ�r(sh��)�ψ�(b��o)��(d��ng)?sh��)ع����?b��o)�����ġ�4.�ɿ��ԡ�����Ҫ��ϵ�y(t��ng)���O(sh��)Ӌ(j��)�ĽY(ji��)��(g��u)�����a(ch��n)Ʒ��(j��ng)�����á�ϵ�y(t��ng)�ǿɿ���5.Ͷ�Y������------��Ҫ��ϵ�y(t��ng)Ͷ�Y����r(ji��)�ܿ�����С�^(q��)��ͥ�ܳ��ܵķ���֮��(n��i)�� 1.2 �O(sh��)Ӌ(j��)˼����С�^(q��)��(n��i)��ÿ��(g��)ס���Ԫ���bһ�_(t��i)��(b��o)�����C(j��)��ס�����x���b��ס���T�ڡ�����̎���b�z���o�����������F/ú��̽�^����˹̽�^�������z�y(c��)�������I��(b��o)�����Ȉ�(b��o)����֪�O(sh��)�䣬��(b��o)�����C(j��)ͨ�^(gu��)�����c�������ĵ���X���B�ӣ��M(j��n)�а�����Ϣ��������ϵ�y(t��ng)�����h(yu��n)�̈�(b��o)�����ܡ�����l(f��)���I�\�J�롢���١����F��ȼ��й¶�����^(gu��)�ߵȾo���¹ʣ��������͕�(hu��)�����@֪���Ɉ�(b��o)��ϵ�y(t��ng)�����|�l(f��)�⾯��(b��o)����Ч������D�и`�ıI�\��ϵ�y(t��ng)߀��(hu��)Ѹ�����(b��o)�����Ă��͈�(b��o)����Ϣ����(b��o)�����Ľӵ�����������Ԅ�(d��ng)�M(j��n)�зֱ�̎����Ѹ���R(sh��)�e�ж�����(b��o)��͡����c(di��n)���Ñ������ē�(j��)���ɳ��C(j��)��(d��ng)������ȡ����(y��ng)��ȴ�ʩ��ϵ�y(t��ng)�߂�24С�r(sh��)���ƉĵȲ����ұO(ji��n)ҕ��һ�����κα��Ɖĵ��E��Ҳ��(hu��)���̈�(b��o)������֮���o(w��)Փ�����ҹ�����x������߀���ڼ���Ϣ����ӱ����r(sh��)�r(sh��)�̱̿��o(h��)�İ�ȫ���@�����ܞ���ˡ���ͥ��ؔ(c��i)�a(ch��n)����������Ч�İ�ȫ���I���o(h��)��ʩ�� 1.3 ϵ�y(t��ng)�����O(sh��)Ӌ(j��)���з��I���Ҽ��з��𣬷�ú�⣬���I���ȹ��ܵ�С�^(q��)���I��(b��o)��ϵ�y(t��ng)���o(w��)�ɿ���ʹ��ͥ�����Ԅ�(d��ng)����ϵ�y(t��ng)�����w�eС�ɣ�����(qi��ng)�r(ji��)����˵Ć�Ƭ��Ӌ(j��)��C(j��)��������ͥ��һ�O(ji��n)ҕ�ˣ��c��Ƭ�C(j��)�B�Ӹ��N���ڼ�ͥ�����Ă����������ռ���̖(h��o)���ͽo��Ƭ�C(j��)����̎������Ƭ�C(j��)��(sh��)�r(sh��)�c�h(yu��n)�����O(ji��n)��Ӌ(j��)��C(j��)ͨ�ţ����Ă��������܁�(l��i)����̖(h��o)��(sh��)�r(sh��)���o���C(j��)�����C(j��)�˾Ϳ���֪��С�^(q��)����(g��)�����ͥ�Į�����r���Ķ��M(j��n)�Ќ�(sh��)�r(sh��)̎����ϵ�y(t��ng)����CAN������ݔ��Ϣ������˿ɿ��ԣ����������㣬�ڹ��̌�(sh��)�H���ЏV���đ�(y��ng)�ã�����������õđ�(y��ng)��ǰ�������ƏV�r(ji��)ֵ�� ԓϵ�y(t��ng)�\(y��n)�����ˆ�Ƭ�C(j��)AT89C51�� CAN��������Ҫ���Ժ��ܣ�������ʽ�C(j��)ͨ���\(y��n)���ڽ��������w�F(xi��n)���Ԅ�(d��ng)���İl(f��)չǰ��һƬ��������(du��)�ڑ�(y��ng)�Å^(q��)�� ÿ��(g��)��ͥ�Ɍ�(sh��)�F(xi��n)�����Пo(w��)�˕r(sh��)�����ϰ��ˣ��ɰѼ�ͥ��(b��o)��ϵ�y(t��ng)�O(sh��)�������������B(t��i)��ʹ���е�̽�y(c��)������������(l��i)����(d��ng)�`�\ԇ�D���T�������(y��ng)�_(t��i)�J�룬����(d��ng)�t��̽�y(c��)��̽�y(c��)����(d��ng)������̖(h��o)�l(f��)�����ұ����������̽��յ����飬�����ڔ�(sh��)����ֈ�(b��o)������Ҳ��(hu��)�յ���(b��o)����̖(h��o)���������˕r(sh��)����˯�X�r(sh��)����ϵ�y(t��ng)�O(sh��)�������ز�����B(t��i)����(d��ng)�`�\��D�Ĵ��T�J��r(sh��)�����̄�(d��ng)���l(f��)������(b��o)����������оo����r���缱�����ܵ����֕r(sh��)���ɰ���(d��ng)�I�P�ϵľo�����o�l(f��)������(b��o)�� 1.4 ϵ�y(t��ng)�O(sh��)Ӌ(j��)��D�D1.1 ϵ�y(t��ng)�M�ɽY(ji��)��(g��u)�D 1.5 ϵ�y(t��ng)��(sh��)�F(xi��n)���� (1) ���ø��N������������Ҫ�������Į�����̖(h��o)����̖(h��o)�ęz�y(c��)�c�D(zhu��n)�Q��ݔ�� (2) ��Ƭ�C(j��)���Ղ������z�y(c��)��̖(h��o)���M(j��n)�г���̎������ӛ䛰l(f��)����r��λ�ã��ηN��(b��o)���ȵȣ�Ҳ���Ԇ�Ƭ�C(j��)�M(j��n)�ЬF(xi��n)��(ch��ng)��(b��o)���� (3) ����CAN������(sh��)�F(xi��n)��Ƭ�C(j��)�c����Ӌ(j��)��C(j��)�Ĵ���ͨӍ�� (4) ������Ӌ(j��)��C(j��)�Ͻ��Ն�Ƭ�C(j��)�́�(l��i)�Ĉ�(b��o)����̖(h��o)���l(f��)����(b��o)����Ϣ�� 2 ϵ�y(t��ng)�����Է���2.1 Ӳ��ģ�K��(b��o)����Ӳ���ɜضȟ��F��̖(h��o)�ɼ�ģ�K��ú����̖(h��o)�ɼ�ģ�K�����I��(b��o)��ģ�K�����(b��o)��ģ�K���I�P�@ʾģ�K�Լ���Ƭ�C(j��)�cCAN����ģ�K�M�ɡ� 2.1.1��Ƭ�C(j��)����ģ�K��(j��ng)�^(gu��)���^�����ߛQ��ʹ�ó��á����r(ji��)�Ć�Ƭ�C(j��)AT89C51����������������Ƭ�C(j��)AT89C51����ATMEL��˾���a(ch��n)��51��Ƭ�C(j��)����(ji��n)�ν�B���£� AT89C51��һ��(g��)��늉���������CMOS 8λ��Ƭ�C(j��)��Ƭ��(n��i)��4k bytes�Ŀɷ���(f��)������ֻ�x����惦(ch��)����PEROM����128 bytes���S�C(j��)��ȡ��(sh��)��(j��)�惦(ch��)����RAM������������ATMEL��˾�ĸ��ܶȡ�����ʧ�Դ惦(ch��)���g(sh��)���a(ch��n)�����ݘ�(bi��o)��(zh��n)MCS-51ָ��ϵ�y(t��ng)��Ƭ��(n��i)��ͨ��8λ����̎������Flash�惦(ch��)��Ԫ����(n��i)�ù���(qi��ng)�����Ӌ(j��)��C(j��)��AT89C51�ṩ�˸��ԃr(ji��)�ȵĽ�Q������
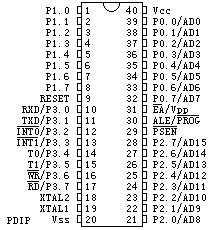
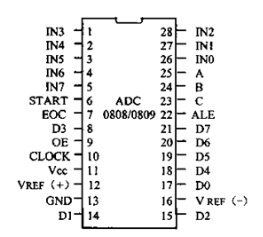
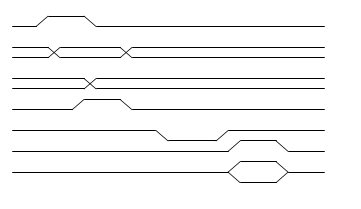
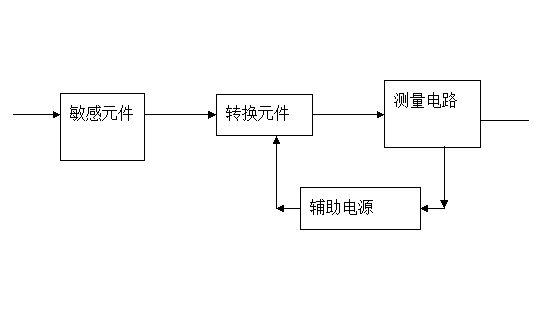
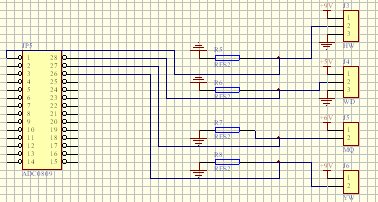
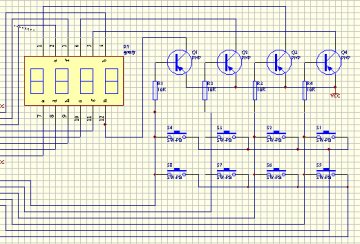
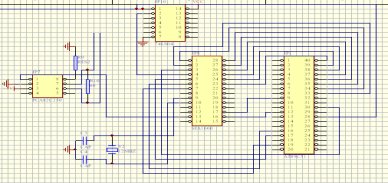
AT89C51��һ��(g��)���ĸ����܆�Ƭ�C(j��)��40��(g��)���_��32��(g��)�ⲿ�p��ݔ��/ݔ����I/O���˿ڣ�ͬ�r(sh��)��(n��i)��2��(g��)���Д�ڣ�2��(g��)16λ�ɾ��̶��r(sh��)Ӌ(j��)��(sh��)��,2��(g��)ȫ�p������ͨ�ſڣ� AT89C51�����ճ�Ҏ(gu��)�����M(j��n)�о��̣�Ҳ�����ھ����̡��䌢ͨ�õ�̎������Flash�惦(ch��)���Y(ji��)����һ���e�ǿɷ���(f��)������Flash�惦(ch��)������Ч�ؽ����_�l(f��)�ɱ��� AT89C51����PDIP��PQFP/TQFP��PLCC�����N���b��ʽ�����m��(y��ng)��ͬ�a(ch��n)Ʒ������ AT89C51�����_�D���D��ʾ�� �D2.1AT89C51оƬ�����_�D VCC�����늉��� GND���ӵء� P0�ڣ�P0�ڞ�һ��(g��)8λ©��(j��)�_·�p��I/O�ڣ�ÿ�_������8TTL�T�������(d��ng)P1�ڵĹ��_��һ�Ό�1�r(sh��)�������x�����ݔ�롣P0�܉������ⲿ����(sh��)��(j��)�惦(ch��)���������Ա����x�锵(sh��)��(j��)/��ַ�ĵڰ�λ����FIASH���̕r(sh��)��P0 ������ԭ�aݔ��ڣ���(d��ng)FIASH�M(j��n)��У�(y��n)�r(sh��)��P0ݔ��ԭ�a���˕r(sh��)P0�ⲿ��횱����ߡ� P1�ڣ�P1����һ��(g��)��(n��i)���ṩ��������8λ�p��I/O�ڣ�P1�ھ��_���ܽ���ݔ��4TTL�T�����P1�ڹ��_����1����(n��i)��������ߣ�������ݔ�룬P1�ڱ��ⲿ��������ƽ�r(sh��)����ݔ��������@�����ڃ�(n��i)�������ľ��ʡ���FLASH���̺�У�(y��n)�r(sh��)��P1������ڰ�λ��ַ���ա� P2�ڣ�P2�ڞ�һ��(g��)��(n��i)����������8λ�p��I/O�ڣ�P2�ھ��_���ɽ��գ�ݔ��4��(g��)TTL�T�������(d��ng)P2�ڱ�����1���r(sh��)������_����(n��i)������������ߣ�������ݔ�롣���������ݔ��r(sh��)��P2�ڵĹ��_���ⲿ���ͣ���ݔ��������@�����ڃ�(n��i)�������ľ��ʡ�P2�ڮ�(d��ng)�����ⲿ����惦(ch��)����16λ��ַ�ⲿ��(sh��)��(j��)�惦(ch��)���M(j��n)�д�ȡ�r(sh��)��P2��ݔ����ַ�ĸ߰�λ���ڽo����ַ��1���r(sh��)�������Ã�(n��i)��������(y��u)��(sh��)����(d��ng)��(du��)�ⲿ��λ��ַ��(sh��)��(j��)�惦(ch��)���M(j��n)���x���r(sh��)��P2��ݔ��������ܼĴ����ă�(n��i)�ݡ�P2����FLASH���̺�У�(y��n)�r(sh��)���ո߰�λ��ַ��̖(h��o)�Ϳ�����̖(h��o)�� P3�ڣ�P3�ڹ��_��8��(g��)����(n��i)�����������p��I/O�ڣ��ɽ���ݔ��4��(g��)TTL�T�������(d��ng)P3�ڌ��롰1������������(n��i)����������ƽ��������ݔ�롣����ݔ�룬�����ⲿ��������ƽ��P3�ڌ�ݔ�������ILL���@�����������ľ��ʡ� P3��Ҳ������AT89C51��һЩ����ܿڣ�������ʾ�� P3.0 RXD������ݔ��ڣ� P3.1 TXD������ݔ���ڣ� P3.2 /INT0���ⲿ�Д�0�� P3.3 /INT1���ⲿ�Д�1�� P3.4 T0��ӛ�r(sh��)��0�ⲿݔ�룩 P3.5 T1��ӛ�r(sh��)��1�ⲿݔ�룩 P3.6 /WR���ⲿ��(sh��)��(j��)�惦(ch��)�����xͨ�� P3.7 /RD���ⲿ��(sh��)��(j��)�惦(ch��)���x�xͨ�� P3��ͬ�r(sh��)���W�q���̺;���У�(y��n)����һЩ������̖(h��o)�� RST����(f��)λݔ�롣��(d��ng)��ʎ����(f��)λ�����r(sh��)��Ҫ����RST�_�ɂ�(g��)�C(j��)�����ڵĸ��ƽ�r(sh��)�g�� ALE/PROG����(d��ng)�L��(w��n)�ⲿ�惦(ch��)���r(sh��)����ַ�i�����S��ݔ���ƽ�����i���ַ�ĵ�λ�ֹ�(ji��)����FLASH�������g�������_����ݔ�뾎���}�_����ƽ�r(sh��)��ALE���Բ�׃���l������ݔ�����}�_��̖(h��o)�����l�ʞ���ʎ���l�ʵ�1/6���������������(du��)�ⲿݔ�����}�_�����ڶ��r(sh��)Ŀ�ġ�Ȼ��Ҫע����ǣ�ÿ��(d��ng)�����ⲿ��(sh��)��(j��)�惦(ch��)���r(sh��)�������^(gu��)һ��(g��)ALE�}�_�������ֹALE��ݔ������SFR8EH��ַ����0���˕r(sh��)�� ALEֻ���ڈ�(zh��)��MOVX��MOVCָ����ALE�������á����⣬ԓ���_�������ߡ����̎�������ⲿ��(zh��)�Р�B(t��i)ALE��ֹ����λ�o(w��)Ч�� /PSEN���ⲿ����惦(ch��)�����xͨ��̖(h��o)�������ⲿ����惦(ch��)��ȡָ���g��ÿ��(g��)�C(j��)�����ڃɴ�/PSEN��Ч�������L��(w��n)�ⲿ��(sh��)��(j��)�惦(ch��)���r(sh��)���@�ɴ���Ч��/PSEN��̖(h��o)�������F(xi��n)�� /EA/VPP����(d��ng)/EA���ֵ��ƽ�r(sh��)���t�ڴ����g�ⲿ����惦(ch��)����0000H-FFFFH���������Ƿ��Ѓ�(n��i)������惦(ch��)����ע����ܷ�ʽ1�r(sh��)��/EA����(n��i)���i����RESET����(d��ng)/EA�˱��ָ��ƽ�r(sh��)�����g��(n��i)������惦(ch��)������FLASH�������g�������_Ҳ����ʩ��12V�����Դ��VPP���� XTAL1��������ʎ�Ŵ�����ݔ�뼰��(n��i)���r(sh��)犹����·��ݔ�롣 XTAL2����(l��i)�Է�����ʎ����ݔ���� �ˆ�Ƭ�C(j��)��Ҫ���ڿ��ƣ�����푑�(y��ng)�Дࡢ�ӕr(sh��)���Дࡢ�l(f��)�͌�(du��)��̖(h��o)�a�ȵȡ� 2.1.2�ضȟ��F��̖(h��o)�ɼ�ģ�KҪ��(zh��n)�_���M(j��n)�л��(z��i)��(b��o)�����x����m�ĜضȂ������͟��F�������ǜ�(zh��n)�_��(b��o)����ǰ�ᡣ�C�Ͽ��]���N���أ������x�ɔ�(sh��)�֜ضȂ�����DS18B20�͟��F������NIS-09C�����ɼ�ϵ�y(t��ng)������Ԫ���� 2.1.3ú����̖(h��o)�ɼ�ģ�Kú��й¶��(b��o)��:һ��(d��ng)�҃�(n��i)ú�ⳬ�^(gu��)������(bi��o)��(zh��n)�r(sh��),����ͨ�^(gu��)���������ͥ�������l(f��)����(b��o)����̖(h��o)����(du��)���ܶȴ��ڿ՚�Ě��w���Б�(y��ng)�����ښ��wԴ���·�����(du��)���ܶ�С�ڿ՚�Ě��w���Б�(y��ng)�����ښ��wԴ���Ϸ�����(d��ng)ú��й¶��(b��o)������(d��ng),��֪ͨ�������ġ��C�Ͽ��]���N���أ������x�Ú��������TP-1.1A������ú���(b��o)���� 2.1.4���I��(b��o)��ģ�K���I��(b��o)��:��С�^(q��)ÿһס���(n��i)���b���I��(b��o)���b�á���(d��ng)ס�����Пo(w��)�˕r(sh��),�ɰѼ�ͥ��(n��i)�ķ��I��(b��o)��ϵ�y(t��ng)�O(sh��)�Þ鲼����B(t��i),��(d��ng)�`�\�J��r(sh��),��(b��o)��ϵ�y(t��ng)�Ԅ�(d��ng)�l(f��)������(b��o)����С�^(q��)�������Ĉ�(b��o)�����C�Ͽ��]���N���أ��x�ß��ጼt�������RE200B��(l��i)�M(j��n)�з��I��(b��o)���� 2.1.5���(b��o)��ģ�K ��AT89C51��P1�ڵ�P1��4��P1��7�քe����4��(g��)�l(f��)����O�ܣ����Թ��(b��o)����P1��4��P1��7���Ƶğ����Ξ�������̖(h��o)����ú����̖(h��o)�������(z��i)��̖(h��o)���ͷ��I��̖(h��o)������(d��ng)�@Щݔ����ݔ�����ƽ�r(sh��)����(du��)��(y��ng)����̖(h��o)�����(hu��)�l(f��)���(b��o)���� �D2.2 ���(b��o)���·�D 2.1.6��(sh��)��(j��)�ɼ�ģ�KA/D�D(zhu��n)�Q�DZ�ϵ�y(t��ng)���^�P(gu��n)�I��һ����ͨ�^(gu��)A/D�D(zhu��n)�Q���ɹ��İ���Ҫ�y(c��)���Ϳ��ƵĔ�(sh��)��(j��)�ɼ��^(gu��)��(l��i)���DZ��Cϵ�y(t��ng)���ܿ��Ԍ�(sh��)�F(xi��n)�ĵ�һ���������O(sh��)Ӌ(j��)��A/D�D(zhu��n)�Qģ�K��ʹ���_(d��)���A(y��)���A/D�D(zhu��n)�QЧ��������x�����m��A/D�D(zhu��n)�Q���� A/D�D(zhu��n)�Q�·�����˳��õ�8λ8ͨ����(sh��)ģ�D(zhu��n)�Q����оƬADC0809��ADC0809��8·ģ�M�_�^����ַ�i���c�g�a����8λA/D�D(zhu��n)�Q�������B(t��i)ݔ���i�澏�_���M�ɡ� (1) ����Ҫ����ָ��(bi��o)��: �ٷֱ��ʞ�8λ�� ������{(di��o)�`�0808�� 1��2LSB��0809��1LSB�� 1��2LSB��0809��1LSB�� �ۆ��Դ+5v��늣�����(zh��n)늉����ⲿ�ṩ������ֵ��+5v���˕r(sh��)���Sݔ��ģ�M늉���0��5V�� �ܾ����i����Ƶ�8·ģ�M�xͨ�_�P(gu��n)�� �ݿ��i�����B(t��i)ݔ����ݔ���ƽ�cTTL�ƽ���ݡ� ����15mW�� ���D(zhu��n)�Q�ٶ�ȡ�Q��оƬ�ĕr(sh��)��l�ʡ��r(sh��)��l�ʷ���500KHz�r(sh��)���D(zhu��n)�Q�r(sh��)�g��128��s�� (2)ADC0809���_���� �D2.3��ADC0809���_�D,�f(shu��)�����£� �D2.3 ADC0809оƬ���_ ��IN0��IN7����8·ģ�M��̖(h��o)ݔ��ˡ� ��ADDA��ADDB��ADDC����3λ��ַ�aݔ��ˡ�8·ģ�M��̖(h��o)�D(zhu��n)�Q�x����A��B��C�Q����A���λ��C���λ���c��8λ��ַ��A0��A2�B�ӡ���A0��A2��ַ000��111�x��INO��IN7��·A��Dͨ��������ģ�M�_�P(gu��n)�cݔ��ͨ�����P(gu��n)ϵҊ��3.1�� ��CLK�����ⲿ�r(sh��)�ݔ��ˡ��r(sh��)��l�ʸߣ�A��D�D(zhu��n)�Q�ٶȿ졣���S������10��1280KHz������ֵ��640KHz���˕r(sh��)A��D�D(zhu��n)�Q�r(sh��)�g��100��sͨ����MCS��51�͆�Ƭ�C(j��)ALE��ֱ�ӻ���l���c0809CLK�����B�ӡ���(d��ng)MCS��51�͆�Ƭ�C(j��)�o(w��)�x����RAM�����r(sh��)��ALE��̖(h��o)�̶���CPU�r(sh��)��l�ʵ�1��6���������6MHz���t1��6��1MHz�r(sh��)��A��D�D(zhu��n)�Q�r(sh��)�g��64��s�� ��2.1·ģ�M�_�P(gu��n)�cݔ��ͨ�����P(gu��n)ϵ�� ��D0��D7������(sh��)����ݔ���ˡ� ��  ����A��D�D(zhu��n)�Q�Y(ji��)��ݔ�����S���ƶˡ���(d��ng)��˞���ƽ�r(sh��)�����S��A��D�D(zhu��n)�Q�Y(ji��)����Do��D7��ݔ����ͨ����MCS�� 51�͆�Ƭ�C(j��)�����c0809Ƭ�x��(����P2.0)ͨ�^(gu��)����T�c0809�����B�ӡ���(d��ng)DPTR��FEFFH���҈�(zh��)��MOVX A����DPTRָ�� ����A��D�D(zhu��n)�Q�Y(ji��)��ݔ�����S���ƶˡ���(d��ng)��˞���ƽ�r(sh��)�����S��A��D�D(zhu��n)�Q�Y(ji��)����Do��D7��ݔ����ͨ����MCS�� 51�͆�Ƭ�C(j��)�����c0809Ƭ�x��(����P2.0)ͨ�^(gu��)����T�c0809�����B�ӡ���(d��ng)DPTR��FEFFH���҈�(zh��)��MOVX A����DPTRָ�� ��RD��P2.0����Ч����Ǻ�a(ch��n)�����ƽ��ʹ0809����Ч��0809��A��D�D(zhu��n)�Q�Y(ji��)�����딵(sh��)��(j��)����Po�ڣ�CPU���x��A�С� ��ALE������ַ�i�����S��̖(h��o)��8·ģ�Mͨ����ַ��A��B��Cݔ�룬��0809��ALE��̖(h��o)��Ч�r(sh��)��ԓ8·��ַ�i��(ע��0809ALE�c803lALE�ą^(q��)�e)�� ��START��������(d��ng)A��D�D(zhu��n)�Q��̖(h��o)����(d��ng)START��ݔ��һ��(g��)���}�_�r(sh��)����������(d��ng)0809�M(j��n)��A��D�D(zhu��n)�Q��START���cALE���B��һ����MCS��51�͆�Ƭ�C(j��)WR�c0809Ƭ�x��(����P2.0)ͨ�^(gu��)����T���B����(d��ng)DPTR��EFF8H����(zh��)�С�MOVX@DPTR��A��ָ�������(d��ng)0809ģ�Mͨ��0��A��D�D(zhu��n)�Q��FEF8H��FEFFH�քe��8·ģ�Mݔ��ͨ���ĵ�ַ����(zh��)��MOVX��ָ�������Č�A�Ѓ�(n��i)���M(j��n)0809�����Ǯa(ch��n)��WR��̖(h��o)��P2.o��Ч���Ķ�ʹ0809��START��ALE��Ч����ݔ��A��Dͨ��0��ַA0��A2����(sh��)��Ҳ�o(w��)����A��(n��i)���M(j��n)0809��0809�Л]��һ��(g��)�Ĵ������ݼ{A�Ѓ�(n��i)�ݣ�0809��ݔ��ͨ����IN0��IN7��ݔ��ͨ����D0��D7����ˣ���(zh��)�С�MOVX��DPTR��A��ָ���cA�Ѓ�(n��i)�ݟo(w��)�P(gu��n)����DPTR��ַ��(y��ng)ָ��(d��ng)ǰA��D��ͨ����ַ�� ��EOC����A��D�D(zhu��n)�Q�Y(ji��)����̖(h��o)����(d��ng)����(d��ng)0809A��D�D(zhu��n)�Q��EOCݔ�����ƽ���D(zhu��n)�Q�Y(ji��)����EOCݔ�����ƽ����ʾ�����xȡA��D�D(zhu��n)�Q�Y(ji��)����ԓ��̖(h��o)ȡ�������cMCS��51�͆�Ƭ�C(j��)���_INT0���B�ӣ������l(f��)CPU�Д࣬���Д����(w��)�������xA��D�D(zhu��n)�Q�Ĕ�(sh��)����̖(h��o)����MC5��51�͆�Ƭ�C(j��)�ɂ�(g��)�Д�Դ�����꣬�tEOCҲ���cP1�ڻ��Ŀڵ�һ�l�˾����B���������Дʽ�����ò�ԃ��ʽ�����EOC����ƽ�����xA��D�D(zhu��n)�Qֵ�� ��VREF+��VREF- ������ؓ(f��)����(zh��n)늉�ݔ��ˡ�����(zh��n)늉��ĵ���ֵ��+5v�����c�Դ늉�(+5v)���B�����Դ늉�������һ������(d��ng)����Ӱ�A��D���ȡ���ˣ�����Ҫ���^�ߕr(sh��)�����ø߷�(w��n)���Ȼ���(zh��n)�Դݔ�롣��(d��ng)ģ�M��̖(h��o)늉��^�͕r(sh��)������(zh��n)늉�Ҳ��ȡ����5v�Ĕ�(sh��)ֵ�� ��Vcc�������Դ늉�(+5v)��GND�����ӵضˡ� ADC0809��A/D�D(zhu��n)�Q�^(gu��)�����ڕr(sh��)���̖(h��o)�ąf(xi��)�{(di��o)���M(j��n)�еġ�ADC0809�ĕr(sh��)���̖(h��o)��CLOCK������,������l�ʞ�640MHz,���@��(g��)����l����ADC0809��A/D�D(zhu��n)�Q�r(sh��)�g��100uS���ҡ� A/D�D(zhu��n)�Q�Y(ji��)����,A/D�D(zhu��n)�Q�ĽY(ji��)��(8λ��(sh��)����)�͵����B(t��i)�i��ݔ�����_��,�˕r(sh��)A/D�D(zhu��n)�Q�Y(ji��)��߀�]�ЬF(xi��n)��DB0��DB7�˗l��(sh��)����ݔ������,��Ƭ�C(j��)���ܫ@ȡ֮����Ƭ�C(j��)Ҫ���x��A/D�D(zhu��n)�Q�Y(ji��)��,���ʹADC0809�����Sݔ�����ƶ�OE����ƽ,���_���B(t��i)ݔ���i����,A/D�D(zhu��n)�Q�Y(ji��)�����F(xi��n)��DB0��DB7�ϡ� �D2.4 ADC0809���x����������(d��ng)�Լ�A/D�D(zhu��n)�Q�r(sh��)��D �D2.4��EOC���D(zhu��n)�Q�Y(ji��)��ݔ����̖(h��o)����A/D�D(zhu��n)�Q���g,EOC�S�ָ��ƽ,��(d��ng)A/D�D(zhu��n)�Q�Y(ji��)���r(sh��),EOC׃�ɸ��ƽ��ADC0809��START���յ��½��غ�,���������M(j��n)��A/D�D(zhu��n)�Q,EOC=1,�������t10uS��,���_ʼA/D�D(zhu��n)�Q,EOC׃?y��u)���ƽ����Ƭ�C(j��)�xȡA/D�D(zhu��n)�Q�Y(ji��)���ķ��������N(1)���t��:��Ƭ�C(j��)����(d��ng)ADC0809��,�ӕr(sh��)130uS����,�����x�����_��A/D�D(zhu��n)�Q�Y(ji��)����(2)��ԃ��:EOC��횽ӵ�AT89C51��һ�lI/O���ϡ���Ƭ�C(j��)����(d��ng)ADC0809��,���t10uS,�z�y(c��)EOC,��EOC=0�tA/D�D(zhu��n)�Q�]�нY(ji��)��,�^�m(x��)�z�y(c��)EOCֱ��EOC=1����(d��ng)EOC=1�r(sh��),A/D�D(zhu��n)�Q�ѽ�(j��ng)�Y(ji��)��,��Ƭ�C(j��)�xȡA/D�D(zhu��n)�Q�Y(ji��)����(3)�Д෨:EOC��횽�(j��ng)�^(gu��)���T�ӵ�AT89C51���Д�Ո(q��ng)��ݔ�뾀INT0��INT1��,AT89C51���Д��|�l(f��)��ʽ���½����|�l(f��)����Ƭ�C(j��)����(d��ng)A/D�D(zhu��n)�Q���������������,��(d��ng)A/D�D(zhu��n)�Q�Y(ji��)���r(sh��),EOC��0��1��(j��ng)�^(gu��)���T����INT��,AT89C51�յ��Д�Ո(q��ng)����̖(h��o),��AT89C51�_�Д�,�t�M(j��n)���Д����(w��)����,���Д����(w��)�����І�Ƭ�C(j��)�xȡA/D�D(zhu��n)�Q�ĽY(ji��)���� ��(sh��)��(j��)�ɼ����·��D2.5��ʾ���ضȡ����F��ú�⡢���I��������ݔ���քe�ӵ�ADC0809��IN4��IN5��IN6��IN7��ADC0809��ͨ���x���ַA��B��C�քe��AT89C51��P0��0��P0��2��(j��ng)��ַ�i����74LS373ݔ���ṩ����(d��ng)P2.0=0�r(sh��)���c����̖(h��o)WR��ͬ�xͨADC0809���D��ALE��̖(h��o)�cST��̖(h��o)�B��һ����WR��̖(h��o)��ǰ�،����ַ��̖(h��o)��������؆���(d��ng)�D(zhu��n)�Q�����磬ݔ����ַ7FF8H���xͨͨ��IN4����(sh��)�F(xi��n)��(du��)�ضȂ�����ݔ����ģ�M���M(j��n)���D(zhu��n)�Q��ݔ����ַ7FF9H���xͨͨ��IN1����(sh��)�F(xi��n)��(du��)���F������ݔ����ģ�M���M(j��n)���D(zhu��n)�Q���D��ADC0809���D(zhu��n)�Q�Y(ji��)����B(t��i)��̖(h��o)EOC�ӵ�89C51��INT1���_����(d��ng)A/D�D(zhu��n)�Q��ɺ�EOC׃?y��u)���ƽ����ʾ�D(zhu��n)�Q�Y(ji��)�����a(ch��n)���Дࡣ���Д����(w��)�����У����D(zhu��n)�Q�õĔ�(sh��)��(j��)�͵�ָ���Ĵ惦(ch��)��Ԫ�� 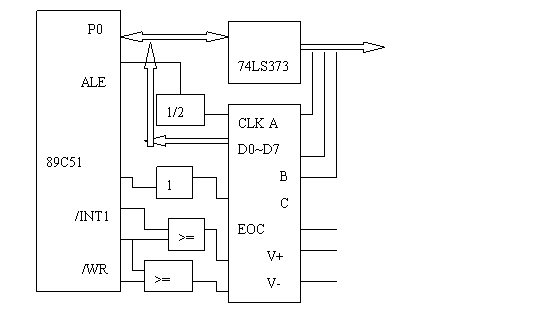 �D2.5 ��(sh��)��(j��)�ɼ�ģ�K �D2.5 ��(sh��)��(j��)�ɼ�ģ�K��Ƭ�C(j��)ϵ�y(t��ng)���õ��I�P�о��a�I�P�ͷǾ��a�I�P�ɷN�� ���a�I�P��ֻҪ��������ijһ��(g��)�I�����ܮa(ch��n)���@��(g��)�I�Ĵ��a���c��ͬ�r(sh��)߀�a(ch��n)��һ��(g��)�}�_��̖(h��o)����֪ͨCPU�����I�a�����a�I�Pʹ�÷��㣬Ҳ���þ���̫��(f��)�s�ij���Ӳ���·��(f��)�s���ȷǾ��a��(ji��n)���I�P�ɱ�Ҫ�ߡ� �Ǿ��a�I�PҲ�Q��(ji��n)���I�P�����İ��I�����г��С��о����ʽ�ġ����I������ֻ�Ǻ�(ji��n)�ε،�(sh��)�F(xi��n)���c(di��n)�Ľ�ͨ����_����˱����һ������(y��ng)�ij����c֮��ϣ����ܮa(ch��n)������(y��ng)���I�a���������ϲ���Ҫ����ʲôӲ���·������Ҫͨ�^(gu��)ܛ����(l��i)��Q�����R(sh��)�e��������(d��ng)�Լ���ήa(ch��n)���I�a�Ć�(w��n)�}�� ���˹�(ji��)�s�ɱ�����ϵ�y(t��ng)�x�ú�(ji��n)���I�P�����̖(h��o)ݔ�롣 ��Ƭ�C(j��)���õ��@ʾ��LED��LCD�ɷN�����O(sh��)Ӌ(j��)���y�Ⱥͳɱ���r(ji��)��(l��i)�f(shu��)LCD��Ҫ����LED������ƷҪ�@ʾ����Ҫ�ܵ�̖(h��o)�a�́�(l��i)��@ʾ��(du��)���C(j��)�ӵ�̖(h��o)�a���锵(sh��)���@ʾ����ˣ�����Ʒ�x������LED�M�ɵ�7�ΰl(f��)���@ʾ�������к�(ji��n)�Ρ���(j��ng)��(j��)�������c��Ƭ�C(j��)�ӿڵȃ�(y��u)�c(di��n)��7��LED�x�õ��ǹ��(y��ng)�O�ġ� 2.1.8CAN�����f(xi��)�hCAN��Controller Area Network���������ַQ����������W(w��ng)����Bosch��˾�ڬF(xi��n)����܇���g(sh��)���I(l��ng)���Ƴ���һ�N�����C(j��)����W(w��ng)��������Խ�����ܣ��O�ߵĿɿ��ԣ���(d��)���`����O(sh��)Ӌ(j��)�͵����ăr(ji��)�F(xi��n)�яV����(y��ng)���ڹ��I(y��)�F(xi��n)��(ch��ng)���ơ����ܴ�B��С�^(q��)��������ͨ���ߡ��t(y��)���x�����h(hu��n)���O(ji��n)�صȱ����I(l��ng)�� CAN��ͨ�Ņf(xi��)�h��Ҫ��CAN��������ɡ�CAN��������Ҫ�Ɍ�(sh��)�F(xi��n)CAN�����f(xi��)�h�IJ��ֺ͌�(sh��)�F(xi��n)�c̎�����ӿڲ��ֵ��·�M�ɡ���(du��)�ڲ�ͬ��̖(h��o)��CAN����ͨ�ſ���������(sh��)�F(xi��n)CAN�f(xi��)�h�����·�ĽY(ji��)��(g��u)���ܴ����ͬ�����c̎�����ӿڲ��ֵĽY(ji��)��(g��u)�ͷ�ʽ����һЩ��� CAN�������x��SJA1000�����������SJA1000�Ǹ��ɶ�CAN�����������ж����Y(ji��)��(g��u)�������L��(w��n)��(y��u)�ș�(qu��n)���ɽM�c�V����(b��o)�Ĺ��ܼ�Ӳ���V�����ܡ�ݔ��r(sh��)��l�ʞ�16MHZ�r(sh��)�,ݔ���ɾ��̿��ơ������ײ��֘�(g��u)�ɣ��ӿڹ���߉���l(f��)�;����������վ�������λ��̎������λ���r(sh��)߉���հl(f��)߉���e(cu��)�`����߉���������ӿ�߉�ȡ� SJA1000���·����һ��(g��)�����ӿ�оƬ��ͨ�^(gu��)����(sh��)�F(xi��n)��λ�C(j��)�c�F(xi��n)��(ch��ng)̎����֮�g�Ĕ�(sh��)��(j��)ͨ�š�ԓ�·����Ҫ������ͨ�^(gu��)CAN�������Ձ�(l��i)����λ�C(j��)�Ĕ�(sh��)��(j��)�M(j��n)�з����M�B(t��i)Ȼ�����o��λ�C(j��)�Ŀ����·��(sh��)�F(xi��n)���ƹ��ܣ���(d��ng)CAN�����ӿڽ��յ���λ�C(j��)���ς���(sh��)��(j��)��SJA1000�ͮa(ch��n)��һ��(g��)�Д࣬���l(f��)̎�����a(ch��n)���Д࣬ͨ�^(gu��)�Д�̎���������ÿһ����Ϣ��ͨ�^(gu��)CAN�����ς��o��λ�C(j��)�M(j��n)�з�����AT89C51��CAN�����ӿ��·�ĺ��ģ���Г�(d��n)CAN�������ij�ʼ����CAN���հl(f��)���Ƶ��΄�(w��)�� CAN�����հl(f��)���x��PCA82C250���鿂���հl(f��)���� PCA82C250��CAN �f(xi��)�h����������������֮�g�Ľӿڡ�82C250 ���Ԟ鿂���ṩ��ͬ�İl(f��)�����ܣ���CAN �������ṩ��ͬ�Ľ������ܡ��������c��ISO 11898����(bi��o)��(zh��n)��ȫ���ݡ�PCA82C250��Ŀ���Ǟ�������ͨ�ž��x�����ϵ�y(t��ng)��˲�g���ɔ_���������o(h��)�������������l�ɔ_��RFI����(sh��)�F(xi��n)����o(h��)�ȡ� �ӿ���ҪԪ���·ԭ��DҊ�D2.6�����M(j��n)���·�O(sh��)Ӌ(j��)�r(sh��)��(y��ng)ע�������c(di��n)����t�_(d��)�����A(y��)�ڵ�Ч���� ��1�������ɶ˱�횽Ӄɂ�(g��)�K��ƥ�����RT�����Ե���������(hu��)ʹ��(sh��)��(j��)ͨ�ŵĿ��ɔ_�Լ��ɿ��Դ�͡� ��2��PCA82C250��CAN����������������֮�g�Ľӿڣ��������ṩ���� ���(d��ng)�l(f��)��������CAN�������IJ��(d��ng)����������TXD��RXD���_�քe�l(f��)�ͽ�(j��ng)�^(gu��)�(q��)��(d��ng)��İl(f��)�ͺͽ�����̖(h��o)�������_8��RS�������x��2�N��ͬ�Ĺ�����ʽ����ԓ���_ֱ���c�����B��ϵ�y(t��ng)��̎�ڸ��ٹ�����ʽ�����@�N��ʽ�£���������l�ɔ_�����hʹ��������|�����������ڲ������^�ͣ������^�̕r(sh��)��һ�����б�ʿ��Ʒ�ʽ���������½���б��ȡ�Q��RS����ֵ����(sh��)�`����15-200k��RS�^�����ȡֵ���������@�N��ʽ�£�����ʹ���p�g������������ϵ�y(t��ng)����ԓ������ʽ���� ��3��SJA1000��TX1�_�ҿգ�RX1���_���λ��횾S���ڼs0.5VCC�ϣ���t�� �������γ�CAN�f(xi��)�hҪ����ƽ߉����ϵ�y(t��ng)��ݔ���x�����h(hu��n)���ɔ_С�����Բ���������x���@�ӿ���ֱ�Ӱ�82C250��VREF�ˣ��s��0.5VCC���cSJA1000��RX1���B���Ķ���(ji��n)�����·�� ��4���O(sh��)Ӌ(j��)�r(sh��)��SJA1000��CLOCKOUT�ĕr(sh��)���̖(h��o)����AT89C51�ĕr(sh��)��·ݔ ��ˣ�����AT89C51���ⲿ�r(sh��)�ݔ�룬��Q�˕r(sh��)�ͬ����(w��n)�}��SJA1000�Д�ݔ����̖(h��o)/INT����AT89C51��/INT0�ˣ�ͨ�^(gu��)�Дʽ�cAT89C51ͨ�š� AT89C51 SJA1000 �D2.6 �ӿ���ҪԪ�����·�D 2.1.9������ģ�K�������f(shu��)�ĸ��N��̖(h��o)�ɼ�ģ�K���ǽ�(j��ng)�^(gu��)��������(l��i)�M(j��n)����̖(h��o)�ɼ������͵�ADC0809�� ��������һ��(g��)��ϵ�y(t��ng)���չ��ʣ�ͨ������һ�N��ʽ�������͵��ڶ���(g��)ϵ�y(t��ng)�е������������@һ���x�������f(shu��)��������һ�N����(��ȡ)���D(zhu��n)�Q�͂�����������������(y��n)����f(shu��)����(y��ng)ԓ�^(q��)�e�z�y(c��)��׃�Q�@�ɂ�(g��)���ǰ��ֻ�nj����y(c��)���D(zhu��n)�Ƶ�ϵ�y(t��ng)��ȥ�������ߏ��������f(shu��)�nj����y(c��)���ķN��Ը�׃���Еr(sh��)����(du��)���y(c��)��ֻ�M(j��n)��һ��׃�Q߀������M(j��n)�еڶ��Ρ�������׃�Q��һֱ����ϣ����������ʽ��ֹ���������D(zhu��n)�Q��������Փ���A(ch��)������������W(xu��)�����W(xu��)�ȸ��N�F(xi��n)���Ч��(y��ng)��(l��i)�M(j��n)��������ʽ��׃�Q���S����Ӻ�Ӌ(j��)��C(j��)���g(sh��)�İl(f��)չ��������ݔ����̖(h��o)����ʽ��(y��ng)�M����������� �������ĽM�ɰ��䶨�xһ����������Ԫ����׃�QԪ���͜y(c��)���·�����ֽM�ɡ�����Դ�͂������⣬߀������o���Դ���ÿ�D��ʾ����D2.7��ʾ���ɈD��֪�������������ׂ�(g��)���ֽM�ɣ� �D2.7 �������ĽM�ɿ�D ��1������Ԫ��(�A(y��)׃�Q��) ֱ�Ӹ��ܱ��y(c��)��(һ�������)�������D(zhu��n)�Q���c���y(c��)���д_���P(gu��n)ϵ����׃�����(�������)����������Ԫ���� ��2���D(zhu��n)�QԪ��(׃�Q��) ���܌�����������ֱ���D(zhu��n)�Q���д_���P(gu��n)ϵ�������Ԫ���� ��3���y(c��)���·(׃�Q�·) ���D(zhu��n)�QԪ��ݔ�������̖(h��o)׃?y��u)����̎�����@ʾ��ӛ䛡����ƵĿ������̖(h��o)���·���y(c��)���·�����ҕ�D(zhu��n)�QԪ���IJ�ͬ��������(j��ng)�����õ���늘��·�����������·���Ӹ��迹ݔ���·���}�_�·����ʎ�·�ȡ� ��4���o���Դ ���o�D(zhu��n)�Q������ 2.2 ܛ��ģ�Kͨ�^(gu��)����������Q���x��C51ϵ�І�Ƭ�C(j��)�������������ô����ܛ��������Ҫ���Ն�Ƭ�C(j��)�Z(y��)�ԣ�C�Z(y��)�Ի�R���Z(y��)�ԁ�(l��i)�������@���x�È�(zh��)��Ч�ʸߵąR���Z(y��)�Ծ����� �_�l(f��)���ߞ�keil c51�����Ĺ���(qi��ng)��֧��c�Z(y��)�ԺͅR���Z(y��)�Եľ����c�{(di��o)ԇ����ܛ��ģ�MI/O��Ҳ��(hu��)�oܛ���{(di��o)ԇ����(l��i)�O��ķ��㡣 2.2.1�ضȟ��F��̖(h��o)�ɼ�ģ�K�M(j��n)�л��(z��i)��(b��o)������Ҫ�ضȺ͟��F�ɂ�(g��)����������(d��ng)�ض��_(d��)��һ���ĶȔ�(sh��)�͟��F�ĝ���_(d��)��һ���İٷֱȕr(sh��)�����M(j��n)�л��(z��i)��(b��o)�����ڱ��O(sh��)Ӌ(j��)�У������x���˔�(sh��)�֜ضȂ�����AS18B20�͟��F������NIS-09C��(l��i)�M(j��n)�Ј�(b��o)���� �є�(sh��)�֜ضȂ�����AS18B20�͟��F������NIS-09C�քe�ӵ�ADC0809IN4�ں�IN5�ڡ���(d��ng)�M(j��n)�л��(z��i)��(b��o)���r(sh��)��ADC0809�͌��ɼ����Ĕ�(sh��)��(j��)��̖(h��o)�惦(ch��)�ڔ�(sh��)��(j��)�^(q��)���M(j��n)��A/D�D(zhu��n)�Q������ָ�ָ����һ��(g��)ͨ���� 2.2.2ú����̖(h��o)�ɼ�ģ�K�M(j��n)��ú���(b��o)���������x���˳��õļ�ͥú���(b��o)��������TP-1.1A����ú�������TP-1.1A�ӵ�ADC0809��IN6�ڡ���(d��ng)�M(j��n)��ú���(b��o)���r(sh��)��ADC0809�͌��ɼ����Ĕ�(sh��)��(j��)��̖(h��o)�惦(ch��)�ڔ�(sh��)��(j��)�^(q��)���M(j��n)��A/D�D(zhu��n)�Q������ָ�ָ����һ��(g��)ͨ���� 2.2.3���I��(b��o)����̖(h��o)�ɼ�ģ�K���w�к㶨���w�أ�һ����37�z�϶ȣ����ԕ�(hu��)�l(f��)���ض����L(zh��ng)�ļt�⾀�����ጼt�������̽�^���ǿ�̽�y(c��)���w�l(f��)��ļt�⾀���M(j��n)�й��������w�l(f��)���ļt�⾀��ͨ�^(gu��)�������V��Ƭ����(qi��ng)�ۼ����t��Б�(y��ng)Դ�ϡ����ʽԪ���ڽ��յ����w�t��ݗ��ضȰl(f��)��׃���r(sh��)����(hu��)ʧȥ늺�ƽ�⣬����ጷ�늺ɣ����m(x��)�·��(j��ng)�z�y(c��)̎����a(ch��n)����(b��o)����̖(h��o)���M(j��n)�з��I��(b��o)���r(sh��)�������x���˃r(ji��)����^���m�ğ��ጼt�������RE200B����(d��ng)���w�������ጼt�������RE200B��һ�����x�r(sh��)�����ጼt��������͕�(hu��)��(b��o)����ADC0809�͕�(hu��)���ɼ�����̖(h��o)�惦(ch��)�ڔ�(sh��)��(j��)�^(q��)���M(j��n)��A/D�D(zhu��n)�Q�� 2.2.4���(b��o)�����Ă�(g��)�l(f��)����O�ܷքe����AT89C51��P1��4��P1��7�ڡ�P1��4��P1��7�ڿ��Ƶğ����Ξ�������̖(h��o)����ú����̖(h��o)�������(z��i)��̖(h��o)���ͷ��I��̖(h��o)������(d��ng)�@Щݔ����ݔ�����ƽ�r(sh��)����(du��)��(y��ng)����̖(h��o)�����(hu��)�l(f��)���(b��o)���� 2.2.5��̖(h��o)�ɼ�ģ�K��(sh��)��(j��)�ɼ����ֵij����O(sh��)Ӌ(j��)�������(q��)��(d��ng)ADC0809��IN4��IN5��IN6��IN7�M(j��n)��A/D�D(zhu��n)�Q���քe���ӳ���ADC1(�ض��D(zhu��n)�Q)��ADC2(���F����D(zhu��n)�Q)��ADC3��ú�����D(zhu��n)�Q����ADC4�����I�D(zhu��n)�Q����ɣ���Ƭ�C(j��)�����D(zhu��n)�Q�õĔ�(sh��)��(j��)������ָ����(n��i)���Ԫ����INT1�Д����(w��)������ɡ�ÿ���(q��)��(d��ng)A/D�D(zhu��n)�Q��ȴ��ⲿ�Д�1���Дൽ��(l��i)�f(shu��)��A/D�D(zhu��n)�Q�ѽ�(j��ng)��ɣ�ͨ�^(gu��)�Д����(w��)�����xȡ�D(zhu��n)�Q�õ��Ĕ�(sh��)��(j��)�� ��(sh��)��(j��)�ɼ�ģ�K�Ĺ���ԭ������������ɼ�����(sh��)��(j��)��ģ�M�����͵�ADC0809��0809���D(zhu��n)�Q�ɵĔ�(sh��)�������o89C51������Ƭ�C(j��)���ɼ����Ĕ�(sh��)��(j��)�͵�SJA1000ͨ�^(gu��)CAN�����հl(f��)��82C250���Ͽ�������ɔ�(sh��)��(j��)�ɼ�����������CAN ����ͨ�^(gu��)RS232���o��λ�C(j��)�� 2.2.6�I�P�@ʾģ�K ����Ԫ��Ҫ�ɂ�(g��)���пڣ�һ��(g��)��������̖(h��o)ݔ�������c�@ʾ����λ�x�a����һ��(g��)�ڣ��@�������x��P2�ڵ�P2.2��P2.3����һ��(g��)��������̖(h��o)���x��ڣ��@���x��P0�ڵ�ǰ��λP2.4��P2.7�� 2.2.7CAN����ͨӍģ�KCAN�����y(c��)��ϵ�y(t��ng)��ͨ��ܛ���֞�3���֣�CAN��ʼ������(sh��)��(j��)�l(f��)�ͺ͔�(sh��)��(j��)���ա� CAN��ʼ��������Ҫ���O(sh��)��CAN��ͨ�Ņ���(sh��)����Ҫ��ʼ���ļĴ����У�ģʽ�Ĵ�����Peli CANģʽ�����r(sh��)�ּĴ��������մ��a�Ĵ��������μĴ������������r(sh��)�Ĵ�����ݔ�����ƼĴ����ȡ���Ҫע����ǣ��@Щ�Ĵ����H���ڏ�(f��)λ���g�Ɍ��L�����,�ڌ�(du��)�@Щ�Ĵ�����ʼ��ǰ����횴_��ϵ�y(t��ng)�M(j��n)���ˏ�(f��)λ��B(t��i)������ϵ�y(t��ng)�и�CAN�������Ŀ������r(sh��)�Ĵ����ij�ʼ���ֱ����ͬ�� ��(sh��)��(j��)�l(f��)�ͣ��F(xi��n)��(ch��ng)�ĸ��������ѭh(hu��n)��������(sh��)�ęz�y(c��)��̖(h��o)����(sh��)������ģ�M�����_�P(gu��n)�����M(j��n)���D(zhu��n)�Q̎���l(f��)��CAN�������İl(f��)�;��_�^(q��)��Ȼ��(d��ng)CAN�������İl(f��)������˕r(sh��)CAN���������Ԅ�(d��ng)���l(f��)�͔�(sh��)��(j��)����������������������M(j��n)�и��A(y��)�� ��(sh��)��(j��)���գ�����(g��)�C(j��)�y(c��)��ϵ�y(t��ng)�е�CAN�������z�y(c��)���������Д�(sh��)��(j��)�r(sh��)��(hu��)�Ԅ�(d��ng)���տ����ϵĔ�(sh��)��(j��)����������վ��_�^(q��)������AT89C51�������l(f��)�ͽ����Д࣬����(d��ng)�Д���շ���(w��)����AT89C51ͨ�^(gu��)��(zh��)���Д���շ���(w��)����CAN�������Ľ��վ��_�^(q��)�xȡ��(sh��)��(j��)������(du��)���M(j��n)���M(j��n)һ��̎�������� 3 Ӳ����Ԫ�·�O(sh��)Ӌ(j��)3.1 ADC0809���Ă�(g��)��(b��o)���������Ľӿ��·�O(sh��)Ӌ(j��)ADC0809���Ă�(g��)��(b��o)���������Ľӿ��·�O(sh��)Ӌ(j��)�D��D3.1��ʾ�� �D3.1 ADC0809�͂������Ľӿ��·�D �ψD��ʾ���Ă�(g��)���?l��)քe����ضȂ����������F��������ú��������ͷ��I����������?y��n)�������M(j��n)�Ј�(b��o)���r(sh��)��Ҫ�����������ڲ�ͬ��λ�ӣ��������O(sh��)Ӌ(j��)�·�D�r(sh��)�����߾��x�ò�ᘣ��@�ӣ���ܛ���Ѳ���c�������B������(l��i)���@�ø��ӷ��㣬���Ԍ�������������Ҫ��λ�ӡ� Ԫ�������xȡ�� ADC0809оƬһ�K ���?bi��o)Ă�(g��)�����Ų�ᘃɂ�(g��)�����Ų��ۃɂ�(g��)�� 47K�����һ��(g��)��51�Wķ�����һ��(g��)��50K�����ɂ�(g��) 3.2 AT89C51�cADC0809�ӿ��·AT89C51�cADC0809�ӿ��·��3.2��ʾ�� �D3.2 AT89C51�cADC0809�ӿ��·�D ADC0809��ͨ���x���ַA��B��C�քe��AT89C51��P0��0��P0��2��(j��ng)��ַ�i����74LS373ݔ���ṩ����(d��ng)P2.7=0�r(sh��)���c����̖(h��o)WR��ͬ�xͨADC0809���D��ALE��̖(h��o)�cST��̖(h��o)�B��һ����WR�� ̖(h��o)��ǰ�،����ַ��̖(h��o)��������؆���(d��ng)�D(zhu��n)�Q��ADC0809���D(zhu��n)�Q�Y(ji��)����B(t��i)��̖(h��o)EOC�ӵ�AT89C51��INT1���_����(d��ng)A/D�D(zhu��n)�Q��ɺ�EOC׃?y��u)���ƽ����ʾ�D(zhu��n)�Q�Y(ji��)�����a(ch��n)���Дࡣ���Д����(w��)�����У����D(zhu��n)�Q�õĔ�(sh��)��(j��)�͵�ָ���Ĵ惦(ch��)��Ԫ�� AT89C51���l�ʸ�ADC0809���l�ʲ�һ�£������x��74LS74�M(j��n)�ж����l�� Ԫ�������xȡ�� AT89C51��Ƭ�C(j��)һ�K ADC0809оƬһ�K 74LS74оƬһ�K 74LS02оƬһ�K 74LS04оƬ�ɉK 3.3 AT89C51�c���(b��o)���ӿ��·AT89C51�c���(b��o)���ӿ��·��D3.3��ʾ �D3.3 AT89C51�c���(b��o)���ӿ��·�D ���Ă�(g��)�l(f��)����O�ܷքe����AT89C51��P1��4��P1��7�ڡ�P1��4��P1��7�ڿ��Ƶğ����Ξ�������̖(h��o)����ú����̖(h��o)�������(z��i)��̖(h��o)���ͷ��I��̖(h��o)������(d��ng)�M(j��n)��һ�N��(b��o)���r(sh��)������(du��)��(y��ng)�İl(f��)����O�ܾ͕�(hu��)�������磬��(d��ng)�M(j��n)�л��(z��i)��(b��o)���r(sh��)��P1.6�ڵİl(f��)����O�ܾ͕�(hu��)���� Ԫ�������xȡ�� �Ă�(g��)340�Wķ����� �Ă�(g��)�l(f��)����O�� 3.4 �I�P�@ʾ�ӿ��·�I�P�@ʾ�ӿ��·��D3.4��ʾ�� �D3.4 �I�P�@ʾ�ӿ��·�D ���w���跨����1����ȫ���о�Y0-Y3���У��õ��ƽ��Ȼ��z�y(c��)�еĠ�B(t��i)��ֻҪ��һ�е��ƽ��ͣ��t��ʾ���I�����I�����£������]�ϵ��Iλ�ڵ��ƽ�c4���о��ཻ���4��(g��)���I֮�С��������о�������ƽ���t�I�P�Л]���I���¡���2���Д��]���I���ڵ�λ�á��ڴ_���а��I�����ԺͿ����M(j��n)��_�����w�]���I���^(gu��)�̡��䷽���ǣ����Ό��о��õ��ƽ��������ij���о�����ƽ�r(sh��)���侀����ƽ���ڴ_��ij���о�λ�Þ���ƽ���ٌ��Йz�y(c��)���е��ƽ��B(t��i)������ͣ��tԓ�о��c�Þ���ƽ���о�����̎�İ��I�����]�ϵİ��I�� Ԫ�������xȡ�� ���I�x���҂���Ϥ�����_���ΰ��I8��(g��) 9012PNP�Ŵ����O��4��(g��) ��λ���(y��ng)LED��(sh��)�a��һ�K 4.7k���������4��(g��) 3.5 AT89C51�cCAN�����ӿ��·AT89C51�cCAN�����ӿ��·�D��D3.5��ʾ�� �D3.5 AT89C51�cCAN�����ӿ��·�D ��ϵ�y(t��ng)�У�SJA1000��Ƭ�x��̖(h��o)һ���ɵ�ַ������(j��ng)�g�a�@�ã����ɴ˛Q����CAN���������Ĵ����ĵ�ַ���ڱ��O(sh��)Ӌ(j��)�У������Æ�Ƭ�C(j��)AT89C51��P2.7��Ƭ�x��̖(h��o)�����ԣ�SJA1000�ĵ�ַ�飺7F00-7F32H�� SJA1000��TX1�_�ҿգ�RX1���_���λ��횾S���ڼs0.5Vcc�ϣ���t���������γ�CAN�f(xi��)�h��Ҫ����ƽ߉�����ϵ�y(t��ng)��ݔ���x�����h(hu��n)���ɔ_С�����Բ���������x���@�ӿ�ֱ�Ӱ�82C250��VREF�ˣ��s��0.5 Vcc���cRX1�_���B���Ķ���(ji��n)�����·�� ��(d��ng)��늏�(f��)λ�r(sh��)��AT89C52����늏�(f��)λ����Ҫ�ĵ͵��ߵ��ƽ׃����(l��i)�����SJA1000��17�_RST�������Ҫ���F(xi��n)һ��(g��)�ɸ��ƽ�����ƽ����׃����ˣ��@��횼�һ��(g��)�������� 82C50��8�_�c��֮�g�����Rs�Q��б����裬����ȡֵ�Q����ϵ�y(t��ng)̎�ڸ��ٹ�����ʽ߀��б�ʿ��Ʒ�ʽ�����ڲ������^�͡������^�̕r(sh��)��һ�����б�ʿ��Ʒ�ʽ���������½���б��ȡ�Q�������ֵ����(sh��)�(y��n)��(sh��)��(j��)����15~200k����Rs�^�����ȡֵ��������ԓ��ʽ�£�����ʹ��ƽ�о����p�g�����������ڱ��O(sh��)Ӌ(j��)�У�Rs�x��150K�� Ԫ�������xȡ�� SJA1000оƬһ�K PCA82C250оƬһ�K 74LS04оƬһ�K 16MHZ����һ��(g��) 22PF�Ķ��O�܃ɂ�(g��) 60�Wķ�����һ��(g��) 150K�����һ��(g��) 4 ܛ���O(sh��)Ӌ(j��)��ϵ�y(t��ng)��ܛ���O(sh��)Ӌ(j��)��Ҫ�Dzɼ��Ă�(g��)��(b��o)���������Ĉ�(b��o)����̖(h��o)����ͨ�^(gu��)�l(f��)����O���@ʾ��ÿһ��(g��)�l(f��)����O�����ͱ�ʾ��һ�N��(b��o)����������(b��o)�����Ñ����Ը���(j��)�Լ���ͥ�ľ��w��r��(l��i)�O(sh��)�È�(b��o)��������ȣ����I�P�@ʾ��(l��i)��(sh��)�F(xi��n)����Ƭ�C(j��)߀Ҫ�Ѳɼ�����̖(h��o)ͨ�^(gu��)CAN������ݔ?sh��)���λ�C(j��)������λ�C(j��)���@ʾ����(l��i)�� 4.1 CAN��������CAN�����y(c��)��ϵ�y(t��ng)��ͨ��ܛ���֞�3���֣�CAN��ʼ������(sh��)��(j��)�l(f��)�ͺ͔�(sh��)��(j��)���ա� 4.1.1CAN��ʼ��CAN��ʼ��������Ҫ���O(sh��)��CAN��ͨ�Ņ���(sh��)����Ҫ��ʼ���ļĴ����У�ģʽ�Ĵ�����Peli CANģʽ�����r(sh��)�ּĴ��������մ��a�Ĵ��������μĴ������������r(sh��)�Ĵ�����ݔ�����ƼĴ����� CAN��ʼ��������a�飺 - #include <reg52.h>
- #include <stdio.h>
- #include <string.h>
- #include <absacc.h>
- #define byte unsigned char
- #define word unsigned int
- #define time0 65536-2000
- #define BAUD -13
- #define MAIN 1 ///���x���C(j��)���ęC(j��)��ַ
- #define ADDR 2
- #define READ 'R'
- #define WRIT 'W'
- #define CAN_PORT P0
- #define CAN_CR 0 //����
- #define CAN_CMR 1 //����
- #define CAN_SR 2 //��B(t��i)
- #define CAN_IR 3 //�Д�
- #define CAN_ACR 4 //�(y��n)��
- #define CAN_AMR 5 //����
- #define CAN_BTR0 6 //�r(sh��)��0
- #define CAN_BTR1 7 //�r(sh��)��1
- #define CAN_OCR 8 //ݔ��
- #define CAN_TXB 10 //�l(f��)�;��_
- #define CAN_RXB 20 //���վ��_
- #define CAN_CDR 31 //���l
-
- sbit CAN_WR = P2^5;
- sbit CAN_RD = P2^6;
- sbit CAN_ALE = P2^7;
- sbit CAN_RST = P1^0;
-
- sbit da_in = P3^7;
- sbit da_clk = P3^6;
- sbit da_cs = P3^5;
-
- sbit KEY1 = P2^0;
- sbit KEY2 = P2^1;
- sbit LED1 = P1^3;
- sbit LED2 = P1^4;
- sbit LED7 = P1^7;
- sbit beer = P1^1;
- bit CANBUS;
- byte bdata Acc ;
- sbit Acc7=Acc^7;
- byte idata TXB[10]={1,2,3,4,5,6,7,8,9,10}; //��һ��(g��)���(b��o)�Ę�(bi��o)־�a
-
- byte idata RXB[10];
- void CAN_INI() /*��ʼ������*/
- {
- CANW(CAN_CR,0x01);
- CANW(CAN_ACR,MAIN); //�(y��n)�՞V�������c��(b��o)�Ę�(bi��o)־�a(�ęC(j��)�İl(f��)�͵ĵ�һ��(g��)�ֹ�(ji��))һ��
- CANW(CAN_AMR,0x00);
- CANW(CAN_BTR0,0x42); //125k-BPS
- CANW(CAN_BTR1,0x1c);
- CANW(CAN_OCR,0x1A); //0xaa,0xd2,0xfa
- CANW(CAN_CR,0x02); //**�Д�ʹ��
- }
- 4.1.2CAN��(sh��)��(j��)�l(f��)��
- ��(sh��)��(j��)�l(f��)�ͣ��F(xi��n)��(ch��ng)�ĸ��������ѭh(hu��n)��������(sh��)�ęz�y(c��)��̖(h��o)����(sh��)������ģ�M�����_�P(gu��n)�����M(j��n)���D(zhu��n)�Q̎���l(f��)��CAN�������İl(f��)�;��_�^(q��)��Ȼ��(d��ng)CAN�������İl(f��)������˕r(sh��)CAN���������Ԅ�(d��ng)���l(f��)�͔�(sh��)��(j��)����������������������M(j��n)�и��A(y��)��
- CAN��(sh��)��(j��)�l(f��)�͵ij�����a�飺
- void CANW(byte adr,byte dat) //��CAN��(sh��)
- {
- CAN_ALE=1;
- CAN_PORT=adr;
- CAN_ALE=0;
- CAN_WR=0;
- CAN_PORT=dat;
- CAN_WR=1;
- }
-
- byte CANR(byte adr) //�xCAN��(sh��)
- {
- byte dat;
- CAN_ALE=1;
- CAN_PORT=adr;
- CAN_ALE=0;
- CAN_PORT=0xff;
- CAN_RD=0;
- dat=CAN_PORT;
- CAN_RD=1;
- return dat;
- }
-
- void CAN_SEND() /*�l(f��)�͔�(sh��)��(j��)����*/
- {
- byte i,p;
- p=CANR(CAN_SR);
- if (p&0x04)
- {
- p=CAN_TXB; /*pָ��l(f��)�;�����ַ*/
- for(i=0;i<10;i++) CANW(p++,TXB[i]);
- CANW(CAN_CMR,0x01); /*Ո(q��ng)��l(f��)��*/
- }
- }
- 4.1.3CAN���Ք�(sh��)��(j��)
- ��(sh��)��(j��)���գ�����(g��)�C(j��)�y(c��)��ϵ�y(t��ng)�е�CAN�������z�y(c��)���������Д�(sh��)��(j��)�r(sh��)��(hu��)�Ԅ�(d��ng)���տ����ϵĔ�(sh��)��(j��)����������վ��_�^(q��)������AT89C51�������l(f��)�ͽ����Д࣬����(d��ng)�Д���շ���(w��)����AT89C51ͨ�^(gu��)��(zh��)���Д���շ���(w��)����CAN�������Ľ��վ��_�^(q��)�xȡ��(sh��)��(j��)������(du��)���M(j��n)���M(j��n)һ��̎��������
- CAN���Ք�(sh��)��(j��)����?y��n)�?br />
- void CAN_INT() interrupt 0 using 1/*������*/
- {
- byte i,p;
- p=CANR(CAN_IR);
- if(p&0x01)
- {
- p=CAN_RXB;
- for(i=0;i<10;i++)
- {
- RXB[i]=CANR(p++);
- }
- CANW(CAN_CMR,0x04); /*ጷŽ��վ���*/
- CANBUS=1;// LED2=1;
- }
- }
- void CAN_SCAN()
- {
- TXB[0]=ADDR;
- TXB[1]=8;
- TXB[2]=ADDR;
- TXB[3]=WRIT;
- TXB[4]=2;
- if(KEY1==0) TXB[5]=0; else TXB[5]=1;
- if(KEY2==0) TXB[6]=0; else TXB[6]=1;
- CAN_SEND();
- // while(!CANBUS); //�ȴ��������(bi��o)־
- CANBUS=0;
- TXB[0]=ADDR; //������ַ
- TXB[1]=8; //�l(f��)�͔�(sh��)��(j��)�ֹ�(ji��)��(g��)��(sh��)!
- TXB[2]=ADDR;
- TXB[3]=READ;
- TXB[4]=2;
- CAN_SEND();
- // while(!CANBUS);
- CANBUS=0;
- if(RXB[5]==0) LED1=0; else LED1=1;
- if(RXB[6]==0) LED2=0; else LED2=1;
- }
- 4.2 �ضȂ�����18B20
- DS18B20�ij���Ҋ�������
- 4.3 ADC0809�D(zhu��n)�Q
- ADC0809���D(zhu��n)�Q����?y��n)�?br />
- #include <reg51.h>
- #define uchar unsigned char
- #define uint unsigned int
- //#define t0 65536-50000
- //#define t1 65536-30000
- sbit key3 =P2^3;
- sbit key2 =P2^2;
- sbit key1 =P2^1;
- sbit key0 =P2^0;
- sbit P30= P3^0;
- sbit P31= P3^1;
- sbit P32= P3^2;
- sbit P33= P3^3;
- sbit P34= P3^4;
-
- //uchar scan=0,dis=0,keyx=1,key;
- uchar now;
- uchar code scantab[4] ={0x80,0x40,0x20,0x10};
- uchar code disptab[4] ={0x01,0x80,0x40,0x20};
- uchar n[4] ={0x00,0x00,0x00,0x00};
- uchar code trantab[18] =
- { 0x28,0xEE,0x32,0xA2,0xE4,0xA1,0x21,
- 0xEA,0x20,0xA0,0x60,0x25,0x39,0x26,
- 0x31,0x71,0x29,0xff
- };
- int dispnum;
- sbit start=P3^1;
- sbit oe=P3^2;
- #define t0 65536-1000
- bit flag;
- unsigned long uin,udis;
- /*
- int temp;
- int get_p1() {P1=0xff;return P1;}
- int get_p3() {P3=0xff;return P3;}
- void put_p1(int h1) {P1=h1;}
- void put_p3(int h2) {P3=h2;}
- */
- void delay(uint t)
- { uint i;
- for(i=0;i<t;i++);
- }
- /*
- void dealkey()
- { if(key>0)
- { switch(key)
- { case 1: P3^0=0; break;
- case 5: P3^0=1; break;
- case 2: P3^1=0; break;
- case 6: P3^1=1; break;
- case 3: clock=0; break;
- case 7: clock=1; break;
- case 4: P3^3=0xff;dispnum=P3^3; break;
- case 8: P3^3=temp; break;
- case 9: P31=1; break;
- case 13: P31=1; break;
- case 10: P33=1;dispnum=P33; break;
- case 14: temp=get_p1(); dispnum=temp; break;
- case 11: temp=get_p1(); dispnum=5*P1/255;
- break;
- case 15: break;
- case 12: P32=0; break;
- case 16: P32=!P32; break;
- }
- if(dispnum<0) dispnum=0;
- if(dispnum>9999) dispnum=9999;
- distran(dispnum);
- }
- key=0;
- }
- */
- void distran(int dispnum)
- { n[0] =trantab[dispnum %10];
- n[1] =trantab[(dispnum/10) %10];
- n[2] =trantab[(dispnum/100) %10];
- n[3] =trantab[(dispnum/1000) %10];
- }
- void display()
- { P2=~disptab[now];
- P0=n[now];
- }/*
- void scankey()
- { P0=trantab[17];
- now=(now+1)%4;
- P2=~scantab[now];
- key0=key1=key2=key3=1;
- if(!key0)keyx=now+1;
- if(!key1)keyx=now+5;
- if(!key2)keyx=now+9;
- if(!key3)keyx=now+13;
- }
- */
- void t0_sever() interrupt 1
- { TH0=t0>>8;TL0=t0;
- // scankey();
- // dealkey();
- display();
- flag=0;
- }
-
- /*
- void t1_sever() interrupt 2
- { TH1=t1>>8;TL1=t1;
- //scankey();
- //dealkey();
- display();
- }
- */
- void deal0809()
- { unsigned long u;
- u=(unsigned long)uin;
- udis=((u*5*1000)/256);
- distran(udis);
- }
- void get0809()
- { //delay(80);
- start=1;//f=(double)((fxx*200000000)/(fcc*16));
- delay(8);
- start=0;
- delay(50);
- oe=1;
- P1=1;
- uin=P1;
- oe=0;
- }
- void main()
- {
- start=0;
- oe=0;
- flag=0;
- EA=1;
- ET0=1; TH0=t0>>8; TL0=t0; TR0=1;
- now=0;
- while(1)
- {
- if(flag)display();
- else
- { get0809();
- deal0809();
- //display();
- }
- }
- }
- /*
- if(keyx>0)
- { key=keyx;
- while(keyx!=0){keyx=0;time(10000);}
- dealkey();
- }
- time(10000);
- */
- 4.4 ��(sh��)���@ʾ
- ��ģ�K������Ҫ��С�^(q��)��ͥ�Ñ�����(j��)�Լҵ���r�@ʾ��ͬ�ļ�ͥ�T��̖(h��o)�a�����w������a�飺
- #include <reg51.h>
- #define uint unsigned int
- #define uchar unsigned char
- #define tim 65536-3000
- sbit dis0 =P2^7;
- sbit dis1 =P2^6;
- sbit dis2 =P2^5;
- sbit dis3 =P2^4;
- sbit key1 =P2^3;
- sbit key0 =P2^2;
- int i;
- uchar disp[4],dis;
- uchar key,keyx,ts;
- uint para[8],ptr;
- uchar code numtab[4]={0x80,0x40,0x20,0x10};
- uchar code distab[16]={0x28,0xee,0x32,0xa2,0xe4,0xa1,0x21,0xea,
- 0x20,0xa0,0x60,0x25,0x39,0x26,0x31,0x71};
- int code param[8]={300,255,300,255,255,255,255,8};
- void time(uint t)
- {
- uint j;
- for(j=0;j<t;j++);
- }
-
- void distran()
- {
- disp[0]=distab[para[ptr]%10];
- disp[1]=distab[(para[ptr]/10)%10];
- disp[2]=distab[(para[ptr]/100)%10];
- disp[3]=distab[(para[ptr]/1000)%10];
- }
- void display()
- {
- dis=(dis+1)%4;
- P2=0xff;
- P0=disp[dis];
- P2=~numtab[dis];
- key0=1; key1=1;
- if(!key0) keyx=dis+1;//*************************�I�P����
- if(!key1) keyx=dis+5;
- }
- void keyproc()
- {
- if(key>0)
- {
- switch(key)
- {
- case 1: para[ptr]--; break;
- case 5: para[ptr]++; break; //************��(g��)λ
- case 2: para[ptr]-=10; break;
- case 6: para[ptr]+=10; break; //*************ʮ
- case 3: para[ptr]-=100; break;
- case 7: para[ptr]+=100; break; //**************��
- case 4: ptr--; break;
- case 8: ptr++; break; //*********ǧλ
- }
- if(ptr>7) ptr=0;
- if(ptr<0) ptr=7;
- if(para[ptr]<0) para[ptr]=0;
- if(para[ptr]>param[ptr]) para[ptr]=param[ptr];
- distran();
- key=0;
- }
- }
- void timer0() interrupt 1
- {
- TH0=tim>>8; TL0=tim; display();
- }
- void main()
- {
- TMOD=0x11;IE=0x82;
- dis=0;
- ptr=0;
- distran();
- TH0=tim>>8; TL0=tim; TR0=1;
- for(i=0;i<7;i++) para[i]=i;
- for(;;)
- {
- if(keyx>0) //���I����
- {
- key=keyx;
- while(keyx!=0) {keyx=0; time(1000);}
- if(keyx!=0)
- {
- /// if(!key0) {keyx=dis+1;}//*************************�I�P����
- //// if(!key1) {keyx=dis+5;}
- }
- keyproc();
- }
- time(1000);
- }
- }
5 ϵ�y(t��ng)�ɿ����O(sh��)Ӌ(j��)С�^(q��)����ϵ�y(t��ng)�Ĉ�(b��o)��Ҫ���(zh��n)�_�o(w��)�`������ǿɿ��ģ���˿ɿ�����һ��(g��)����Ҫ��ָ��(bi��o)����ˣ�ϵ�y(t��ng)��Ӳ���·��ܛ��ϵ�y(t��ng)���O(sh��)Ӌ(j��)����(y��ng)���@�@��(g��)�����M(j��n)�С� 5.1 ϵ�y(t��ng)���ɔ_���O(sh��)Ӌ(j��)С�^(q��)����ϵ�y(t��ng)��Ҫ�M(j��n)��С�^(q��)��(n��i)����(g��)ס���ĸ��Nͻ�l(f��)�¼��Ĉ�(b��o)������̖(h��o)��(hu��)�ܵ����N�ɔ_��ʹϵ�y(t��ng)�������������� �ڿ��ɔ_���棬��Ӳ����ʩ��ܛ����ʩ��Ҳ��ܛӲ���Y(ji��)�ϵĴ�ʩ��Ӳ�����ɔ_��Ч�ʸߵ��Ѓ�(y��u)�c(di��n)����������ϵ�y(t��ng)��Ͷ�Y���O(sh��)����w�e��ܛ�����ɔ_��Ͷ�Y�͵ă�(y��u)�c(di��n)������(hu��)����ϵ�y(t��ng)�Ĺ���Ч�ʡ� 5.1.1Ӳ�����ɔ_��ʩ�ɔ_�������У����ϵ�y(t��ng)�ĸɔ_���^(gu��)��ͨ���ĸɔ_�����g�ĸɔ_�ȡ���ӡˢ�·���O(sh��)Ӌ(j��)�r(sh��)�����]���·���^(gu��)��r(sh��)��ӡˢ���l�L(zh��ng)�����������½����^(gu��)С�r(sh��)��ɢ��ã��������������ɔ_�����б�ϵ�y(t��ng)�O(sh��)Ӌ(j��)�·��r(sh��)�������P(gu��n)�������M���ſ���Щ�����a(ch��n)����������������·��������·�M���h(yu��n)�x��Ƭ�C(j��)��ͬ�r(sh��)����(g��)ϵ�y(t��ng)��һ��(g��)�Դ�������C�����õĹ��ء� 5.1.2ܛ�����ɔ_��ʩܛ�����ɔ_���چ�Ƭ�C(j��)ϵ�y(t��ng)���������О飬��ǰ��l���ǣ�ϵ�y(t��ng)�п��ɔ_ܛ������(hu��)��ɔ_���p�ġ� ��1������Y(ji��)��(g��u)��������ģ�K�� ���̕r(sh��)���������������D(zhu��n)����t����(g��)�����(hu��)�m�p��һ�𣬱��ڳ���S�o(h��)�����Ҍ�(du��)ܛ�����ɔ_�����Č�(sh��)ʩ����ʮ����Ҫ�����x����ϵ�y(t��ng)�а�����(g��)����ֽ�����ɂ�(g��)����ģ�K��ÿ��(g��)����ģ�K��һ��(g��)��Ҏ(gu��)���� ��2����B(t��i)��̖(h��o)�Ŀ��ɔ_ݔ�뷽�� �ɔ_��̖(h��o)���ë�̠���Õr(sh��)�g�̣��ڲɼ�ijһ��B(t��i)��̖(h��o)�r(sh��)�����Զ���؏�(f��)�ɼ���ֻ���B�m(x��)�ɴβɼ��Y(ji��)��һ�r(sh��)��ҕ����Ч���ڸ��βɼ���B(t��i)��̖(h��o)֮�g����һ���ӕr(sh��)���܌�(du��)���^���ĸɔ_�� ��3��CPU���ɔ_���g(sh��) CPU���ڸ��ٔ�(sh��)�����������ܸɔ_�����\(y��n)�������������Լ����ƼĴ�������(d��ng)���ɔ_����r(sh��)���ܿ���ͨ�^(gu��)�������Č�CPU�Ĵ����ă�(n��i)�ݣ���(d��o)�³�ʼ���e(cu��)�`����ַʧ������ϵ�y(t��ng)�c������(d��ng)�����ܵ��ɔ_�Ϳ��ܴ�yCPU��������(zh��)�г�������r��ʧȥ���Ƶij������̣����ʹϵ�y(t��ng)�ēpʧ�p�٣��M���ܻ֏�(f��)ϵ�y(t��ng)��������B(t��i)�DZ�ϵ�y(t��ng)��Ҫ���]��һ�(xi��ng)��Ҫ��(n��i)�ݡ� ϵ�y(t��ng)��ȡ�Ĵ�ʩ���ڸ��γ����У���(du��)��Ƭ�C(j��)��Ƭ��U(ku��)չ�����ĸ��N���ܡ���ڡ���ʽ����B(t��i)�Ȳɼ������Ի��R�r(sh��)�Ե��O(sh��)�á�ϵ�y(t��ng)���HҪ���C��늺�ϵ�y(t��ng)Ҫ��ʼ���������ڳ�����ÿ��ʹ��ij�N���ܣ���Ҫ��һ�Ό�(du��)����(y��ng)�Ŀ��ƼĴ����O(sh��)����(d��ng)��ģʽ�� 5.2 ���Ԫ�����Ŀɿ�����߆�Ƭ�C(j��)��(y��ng)��ϵ�y(t��ng)������Ԫ�����|(zh��)���������ϵ�y(t��ng)��(n��i)�ڵĿɿ��ԣ��@Ҳ���P(gu��n)�I�ԵĴ�ʩ����ȡ�Ĵ�ʩ�У� ��1���x���|(zh��)���õĽӲ�������O(sh��)Ӌ(j��)�ù�ˇ�Y(ji��)��(g��u)�����x�Î����εĽӲ���� ��2���x�úϸ�����Ԫ�������M(j��n)�Ї�(y��n)��Ĝy(c��)ԇ���Y�x�� ��3���O(sh��)Ӌ(j��)�r(sh��)�����g(sh��)����(sh��)����һ���������� ��4�����ӡˢ��ĽM�b�|(zh��)���� 5.3 ���e(cu��)���g(sh��)�����ϵ�y(t��ng)�ɿ��Ե�ͬ�r(sh��)����ȡһЩ���e(cu��)���g(sh��)����(d��ng)ϵ�y(t��ng)�������e(cu��)�r(sh��)��ϵ�y(t��ng)���Ԅ�(d��ng)�m���e(cu��)�`����ϵ�y(t��ng)����Ҫ��(y��ng)������Ϣ���༼�g(sh��)�� ��1����żУ�(y��n)��ϵ�y(t��ng)ͨ�ŕr(sh��)����żУ�(y��n)���շ�����(j��)У�(y��n)�Y(ji��)�����Q���Ƿ�Ҫ��(du��)���ذl(f��)�� ��2��ѭ�h(hu��n)�aУ�(y��n)���ڰl(f��)�͔�(sh��)��(j��)�r(sh��)��һ����Ҏ(gu��)�t�a(ch��n)��ѭ�h(hu��n)����a���������ڔ�(sh��)��(j��)��һ��l(f��)�ͣ����շ���ͬ�ӵ�Ҏ(gu��)�t����(j��)���յĔ�(sh��)��(j��)�a(ch��n)��ѭ�h(hu��n)����a�����ͽ��յ���ѭ�h(hu��n)����a�M(j��n)�бر��^��У�(y��n)��(sh��)��(j��)�����Ƿ����_�� 6 ϵ�y(t��ng)�{(di��o)ԇ6.1 ���w�{(di��o)ԇ��������(g��)�{(di��o)ԇ��ʹ�õĜy(c��)ԇ�x���x�����ߣ� - �C(j��)һ�_(t��i)��
- ʾ������
- �f(w��n)��
- ֱ����(w��n)���Դ��
- ��Ƭ�C(j��)�_�l(f��)ϵ�y(t��ng)һ�ף�
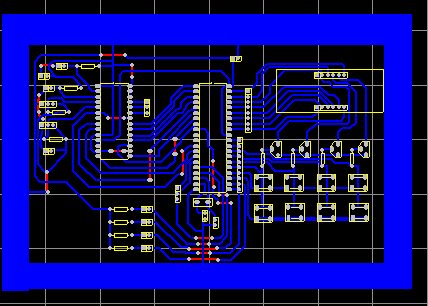
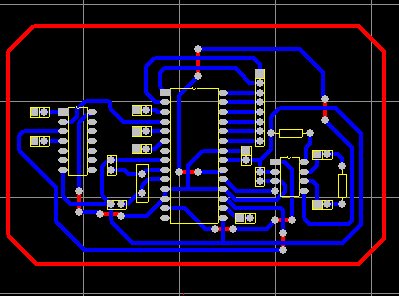
��ϵ�y(t��ng)���{(di��o)ԇ��Ҫ�֞�Ӳ���{(di��o)ԇ��ܛ���{(di��o)ԇ��(li��n)�C(j��)�{(di��o)ԇ���֡� ��(j��ng)�^(gu��)�����ķ����O(sh��)Ӌ(j��)��������Ӳ���·��ͬ�r(sh��)��ܛ���{(di��o)ԇҲ�ڴ����M(j��n)�С��@�������چ�(w��n)�}�ķ����ͽ�Q������(hu��)��Ɇ�(w��n)�}�ķe�ۣ����Ҳ���(hu��)��?y��n)�һ��(g��)С��(w��n)�}����Ҫ�z�����w�·���Ķ����Թ�(ji��)�s�������{(di��o)ԇ�r(sh��)�g��ܛ�������У�����������ɵ��dž�Ԫ����ģ�K���{(di��o)ԇ��Ȼ���M(j��n)��ϵ�y(t��ng)�{(di��o)ԇ�����w���cӲ���{(di��o)ԇ�ķ�����ࡣ(li��n)�C(j��)�{(di��o)ԇ������Ҫ��һ���֣�ͬ�r(sh��)Ҳ�DZ��b�óɹ����P(gu��n)�I�����S����(w��n)�}�����^���֡� 6.2 Ӳ����Ԫ�·�{(di��o)ԇ6.2.1��Сϵ�y(t��ng)���{(di��o)ԇ���șz�y(c��)���������·���Ƿ���̓������·�ȬF(xi��n)��Ȼ�����+5V�Դ���z�y(c��)����(g��)оƬ���Դ�Ƿ��+5V�������+5V��Ԓ���f(shu��)��������_������늉�������Ƭ�C(j��)�Ƿ�l(f��)�ᣬ�粻�l(f��)���f(shu��)���Դ�B�����_���y(c��)��Ƭ�C(j��)30�_��ALE���Ƿ����}�_����ݔ����������f(shu��)����Ƭ�C(j��)���������� 6.2.2A/D�D(zhu��n)�Q�·�{(di��o)ԇ�Ȍ�(du��)A/D�M(j��n)�о����{(di��o)ԇ��ͨ�^(gu��)������^�m(x��)�������ģ�K���{(di��o)ԇ���@һ�����P(gu��n)�I��Ҳ�����y�{(di��o)ԇ��һ���� �oAT89C51����A/D�D(zhu��n)�Q�������{(di��o)ԇA/D�D(zhu��n)�Q�·��A/D�D(zhu��n)�Q�·�{(di��o)ԇ���E���£� 1�����o��·ģ�M늉�ݔ����̖(h��o)��һ·��(sh��)��늉�ݔ����̖(h��o)�քeݔ������(y��ng)��ֱ��늉������f(w��n)�ñ�z�y(c��)늉��Ƿ�ɼ��^(gu��)��(l��i)��Ҳ����ݔ���늉��c�Դ���o늉��Ƿ�һ�¡� 2���z�y(c��)ADC0809�Ć���(d��ng)��̖(h��o)��ݔ��ʹ����̖(h��o)ݔ���Ƿ����_�� 3���y(c��)��ݔ���늉��c�Դ���o늉�һ�º��ٙz�y(c��)ADC0809��ͨ���x���Ƿ����_���磺�oIN5ݔ��0~5V��늉���ADC0809��ͨ���x��ˣ����addrc=5V,addrb=0V,addra=5V, Ҳ����addrc=1,addrb=0,addra=1;��ʾԓͨ���x�����_����t�����_����������_���z������Ƿ����_���������]�І�(w��n)�}���ٙz���·�Ƿ�ӌ�(du��)�ˡ� 4���y(c��)��ͨ���x�����_���ٜy(c��)����(sh��)����ݔ����Ҳ��ADC0809��D0~D7ݔ���˵Ĕ�(sh��)�����Ƿ��cݔ��ģ�M������(du��)��(y��ng)����׃ģ�M늉���ݔ�룬����(sh��)����̖(h��o)׃���Ƿ��ģ�M��׃����(du��)��(y��ng)�����ݔ����(sh��)�����cݔ��ģ�M������(du��)��(y��ng)�f(shu��)��A/D�D(zhu��n)�Q���_�� 6.2.3���(b��o)���·�{(di��o)ԇ�����șz��l(f��)����O�ܵ���ؓ(f��)�O�Л]�н��e(cu��)���l(f��)����O����ȱ�ڵ���ؓ(f��)�O����(d��ng)���F(xi��n)���ƽ�r(sh��)���l(f��)����O������ ��(d��ng)���յ����������z�y(c��)����̖(h��o)�Ю��ӕr(sh��)��������(y��ng)�İl(f��)����O���Ƿ��������磬��(d��ng)�ضȂ��������z�y(c��)���Ĝضȸ������O(sh��)������ߜضȕr(sh��)������(du��)��(y��ng)�İl(f��)����O�ܾͰl(f��)���� 6.2.4�I�P�@ʾ�·�{(di��o)ԇ���{(di��o)ԇǰ��ֵ���ᵽ�������O�ܵĎׂ�(g��)�O���Д�͔�(sh��)�a�ܵ�a��g����(du��)��(y��ng)�Ĺ��_�Ĝy(c��)ԇ���@��ʮ����Ҫ�ģ��@ֱ���P(gu��n)ϵ���˲��ֵijɔ���1���Д���O������ͣ�PNP��NPN�������ڻ��O�c�l(f��)��O�����O�c��늘O���քe�ǃ���PN�Y(ji��)������֮�g�ķ������ֵ����С���������f(w��n)�ñ�Wķ�n��R��100��R��1K���y(c��)���r(sh��)���Ȍ���һ���ڹP�ӵ�ijһ��(g��)�J(r��n)���Ĺ��_�ϣ���һ���P�Ⱥ�ӵ������ɂ�(g��)���_�ϡ�����y(c��)���õ�����ֵ���ܴ�С����Ȼ��(du��)�Q���P���؏�(f��)�����y(c��)���r(sh��)����ֵǡ���c�����෴������С���ܴ��t�ɔඨ���J(r��n)���Ĺ��_����O���������������Y(ji��)������(y��ng)��?y��)Qһ��(g��)�J(r��n)�����_���y(c��)����ֱ�����������Y(ji��)����ֹ���y(c��)���r(sh��)ע����_�ͱ��P�ĘO�ԡ���(d��ng)�ڹP���ڻ��O���t���P�քe���������ɘO�r(sh��)���y(c��)�õ����ֵ���^С���t���ж�ԓ���O�ܞ�NPN�ͣ���֮����PNP�͡�2���Д༯늘O�Ͱl(f��)��O���Д༯늘O�Ͱl(f��)��O�Ļ���ԭ���ǰ����O�ܽӳɻ����ιܷŴ��·�����Üy(c��)�����ӵ�����Ŵ�ϵ��(sh��)�µĴ�С��(l��i)�Д༯늘O�Ͱl(f��)��O����(du��)�ڳ��õ�NPN��С���ʹ�ܡ�����늘O���Դ���O���l(f��)��O���Դؓ(f��)�O���@�r(sh��)���ƫ�^�����늉��O�Է��ӣ��t���ƫ�D(zhu��n)�ͱ��^С���ɴ˼����Д����늘O�Ͱl(f��)��O����һ�N���ɿ����k���ǣ���(d��ng)�϶����y(c��)��NPN��ܺ��ڱ��P����һ��(g��)���y(c��)�Ĺ��_���t���P����һ��(g��)���_�����O�ҿգ��^����ƫ�D(zhu��n)��r��Ȼ�ڱ��P���ӹ��_�c�єඨ�Ļ��O������ס��ע�ⲻ��ʹ���������@�r(sh��)�����w����ஔ(d��ng)�����Rb�����^�y(c��)��������ֵ׃����Ȼ����Q�ڡ��t���P�����^����ֵ׃������ǰ�ߵ�׃�����^�tǰ�ߺڱ��P���ӹ��_���Ǽ�늘O���t���P���ӹ��_��l(f��)��O�����PNP�����c������r�෴������(j��)����ķ������y(c��)����ʹ�õ����O����PNP�ܣ�����_ƽ�挦(du��)���Լ������_�����Ҟ�e��b��c����(sh��)�a���_�Ĝy(c��)ԇ���@�ñ��^��(ji��n)�Σ�����ǹ�ꎘO�Ĕ�(sh��)�a�ܾ�λ�x�ӵأ�Ȼ���c(di��n)�������Ĺ��_��ͨ�^(gu��)�@ʾ�Y(ji��)����(l��i)�ඨ���_��a��b��c�ȣ�λ�xҲ�����f(w��n)�ñ��ĺڱ��Pȥ̽ԇ�ġ�����ǹ��(y��ng)�O��Ԓ���üt���P��(l��i)̽ԇλ�x���������c��ꎘO��һ�¡���(j��ng)�^(gu��)���ϵ��Д࣬�õ����_�Ĺ��_�����·�С� ���w�{(di��o)ԇ���E�飺 ��1���I�P�Ƿ������� ��2����(d��ng)�����I�P�r(sh��)����(sh��)�a���@ʾ�Ĕ�(sh��)���Ƿ��cܛ���O(sh��)Ӌ(j��)��һ�ӡ� 6.2.5�������·�{(di��o)ԇ���M(j��n)�Ђ������{(di��o)ԇ�r(sh��)�����șz�����(g��)�������ĽӾ��·�Ƿ����_���e��������(g��)�_�Ă��������������ӵ�ADC0809�r(sh��)��Ҫ��ؓ(f��)�d��裬ؓ(f��)�d������ֵ��С�Ђ���������Q���� ��(d��ng)�Ă�(g��)���������յ����N������̖(h��o)�r(sh��)���磬�ض��^(gu��)�ߕr(sh��)���ضȂ������ͽ��յ���̖(h��o)�ˣ�ͨ�^(gu��)ADC0809���ض��D(zhu��n)�Q��늉����͆�Ƭ�C(j��)���c�O(sh��)���Ĝض��M(j��n)�б��^�������O(sh��)���ضȕr(sh��)���o�l(f��)����O��һ��(g��)���ƽ���l(f��)����O�ܾ������@ʾ��(b��o)���� �������������{(di��o)ԇҲ����ˡ���(d��ng)�Ă�(g��)���������ܽ��ծ�����̖(h��o)�r(sh��)���f(shu��)���������·�����_�ģ��{(di��o)ԇ�Ժ�͛]��(w��n)�}�ˡ� 6.3 ܛ�������{(di��o)ԇ6.3.1ܛ��ϵ�y(t��ng)�O(sh��)����(du��)�ڱ�ϵ�y(t��ng)���ԣ�ܛ����������(sh��)�F(xi��n)�Ĺ��ܱ��^�٣�������{(di��o)ԇ�@�ñ��^��(ji��n)�Ρ�����(g��)����ʹ�õ��DžR���Z(y��)�ԣ���keil c51�¾����{(di��o)ԇ��ɵġ�Keil C51������(gu��)Keil Software��˾��Ʒ��51ϵ�м��݆�Ƭ�C(j��)��ܛ���_�l(f��)ϵ�y(t��ng)������uVision�cIshell�քe��C51 for Windows��for Dos�ļ����_�l(f��)�h(hu��n)��(IDE)��������ɾ������g���B�ӡ��{(di��o)ԇ�����������(g��)�_�l(f��)���̡��_�l(f��)�ˆT����IDE����������������C��R��Դ�ļ���Ȼ��քe��C51��A51���g�����g����Ŀ��(bi��o)�ļ�(.OBJ)��Ŀ��(bi��o)�ļ�����LIB51��(chu��ng)�����Ɏ�(k��)�ļ���Ҳ�����c��(k��)�ļ�һ��(j��ng)L51�B�Ӷ�λ���ɽ^��(du��)Ŀ��(bi��o)�ļ�(.ABS)��ABS�ļ���OH51�D(zhu��n)�Q�ɘ�(bi��o)��(zh��n)��Hex�ļ����Թ��{(di��o)ԇ��dScope51��tScope51ʹ���M(j��n)��Դ���a��(j��)�{(di��o)ԇ��Ҳ���ɷ�����ʹ��ֱ�ӌ�(du��)Ŀ��(bi��o)���M(j��n)���{(di��o)ԇ��Ҳ����ֱ�ӌ��������A����EPROM�С� ����Ҫͨ�^(gu��)������������оƬ��������^(gu��)�̞飺�ٶ�Ҫ������ļ��ǡ�test.hex�������ȣ��B�Ӿ��������嵽Ӌ(j��)��C(j��)���ڡ�Ȼ���B���Դ��������ָʾ��������89C51����ZIF�������i�o�ֱ���(Ո(q��ng)ע��оƬ�IJ��뷽��ȱ�����ϣ������ַ��� ��t��(hu��)�p��оƬ)Ȼ��(d��ng)ܛ�������(bi��o)�Γ�����߅�ġ�оƬ���������x���оƬ��ͣ��@���x��89C51�����ڡ��ļ����ˆ��x���_Hex�ļ������ҵ���test.hex���ļ����Γ������_�����������@ʾ�ļ���(n��i)�ݣ����½��@ʾУ�(y��n)�͡��Γ�����оƬ�����o���������ğ���ָʾ�����������ꮅ���(b��o)��Y(ji��)��������֮ǰ��(hu��)�Ԅ�(d��ng)����оƬ��(n��i)�ݣ������ꮅ��(hu��)�Ԅ�(d��ng)У�(y��n)���������Ҫ���ܣ������x����ܼ�(j��)�e�����˞�ֹ����(g��)ܛ�������{(di��o)ԇ�h(hu��n)�����ѽ�(j��ng)����ˡ� 6.3.2��Ƭ�C(j��)ϵ�y(t��ng)ܛ���{(di��o)ԇ�mȻ��ǰ���Ӳ���·�{(di��o)ԇ�^(gu��)����ÿ��(g��)ģ�K���{(di��o)ԇ�ѽ�(j��ng)�����˲���ģ�K��ܛ���{(di��o)ԇ���������w��Ƭ�C(j��)ϵ�y(t��ng)���{(di��o)ԇ߀����һ�������y�ġ����磬�ڌ�(du��)A/D�D(zhu��n)�Q�·��Ӳ���M(j��n)�Мy(c��)ԇ�r(sh��)���Ƿքe��(du��)��ͨ���ɘӜy(c��)ԇ�������wϵ�y(t��ng)Ҫ����Ƿ֕r(sh��)�@ʾ����(g��)����(sh��)�Լ������������ޡ���?y��n)�Ҫ�@ʾ�Ĕ�(sh��)��(j��)���^�࣬���Ա��^�韩�����_ʼ�r(sh��)���ھ��̕r(sh��)�]���O(sh��)�úø�ͨ���@ʾ�Ę�(bi��o)־λ����(sh��)�F(xi��n)���˔�(sh��)�a�ܷ֕r(sh��)�@ʾ�Ĺ��ܡ����Ǐ��������_ʼ�z�飬�l(f��)�F(xi��n)A/D�D(zhu��n)�Q�ӳ������õĘ�(bi��o)־λ�c������?q��)��ӳ����{(di��o)�õĘ�(bi��o)־λ��һ�¡� 6.3.3CAN����ܛ���{(di��o)ԇ ���{(di��o)ԇCAN�����ij���r(sh��)�����_ʼ����keil c51���M(j��n)���{(di��o)ԇ�����g����ͬ���^(gu��)�����(l��i)������һЩ�������CAN�����İl(f��)�ͳ���ͽ��ճ�����_�^�����ϳ�ʼ�������@�ӳ���͛]���e(cu��)�ˡ� 6.4 �{(di��o)ԇ�^(gu��)���аl(f��)�F(xi��n)�Ć�(w��n)�}����Q������1��Ӳ���·��Ԕ��(x��)�z�y(c��)��(w��n)�}��Ӳ���·�����_�Ӿ�������(g��)ϵ�y(t��ng)�܉������������ǰ�ᡣ���{(di��o)ԇǰ��һ��ҪԔ��(x��)�z���·�ĺ��ӺͽӾ����Ž^̓������·�͔�·�ȬF(xi��n)��ʹӲ���{(di��o)ԇ�_(d��)���°빦����Ч���� �ڙz���^(gu��)���У������Ў��������^��(x��)�����P���^С���ں����^(gu��)���У������������|���ˣ������˶�·���ڰl(f��)�F(xi��n)��(w��n)�}�������º���һ�飬���z��o(w��)�`�� ��2���ӵ؆�(w��n)�}������ԭ�Ⱦ����ڛ]��̎���ýӵ؆�(w��n)�}����(y��n)��Ӱ����{(di��o)ԇ���M(j��n)�̡��؛]�нӺã�Ӱ��˔�(sh��)��(j��)�����_ݔ�����@ʾ�� ���еĵؾ�����(y��ng)ԓ����һ���@�ӾͲ���(hu��)����ɔ_�� ��3��ADC0809ͨ���x��(w��n)�}��ͨ���x�����_���Ͳ��ܰє�(sh��)��(j��)�ɼ��^(gu��)��(l��i)�����{(di��o)A/D�D(zhu��n)�Q���^(gu��)���У��_ʼ���ܰє�(sh��)��(j��)�ɼ��^(gu��)��(l��i)��ͨ�^(gu��)�z��l(f��)�F(xi��n)ͨ���x��(du��)��(y��ng)�������ij�����ͨ���x���(bi��o)ӛ��ʹ��(sh��)��(j��)���Բɼ��^(gu��)��(l��i)�� ��4���ӕr(sh��)��(w��n)�}����ϵ�y(t��ng)���˴���ͨ�ŵķ������12M�ľ����ӕr(sh��)Ҫ����6M�ľ���r(sh��)Ҫ�L(zh��ng)������ӕr(sh��)�����п���ʹ��ϵ�y(t��ng)�@ʾ����(w��n)���� ��5���I�P�@ʾ����(w��n)�}���ڵ�һ�ΰѳ�����뵽оƬ�r(sh��)������5V�Դ�l(f��)�F(xi��n)ʲô���]�У��z��Ӳ���·�����Ă�(g��)���O�ܵ�E�O�]�н����Դ�����Ă�(g��)���O�ܵ�E�O����5V�Դ��(sh��)�a�����@ʾ�����Dz���ԭ���O(sh��)Ӌ(j��)���ǘӡ����(l��i)�����ߙz��ܛ��������һЩ������@ʾ���_�ˡ� ��6��CAN����ͨ�ņ�(w��n)�}��CAN������SJA1000��RESET�_�ǵ��ƽ�ģ�AT89C51��RESET�Ǹ��ƽ����ˣ����B�ӕr(sh��)Ҫ��һ��(g��)���T���������O(sh��)Ӌ(j��)�·�ĕr(sh��)�������@һ�c(di��n)������ȥ�Ժ����_�ˡ� 6.5 (li��n)�C(j��)�{(di��o)ԇ��λ�C(j��)�{(di��o)ԇ��ɺ��M(j��n)��(li��n)�C(j��)�{(di��o)ԇ�� (li��n)�C(j��)�{(di��o)ԇ����Ҫ���O(sh��)�䣺 ֱ����(w��n)���Դ���_(t��i)�� �ΙC(j��)�ɼ��� �ž����ɣ� (li��n)�C(j��)�{(di��o)ԇ�DZ�ϵ�y(t��ng)���^�P(gu��n)�I�IJ��֡�������(g��)(li��n)�C(j��)�{(di��o)ԇ�^(gu��)����Ҳ�����˲��ن�(w��n)�}�����磬�]ע�⌢�����c��λ�C(j��)�Ľ��ճ�����(li��n)ϵ����(d��o)��(sh��)��(j��)����ͨ�^(gu��)CAN�������o��λ�C(j��)�� ���M(j��n)��(li��n)�C(j��)�{(di��o)ԇ�r(sh��)�������еij���Y(ji��)������(l��i)������оƬ�ϡ����M(j��n)�о��g�r(sh��)����һЩ������ƥ�䣬���߾���������һЩ�����@�Ӿ��g��ͨ�^(gu��)�ˡ��ڱ�ϵ�y(t��ng)�У��������O(sh��)Ӌ(j��)���I�P�Á�(l��i)�@ʾС�^(q��)ס�����T�Ʒ��g̖(h��o)���چΪ�(d��)�{(di��o)ԇ�I�P�r(sh��)���I�P�@ʾ���������ǣ�(li��n)�C(j��)�{(di��o)ԇ�r(sh��)���l(f��)�F(xi��n)�I�P�@ʾ���������_��Ӳ���·�]��(w��n)�}�r(sh��)�����߾Ϳ����l(f��)�F(xi��n)�I�P�ij�����惦(ch��)����ADC0809�Ĵ惦(ch��)������ͬһ��(g��)���l(f��)�F(xi��n)��(w��n)�}�����߾������O(sh��)��һ��(g��)׃�����Á�(l��i)�惦(ch��)�I�P��׃�������¾��g����оƬ���늺��@ʾ�����ˡ� 7 ϵ�y(t��ng)ʹ���f(shu��)����ϵ�y(t��ng)ʹ������(l��i)�dz����㣬�������߾�ϵ�y(t��ng)��ʹ�÷�����һ��(g��)��(ji��n)�εĽ�B������ С�^(q��)��ʹ���Ñ���(g��)�����������Լҵĺ��mλ�ã����磬��ú���(b��o)�����������ڏN �������ضȂ������͟��F���������ڿ͏d�����t������������T�ڡ�Ȼ������Դ���ܹ����ˡ� ��(d��ng)�Ј�(b��o)���r(sh��)��С�^(q��)�������ĵĈ�(b��o)�����͕�(hu��)�������箔(d��ng)�ضȂ������z�y(c��)���҃�(n��i)�ض��^(gu��)�ߕr(sh��)���͕�(hu��)���@��(g��)������̖(h��o)��ADC0809�ɼ����͆�Ƭ�C(j��)̎�����˕r(sh��)���c�ضȂ���������(du��)��(y��ng)�İl(f��)����O�ܾ͕�(hu��)����������rҲ����ˡ� ��(d��ng)�Ј�(b��o)����̖(h��o)�r(sh��)��С�^(q��)��ס���������b�ڼ���İ��I�������Լ�����ķ��g̖(h��o)���@�ӣ����g̖(h��o)�͕�(hu��)�@ʾ��С�^(q��)�������ģ�С�^(q��)�������ľͿ���֪���l(f��)���ľ��w��r�;��w���g̖(h��o)�� ���b��ʹ������(l��i)��(ji��n)���W(xu��)�����ҹ��ܱ��^��(qi��ng)�� 8 �Y(ji��)Փ�����O(sh��)Ӌ(j��)�͌�(sh��)�F(xi��n)��һ�N���چ�Ƭ�C(j��)AT89C51��С�^(q��)������(b��o)��ϵ�y(t��ng)��ԓϵ�y(t��ng)��Ҫ�Է��㡢���r(ji��)���ɿ��͌�(sh��)�õȞ�Ŀ�ģ���Ҫ��С�^(q��)����(g��)ס������Ҫ��(du��)������ADC0809��(sh��)��(j��)�ɼ�������AT89C51�����������ͨ�^(gu��)��(ji��n)���I�P�O(sh��)�È�(b��o)�����ޣ����(y��ng)�O��λ��(sh��)�a�@ʾ���ɶ��O�ܰl(f��)���M(j��n)�Ј�(b��o)����ͬ�r(sh��)����ϵ�y(t��ng)�c����һ��(g��)ͬ�W(xu��)��С�^(q��)�W(w��ng)վ�M�ϳ�һ��(g��)������ϵ�y(t��ng)������С�^(q��)�W(w��ng)վ�ό�(sh��)�F(xi��n)������(sh��)�r(sh��)�O(ji��n)�ء� ���ĵ����c(di��n)��ADC0809����·ģ�M늉��ɼ��Լ���Ƭ�C(j��)�I�P�@ʾ��Сϵ�y(t��ng)���ڌ�(sh��)�H�Č�(sh��)�F(xi��n)�^(gu��)���У���ѭ�����y����Ӳ����ܛ�����^(gu��)�̡����������O(sh��)Ӌ(j��)�΄�(w��)�Լ�ϵ�y(t��ng)Ҫ��(sh��)�F(xi��n)�Ĺ��ܣ���ᘌ�(du��)�Եز�����P(gu��n)���Y�ϣ���Ϥ����оƬ�Լ�Ԫ�����Ĺ���ԭ�����������O(sh��)Ӌ(j��)Ӳ���·������(j��)Ӳ���·���O(sh��)Ӌ(j��)���c(di��n)���в��E�،�(du��)Ӳ���·�M(j��n)�з�ģ�K�{(di��o)ԇ�� ��ϵ�y(t��ng)���Ă�(g��)��������(l��i)�O(ji��n)�y(c��)��ͥ������r�����Ю�����r�l(f��)���r(sh��)���������͌��z�y(c��)������̖(h��o)��(j��ng)�^(gu��)ADC0809�ɼ����͵�AT89C51�M(j��n)��̎����ͬ�r(sh��)����(b��o)���������@ʾ��(b��o)�����ڴ�ϵ�y(t��ng)�У��I�P�Á�(l��i)�O(sh��)��С�^(q��)��ͥ��(b��o)�����T�Ʒ��g̖(h��o)����(sh��)�a���Á�(l��i)�@ʾ�� ���ڱ��˵�֪�R(sh��)���������ޣ���(du��)���е�ijЩ��(w��n)�}���猦(du��)��ϵ�y(t��ng)��(du��)�v�ı����Եȣ�δ���M(j��n)����������о�����ϵ�y(t��ng)Ҳֻ�_(d��)����һ���ֵČ�(sh��)�HЧ���� ���ж����S���֮̎����Ո(q��ng)��λ�ώ����x�߲����n�̡� �x �o�]���g�������ţ���������ČW(xu��)��(x��)������g��ʧ��Ҳ���ի@�����D��Ҳ�п옷(l��)������ãҲ�з����ڹ�����ӿƼ���W(xu��)�@�����á���F������W(xu��)��(x��)�����У�����һ��(g��)��(d��ng)���ٲ����µĺ��ӳ��L(zh��ng)��һ��(g��)��(du��)���(hu��)����(du��)������M���ŵ����ꡣ���@����Ҫ���x���кܶࡣ ���ĵظ��x��λ�ώ������(l��i)�Ă������ژI(y��)�ͽ�o��������һ�P�����ؔ(c��i)���� ���ή��I(y��)�O(sh��)Ӌ(j��)���Ǵ�W(xu��)���ĽY(ji��)�����һ�ýY(ji��)�I(y��)�n�����������ώ�����ָ��(d��o)�ώ�������(g��)�����I(y��)�O(sh��)Ӌ(j��)�A�Σ�����ƽ�r(sh��)����Փ���ٌ�(sh��)�`�ČW(xu��)��(x��)����(d��o)�������I(y��)�O(sh��)Ӌ(j��)�^(gu��)���У����������@���ǘӵĆ�(w��n)�}����(d��ng)Ȼ�����Լ����������Y�Ͻ�Q��(w��n)�}�⣬Ҳ�����������ώ������ώ��ڎ����W(xu��)����Q��(w��n)�}���^(gu��)���У��B(t��i)���H�ͣ�����ѭѭ���T����ʾȥ���l(f��)�W(xu��)���Լ�˼�����ώ�����֮���~������֮�ڝO�����������ČW(xu��)���w��(hu��)�����һֱ�Ĵ�м��� ���x���I(y��)�O(sh��)Ӌ(j��)�^(gu��)�������нo�����\(ch��ng)�������ώ���ͬ�W(xu��)���� �����x�ҵ�ĸУ������ӿƼ���W(xu��)���o���ṩ�W(xu��)��(x��)������Ŀ��g�����ĵ�ϣ����������������ã� �����īI(xi��n)[1] �����A ����Ⱥ ����Դ ��ӭ������.��Ӌ(j��)��C(j��)ԭ���c�ӿڼ��g(sh��)[M].�������ߵȽ��������磬2002. [2] ����֮����.Visual Basic�cRS-232����ͨ�ſ���[M].�������Ї�(gu��)���������, 2002. [3] ��˼������.Protel�·�O(sh��)Ӌ(j��)�̳�[M].���������A�����磬2002. [4] �ຣ���Ⱦ���.��Ӌ(j��)��C(j��)���Ƽ��g(sh��)[M].���������A��W(xu��)�����磬2003. [5] ���_(d��)����.��Ƭ�C(j��)��(y��ng)��ϵ�y(t��ng)�_�l(f��)��(sh��)����(d��o)��[M].�����������]늳�����, 2003. [6] �x��������.��Ӿ�·�O(sh��)Ӌ(j��).��(sh��)�(y��n).�y(c��)ԇ[M].��h���A�пƼ���W(xu��)�����磬2000. [7] �Z��� ��美��.MCS-51ϵ�І�Ƭ�C(j��)ԭ���c��(y��ng)�ã�C�Z(y��)�棩[M].������ �����C(j��)е���I(y��)�����磬2002. [8] ��ྎ��.PC�C(j��)����Ƭ�C(j��)��(sh��)��(j��)ͨ�ż��g(sh��)[M].�������������պ����W(xu��)������, 2000. [9] ��?ji��n)��?qi��ng)�Ⱦ���.ͻ��Delphi 7.0 ���̰���[M].�������Ї�(gu��)ˮ��ˮ늳����� ��2003. [10] ʯ�|������.��Ƭ�C(j��)��(y��ng)��ϵ�y(t��ng)�O(sh��)Ӌ(j��)�����T����ͨ[M].������������ӿƼ���W(xu��)������, 2002. [11] ���A ����܊����.Delphi����ͨ�Ź����_�l(f��)��(sh��)����(d��o)��[M].�����������] 늳����磬2004. [12] ��W(xu��)������.EM78��Ƭ�C(j��)��(sh��)�ý̡̳����A(ch��)ƪ[M].��������ӹ��I(y��)�����磬2003. [13] M . Herry. Analog Integrate Circuits WILEY.2001. �� ����һ ϵ�y(t��ng)ԭ��D ��䛶� ϵ�y(t��ng)PCB�D | 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664









 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��