Altium Designer畫的L298N電機驅動器電路原理圖和PCB圖如下:(51hei附件中可下載工程文件)


pcb工程文件包:

制作出來的實物圖如下:

接線說明資料:



附件中包含如下單片機控制例程:
例一、步進電機正轉兩相四拍程序
例七、四相步進電機正轉四拍程序
例三、步進電機反轉兩相四拍程序
例九、四相步進電機反轉四拍程序
例二、步進電機正轉兩相八拍程序
例五、步進電機兩相四拍調速程序
例八、四相步進電機正轉八拍程序
例六、步進電機兩相八拍調速程序
例十、四相步進電機反轉八拍程序
例十一、四相步進電機四拍調速程序
例十七、步進電機每按一下轉3圈
例十三、四相步進電機八拍調速程序方法二
例十二、四相步進電機八拍調速程序
例十五、步進電機每按一下轉1.8度
例十六、步進電機每按一下轉3.6度
例十四、步進電機分檔控制
例四、步進電機反轉兩相八拍程序
直流電機反轉控制程序
直流電機外接位置開關調速正反轉控制程序
直流電機實現定時正反轉
直流電機正轉控制程序
直流電機調速控制實例
直流電機調速控制程序
這是其中的一個例程:
步進電機兩相八拍調速單片機源程序如下:
- ////////////////////////匯誠科技////////////////////
- ///////////////////步進電機調試程序/////////////
- #include<reg52.h>
- /*****P1.0=A ;P1.1=B ;P1.2=B' ; P1.3=A'****/
- //////////////////////////////////////////////////////////////////////////////////////////////
- /*******************************正轉數組**************************************************/
- code unsigned char runz[8]={0x0e,0x0c,0x0d,0x09,0x0b,0x03,0x07,0x06}; //兩相四線八拍工作方式
- /*******************************反轉數組**************************************************/
- code unsigned char runf[8]={0x06,0x07,0x03,0x0b,0x09,0x0d,0x0c,0x0e}; //兩相四線八拍工作方式
- unsigned char keycan=0; //鍵值
- unsigned char s,i,j,k,z;
- int y=30;//定義轉動速度,數值越大電機轉速越慢反之則快
- sbit P2_0=P2^0;//正轉按鍵
- sbit P2_1=P2^1;//反轉按鍵
- sbit P2_2=P2^2;//電機加速
- sbit P2_3=P2^3;//電機減速
- void delay(i)//延時函數
- {
- for(j=0;j<i;j++)
- for(k=0;k<250;k++);
- }
- void zrun()// 正轉運行
- {
- for(z=0;z<8;z++)
- {
- P1=runz[z];
- delay(y);
- }
- }
- void frun()// 反轉運行
- {
- for(z=0;z<8;z++)
- {
- P1=runf[z];
- delay(y);
- }
- }
- main()
- {
- while(1)
- {
- if(P2_0==0) //如果電機正轉按鍵按下
- {
- keycan=1; //鍵值等于1
- }
- if(P2_1==0) //如果電機反轉按鍵按下
- {
- keycan=2; //鍵值等于2
- }
- switch (keycan)
- {
- case 1: zrun(); //鍵值等于1 正轉
- break;
- case 2: frun(); //鍵值等于2 反轉
- break;
- }
- if(P2_2==0) // 電機加速
- {
- y+=5;
- }
- if(P2_3==0)
- { // 電機減速
- y-=5;
- }
- }
- }
L298N電機驅動器使用說明書 注意:本說明書中添加超鏈接的按CTRL并點擊連接,即可看到內容。

L298N是ST公司生產的一種高電壓、大電流電機驅動芯片。該芯片采用15腳封裝。主要特點是:工作電壓高,最高工作電壓可達46V;輸出電流大,瞬間峰值電流可達3A,持續工作電流為2A;額定功率25W。內含兩個H橋的高電壓大電流全橋式驅動器,可以用來驅動直流電動機和步進電動機、繼電器線圈等感性負載;采用標準邏輯電平信號控制;具有兩個使能控制端,在不受輸入信號影響的情況下允許或禁止器件工作有一個邏輯電源輸入端,使內部邏輯電路部分在低電壓下工作;可以外接檢測電阻,將變化量反饋給控制電路。使用L298N芯片驅動電機,該芯片可以驅動一臺兩相步進電機或四相步進電機,也可以驅動兩臺直流電機。 |
簡要說明: - 尺寸:80mmX45mm
- 主要芯片:L298N、光電耦合器
- 工作電壓:控制信號直流5V;電機電壓直流3V~46V(建議使用36伏以下)
- 最大工作電流:2.5A
- 額定功率:25W
特點:1、具有信號指示。 2、轉速可調 3、抗干擾能力強 4、具有過電壓和過電流保護 5、可單獨控制兩臺直流電機 6、可單獨控制一臺步進電機 7、PWM脈寬平滑調速 8、可實現正反轉 9、采用光電隔離 六、有詳細使用說明書 七、提供相關軟件
八、提供例程及其學習資料 | | 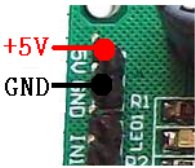
1.信號電源引入端
| 
2.控制信號輸入端
| 
3.直流電機調速PWM脈寬信號輸入端。(控制步進電機或者控制直流電機無需調速時,保持此狀態)
| 
4.控制信號指示燈
|  5.光電隔離(抗干擾) 5.光電隔離(抗干擾)
| 
6.核心芯片(L298N)
| 
7.二極管橋式續流保護
| 
8.電源濾波
| 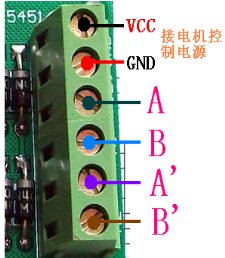
9.端子接線
|
實例一:步進電機的控制實例 步進電機是數字控制電機,它將脈沖信號轉變成角位移,即給一個脈沖信號,步進電機就轉動一個角度,因此非常適合于單片機控制。步進電機可分為反應式步進電機(簡稱VR)、永磁式步進電機(簡稱PM)和混合式步進電機(簡稱HB)。 一、步進電機最大特點是: 1、它是通過輸入脈沖信號來進行控制的。 2、電機的總轉動角度由輸入脈沖數決定。 3、電機的轉速由脈沖信號頻率決定。 二、步進電機的驅動電路 根據控制信號工作,控制信號由單片機產生。(或者其他信號源) 如圖:按CTRL并點擊(L298N驅動器與直流電機接線圖) 三、基本原理作用如下: 兩相四拍工作模式時序圖: (1)控制換相順序 1、通電換相這一過程稱為脈沖分配。 例如: 1、兩相四線步進電機的四拍工作方式,其各相通電順序為(A-B-A’-B’)依次循環。《例一、步進電機正轉兩相四拍程序》(通電控制脈沖必須嚴格按照這一順序分別控制A,B相的通斷。) 2、兩相四線步進電機的四拍工作方式,其各相通電順序為: (A-AB-B-BA’-A’-A’B’-B’-B’A) 例二、步進電機正轉兩相八拍程序》依次循環。(出于對力矩、平穩、噪音及減少角度等方面考慮。往往采用八拍工作方式) (2)控制步進電機的轉向 如果給定工作方式正序換相通電,步進電機正轉,如果按反序通電換相,則電機就反轉。如:正轉通電順序是:(A-B-A’-B’ 依次循環。)則反轉的通電順序是:(B‘-A’-B-A依次循環。) 參考下例: 《例三、步進電機反轉兩相四拍程序》
《例四、步進電機反轉兩相八拍程序》 (3)控制步進電機的速度 如果給步進電機發一個控制脈沖,它就轉一步,再發一個脈沖,它會再轉一步。兩個脈沖的間隔越短,步進電機就轉得越快。調整單片機發出的脈沖頻率,就可以對步進電機進行調速。(注意:如果脈沖頻率的速度大于了電機的反應速度,那么步進電機將會出現失步現象)。 參考下例: 《例五、步進電機兩相四拍調速程序》
《例六、步進電機兩相八拍調速程序》 (4)四相電機的控制程序 如圖:按CTRL并點擊(驅動器控制四相步進電機接線圖) 《例 一 、步進電機正轉兩相四拍程序》 《例七、四相步進電機正轉四拍程序》
《例八、四相步進電機正轉八拍程序》
《例九、四相步進電機反轉四拍程序》
《例十、四相步進電機反轉八拍程序》
《例十一、四相步進電機四拍調速程序》 《例十二、四相步進電機八拍調速程序》 《例十三、四相步進電機八拍調速程序方法二》
以下為參考程序: 《例十四、步進電機分檔控制》 《例十五、步進電機每按一下轉1.8度》
《例十六、步進電機每按一下轉3.6度》
實例二:直流電機的控制實例 使用直流/步進兩用驅動器可以驅動兩臺直流電機。分別為M1和M2。引腳A,B可用于輸入PWM脈寬調制信號對電機進行調速控制。(如果無須調速可將兩引腳接5V,使電機工作在最高速狀態,既將短接帽短接)實現電機正反轉就更容易了,輸入信號端IN1接高電平輸入端IN2接低電平,電機M1正轉。(如果信號端IN1接低電平, IN2接高電平,電機M1反轉。)控制另一臺電機是同樣的方式,輸入信號端IN3接高電平,輸入端IN4接低電平,電機M2正轉。(反之則反轉),PWM信號端A控制M1調速,PWM信號端B控制M2調速。 可參考下圖表:

全部資料51hei下載地址:
 08K3856_L298N電機驅動器_共地.rar
(3.06 MB, 下載次數: 1429)
08K3856_L298N電機驅動器_共地.rar
(3.06 MB, 下載次數: 1429)
2018-3-28 11:49 上傳
點擊文件名下載附件
| 
 [復制鏈接]
[復制鏈接]




 ,能發郵箱嗎,
,能發郵箱嗎,

