|
|
ԓ�ļ��DZ����n���O(sh��)Ӌ(j��)ϣ����(du��)�������������
�y(c��)�ؼ��g(sh��)�c�x�����I(y��) �C���n���O(sh��)Ӌ(j��) ����ARM�ļ��ٶȺ̓A���z�y(c��)�b�õ��O(sh��)Ӌ(j��)
������W(xu��)�C(j��)е�c��(d��ng)�����̌W(xu��)Ժ ��0һ��������
2014��(j��)�y(c��)�ؼ��g(sh��)�c�x�����I(y��)�C���n���O(sh��)Ӌ(j��) ժҪ
�O(sh��)Ӌ(j��)�˻���STM32F103RCT6�ĸ߾��ȃAб�Ǻͼ��ٶșz�y(c��)ϵ�y(t��ng)��ϵ�y(t��ng)Ӳ�������Դ�·�����S��������MPU6050����2.8�� TFTҺ���@ʾ�����{(l��n)��ģ�K�Լ������o���·��ܛ���ϲ���MDK5�_�l(f��)�h(hu��n)����(du��)ARM���İ��M(j��n)�о��̡���λ�C(j��)�M(j��n)�Д�(sh��)��(j��)�@ʾ��ԓϵ�y(t��ng)���Ԍ�(du��)�������Aб�Ǽ����ٶ��M(j��n)�Йz�y(c��)��ͨ�^�֙C(j��)����MCU��������(sh��)��(j��)��ϵ�y(t��ng)�c��λ�C(j��)�M(j��n)����Ϣ�����������ȳ�ʼ�� MPU6050 �����O(sh��)��Ȼ������DMP�죬��ʼ�� MPU6050 ��ʹ��DMP���������ѭ�h(hu��n)���治ͣ�xȡ���ضȂ����������ٶȂ����������݃x�� DMP �ˑB(t��i)�����ĚW���ǵȔ�(sh��)��(j��)��ͨ�^�����ψ�(b��o)�o��λ�C(j��)���ضȲ��ψ�(b��o)����������λ�C(j��)ܛ�������Ԍ�(sh��)�r(sh��)�@ʾ MPU6050 �Ă�������B(t��i)��������(sh��)�r(sh��)�@ʾ 3D �ˑB(t��i)������ͨ�^ KEY0���I�_��/�P(gu��n)�]��(sh��)��(j��)�ς����ܡ�ͬ�r(sh��)���� LCDģ�K�����@ʾ�ضȺ͚W���ǵ���Ϣ��
2014��(j��)�y(c��)�ؼ��g(sh��)�c�x�����I(y��)�C���n���O(sh��)Ӌ(j��)
Ŀ �ժ Ҫ I 1 �O(sh��)Ӌ(j��)�΄�(w��)�� 1.1 �漰���I(y��)�n�� (1) 1.2 �O(sh��)Ӌ(j��)�΄�(w��) (1) 1.3 �O(sh��)Ӌ(j��)Ŀ��(bi��o) (1) 1.4 ���O(sh��)Ӌ(j��)����Ҫ���� (2) 1.5 ����С�Y(ji��) (2) 2 �O(sh��)Ӌ(j��)Փ�C��Ӌ(j��)�� 2.1 �n���O(sh��)Ӌ(j��)�������O(sh��)Ӌ(j��)���x (3) 2.2 �O(sh��)Ӌ(j��)����ܛ����Ҏ(gu��)�� (3) 2.3 ����С�Y(ji��) (4) 3 Ӳ��ϵ�y(t��ng)�O(sh��)Ӌ(j��) 3.1 ���w�����O(sh��)Ӌ(j��) (5) 3.2 Ԫ�������x�ͼ����� (5) 3.3 ϵ�y(t��ng)ģ�K���ܼ��ӿ��O(sh��)Ӌ(j��) (13) 3.4 ����С�Y(ji��) (15) 4 ܛ��ϵ�y(t��ng)�O(sh��)Ӌ(j��) 4.1 ܛ��ϵ�y(t��ng)���w�����O(sh��)Ӌ(j��) (16) 4.2 ܛ�������O(sh��)Ӌ(j��) (16) 4.3 ������a�O(sh��)Ӌ(j��)�c���� (17) 4.4 ����С�Y(ji��) (23) 5 �����d���c�{(di��o)ԇ 5.1 �{(di��o)ԇ�h(hu��n)���c���� (24) 5.2 �{(di��o)ԇ�^�̼��F(xi��n)����� (24) 6 ���Y(ji��)�cչ�� 6.1 �n���O(sh��)Ӌ(j��)���Y(ji��) (30) 6.2 ����չ�� (30) �� �A �O(sh��)Ӌ(j��)���� (31) �� � B �O(sh��)Ӌ(j��)�����Y�� (37)
2014��(j��)�y(c��)�ؼ��g(sh��)�c�x�����I(y��)�C���n���O(sh��)Ӌ(j��)
1 �O(sh��)Ӌ(j��)�΄�(w��)�����O(sh��)Ӌ(j��)��Ҫ�漰�Č��I(y��)�n����: 1����Ƭ�C(j��)ԭ������(y��ng)�� 2����̖(h��o)�����c̎�� 3��Ӌ(j��)��C(j��)���Ƽ��g(sh��) 4�����������g(sh��) 5����Ӿ�·CAD 6����(sh��)����Ӽ��g(sh��) 7����(f��)׃����(sh��)�c�e��׃�Q 1������MEMS�����·�z�y(c��)�Aб�ǶȰ�����MEMS���S���݃x�ăAб�Ǚz�y(c��)��(y��ng)�ã�֪�R(sh��)�c(di��n)����MEMS���݃x�ęz�y(c��)ԭ�����z�y(c��)�·������оƬ��̖(h��o)����ҊMEMS���݃x��(y��ng)�È�(ch��ng)�ϼ�ע�����(xi��ng)�� 2������MEMS�����·�z�y(c��)���ٶȰ�����MEMS���S���ٶ�Ӌ(j��)�ļ��ٶșz�y(c��)��(y��ng)�ã�֪�R(sh��)�c(di��n)����MEMS���ٶȵęz�y(c��)ԭ�����z�y(c��)�·������оƬ��̖(h��o)����ҊMEMS���ٶ�Ӌ(j��)��(y��ng)�È�(ch��ng)�ϼ�ע�����(xi��ng)�� ����(j��)�O(sh��)Ӌ(j��)�΄�(w��)���������Ŀ��(bi��o) - �˽����S������MPU6050����ԭ���Լ��乤����ʽ��
- �쾚�\(y��n)��ARM��Ɍ�(du��)�������IJ����c���ƣ�
- ��������(sh��)��(j��)ͨ�^����ͨ������λ�C(j��)��ģ�M�@ʾ��
- ϵ�y(t��ng)�c�֙C(j��)ͨ�^�{(l��n)���M(j��n)�Д�(sh��)��(j��)��ݔ��
- ���O(sh��)Ӌ(j��)����Ҫ����
ԓϵ�y(t��ng)��Ҫ������Ɍ�(du��)�Aб�Ǽ����ٶȵęz�y(c��)����(sh��)��(j��)ͨ�^�{(l��n)���ς����֙C(j��)���c��λ�C(j��)�M(j��n)����Ϣ��������λ�C(j��)�@ʾ���S������ٶȡ��@ʾ���S����A�ǡ���(sh��)�r(sh��)�@ʾMPU6050�Ă�������B(t��i)��������(sh��)��(j��)3Dģ�M�@ʾ�ȹ��ܡ� �Y(ji��)�����W(xu��)�n�̺��O(sh��)Ӌ(j��)�΄�(w��)���ƶ�������(y��ng)�Ĺ����΄�(w��)������Ҏ(gu��)���������E�� 2 �O(sh��)Ӌ(j��)Փ�C��Ӌ(j��)���������ѽ�(j��ng)���F(xi��n)�˱��������݃x����ٶȂ���������ĵ������O(sh��)�䣬�����n���O(sh��)Ӌ(j��)�Դ˞��n�}���п����ԡ�
- �n���O(sh��)Ӌ(j��)�������O(sh��)Ӌ(j��)���x
�F(xi��n)�����I(y��)���a(ch��n)�O(sh��)��İl(f��)չ���ڳ�������ͻ������ٻ����B�m(x��)�����Ԅ�(d��ng)���ķ���l(f��)չ�����(f��)�s�̶��������ӣ����漰��֪�R(sh��)�����V�������������C(j��)е�O(sh��)Ӌ(j��)�����ϿƌW(xu��)���F(xi��n)���ּ�����Ӌ(j��)��C(j��)���g(sh��)����W(xu��)���·���g(sh��)�ȣ��䲻���r(ji��)���F���S�o(h��)Ҳͬ���韩���挦(du��)�������ęC(j��)е�O(sh��)�䣬�҂������ҪһЩ�x���x����M(j��n)���o���z���c�y(c��)ԇ���҂�ϣ���@Щ�x���x������һ�������ܣ�����Ҫ���Ќ�(sh��)�r(sh��)�z�y(c��)���Ԅ�(d��ng)��(b��o)�����Y(ji��)���@ʾ�c����ȹ��ܣ�߀Ҫ�����w�eС�������p�����ڔy���ȃ�(y��u)�c(di��n)��Ȼ�����y(t��ng)�ęC(j��)늃x���mȻ�߂�ijЩ��(y��u)�c(di��n)�����䱾��Ҳ�ǙC(j��)��늡��⡢��ĽY(ji��)�����ʹ���c�S�o(h��)Ҳ�ஔ(d��ng)?sh��)ď?f��)�s�������ڮ�(d��ng)��C(j��)е�O(sh��)��İl(f��)չ�� �S���F(xi��n)���W(w��ng)�j(lu��)���g(sh��)�İl(f��)չ����I(y��)Ҏ(gu��)ģ�Ŀ��ٔU(ku��)���ܪ�(d��)���Ľ����x�Ă��y(t��ng)�x���y(c��)���Ѳ��ܝM�㹤�I(y��)�����h(yu��n)���x�Ҵ�Ҏ(gu��)ģ�Ĝy(c��)��?j��)x��Ⱥ����δ���l(f��)չ��څ��(sh��)�����ڂ��y(t��ng)�ăx����ģ�M��̖(h��o)��������Ӌ(j��)��C(j��)�Ŀ����c�\(y��n)�㣬�������܄��άF(xi��n)����I(y��)���������g(sh��)�l(f��)չ����Ҫ�� ���Ϸ������҂����R(sh��)�����y(t��ng)�Ĝy(c��)��?j��)x���ڳɱ��r(ji��)���������g(sh��)��������(ji��n)���Եȷ�����������㣬���ܝM�����(hu��)����Ҫ����������l(f��)չ������̓�M�x�����g(sh��)�t�ڳɱ��r(ji��)���������g(sh��)��������(ji��n)���Է����������ı��F(xi��n)���ܺܺõĝM��F(xi��n)���ƌW(xu��)���g(sh��)�l(f��)չ����Ҫ���ǃx���x��δ���l(f��)չ�ĵ���Ҫ���� ���S������MPU6050�����V����(y��ng)���ڸ���(g��)�I(l��ng)����δ�������O(sh��)���в��ɻ�ȱ����ҪԪ���������֙C(j��)��ƽ���b���O(sh��)�䡢�ֳ����Α�a(ch��n)Ʒ���Α�C(j��)��3D�b�������ɔyʽ��(d��o)���O(sh��)�䡣
- �O(sh��)Ӌ(j��)����ܛ�����O(sh��)Ӌ(j��)Ҏ(gu��)��
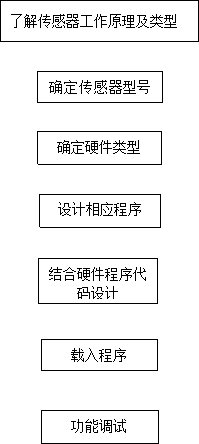
���n���O(sh��)Ӌ(j��)����MDK�h(hu��n)������ɵģ�����C�Z���M(j��n)�о��̣���ȫ��������?q��)�����_�l(f��)˼�룬���кܴ�Ă�(g��)�˰l(f��)�]���g�����ͬһ�N���ܿ��ԏIJ�ͬ�������ֽ�Q��MDKԴ�Ե�(gu��)��KEIL��˾����RealView MDK�ĺ�(ji��n)�Q����ȫ��MDK�����^10�f��Ƕ��ʽ�_�l(f��)���̎�ʹ�á�Ŀǰ���°汾�飺MDK5.14��ԓ�汾�� uVision5 IDE�����_�l(f��)�h(hu��n)������Ŀǰᘌ�(du��)ARM̎������������Cortex M��(n��i)��̎����������_�l(f��)���ߡ� �O(sh��)Ӌ(j��)Ҏ(gu��)���� ᘌ�(du��)�˴��n���O(sh��)Ӌ(j��)���O(sh��)Ӌ(j��)����Ҏ(gu��)������D2.1��ʾ��
�D2.1 �n���O(sh��)Ӌ(j��)Ҏ(gu��)�� ������Ҫ��(du��)�n���O(sh��)Ӌ(j��)�ı����M(j��n)���˽�B����(du��)�O(sh��)Ӌ(j��)�M(j��n)��Ҏ(gu��)�����ƶ��������Ĺ������̡� 3 Ӳ��ϵ�y(t��ng)�O(sh��)Ӌ(j��)�A�Ǽ��ٶșz�y(c��)ϵ�y(t��ng)����ҪҪ��Ɍ�(du��)�ضȡ����ٶȡ��Aб�ǵIJɼ����@ʾ�ȹ��������y(t��ng)�ϲɼ����ٶ����õ������S���ٶȂ��������ɼ��Aб�����õ������S���݃x��ᘌ�(du��)�����n���O(sh��)Ӌ(j��)Ҫ��ɱ�����(du��)�^�ߡ��b������ԭ��ϵ�y(t��ng)����MPU6050���S���݃x������Ă��������ⲿ��(sh��)��(j��)��̖(h��o)��(j��ng) MPU6050��ݔ���ģ�M��̖(h��o)�D(zhu��n)�Q�ɔ�(sh��)����̖(h��o)����ͨ�^IO�ڂ��͵���Ƭ�C(j��)ϵ�y(t��ng)( STM32RCT6)����Ƭ�C(j��)ϵ�y(t��ng)�����յĔ�(sh��)����̖(h��o)�g�a̎����ͨ�^TFTLCD���ضȼ�����(g��)����A���@ʾ��������D3.1�f��ʾ��
�D3.1 �O(sh��)Ӌ(j��)���w�ܘ�(g��u)��Ҋ������ 3.2.1MCU���x�������� STM32F103RCT6��ST��˾�Ƴ���һ����CortexM3������O(sh��)Ӌ(j��)��32λ��Ƭ�C(j��)���h(yu��n)��8λ51��Ƭ�C(j��)���ܳ�ɫ����O(sh��)Ӌ(j��)�΄�(w��)��STM32�ă�(y��u)�����w�F(xi��n)�����ׂ�(g��)���档 1.���͵ăr(ji��)����8λ�C(j��)�ăr(ji��)�õ�32λ�C(j��)����STM32���ă�(y��u)��(sh��)�� 2.��������O(sh��)��STM32���а�����FSMC��TIMER��SPI��IIC��USB��CAN��IIS��SDIO��ADC��DAC��RTC��DMA�ȱ������O(sh��)�����ܣ����ИO�ߵļ��ɶȡ� 3.�S������̖(h��o)��STM32�HM3��(n��i)�˾͓���F100��F101��F102��F103��F105��F107��F207��F217��8��(g��)ϵ���ϰٷN��̖(h��o)������QFN��LQFP��BGA�ȷ��b�ɹ��x��ͬ�r(sh��)STM32߀�Ƴ���STM32L��STM32W�ȳ����ĺ͟o����(y��ng)���͵�M3оƬ�� 4.��(y��u)���Č�(sh��)�r(sh��)���ܡ�84��(g��)�Д࣬16��(j��)�ɾ��̃�(y��u)�ȼ�(j��)���������е����_�����������Д�ݔ�롣 5.�ܳ��Ĺ��Ŀ��ơ�STM32����(g��)���O(sh��)�����Լ��Ī�(d��)���r(sh��)��_�P(gu��n)������ͨ�^�P(gu��n)�]����(y��ng)���O(sh��)�ĕr(sh��)犁������ġ� 6.�O�͵��_�l(f��)�ɱ���STM32���_�l(f��)����Ҫ���F�ķ�������ֻ��Ҫһ��(g��)���ڼ������d���a������֧��SWD��JTAG�ɷN�{(di��o)ԇ�ڡ�SWD�{(di��o)ԇ���Ԟ�����O(sh��)Ӌ(j��)��������ķ��㣬ֻ��Ҫ2��(g��)IO�ڣ����Ɍ�(sh��)�F(xi��n)�����{(di��o)ԇ�� 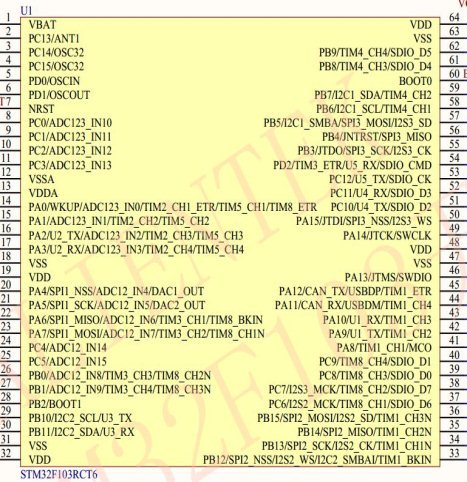
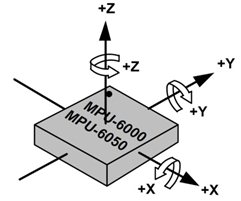
STM32F103RCT6ԭ��D,��D3.2��ʾ�� �D3.2 MCUԭ��D 3.2.2 ���������x�������� �O(sh��)Ӌ(j��)Ҫ����Ɍ�(du��)�Aб�ǡ����ٶȺ͜ضȵęz�y(c��)���������Ҫ��քe��Ҫ3�S���݃x��3�S���ٶȂ��Ђ��������ضȂ��������]���ɱ��ȸ��������ر����n���O(sh��)Ӌ(j��)�x�þ��ж�N���ܵ�6�S��������MPU6050������Ɍ�(du��)��(sh��)��(j��)�ęz�y(c��)�� MPU6050 �� InvenSense ��˾�Ƴ���ȫ���������� 6 �S�\(y��n)��(d��ng)̎���M�������^�ڶ�M������������˽M�����݃x�c�������r(sh��)֮�S�g��Ć��}���p���˰��b���g��MPU6050 ��(n��i)�������� 3 �S���݃x�� 3 �S���ٶȂ����������Һ���һ��(g��)�ڶ� IIC �ӿڣ��������B���ⲿ�������������������Ԏ��Ĕ�(sh��)���\(y��n)��(d��ng)̎������DMP: Digital Motion Processor��Ӳ���������棬ͨ�^�� IIC �ӿڣ���(y��ng)�ö�ݔ�������� 9 �S�ں����㔵(sh��)��(j��)������ DMP���҂�����ʹ��InvenSense ��˾�ṩ���\(y��n)��(d��ng)̎���Y�ώ죬�dz�����Č�(sh��)�F(xi��n)�ˑB(t��i)���㣬�������\(y��n)��(d��ng)̎���\(y��n)�㌦(du��)����ϵ�y(t��ng)��ؓ(f��)�ɣ�ͬ�r(sh��)������_�l(f��)�y�ȡ� MPU6050 �����c(di��n)������
�� �Ԕ�(sh��)����ʽݔ�� 6 �S�� 9 �S������Ӵł������������D(zhu��n)��ꇡ���Ԫ��(sh��)(quaternion)���W���Ǹ�ʽ���ں����㔵(sh��)��(j��)���� DMP ֧�֣��� �� ���� 131 LSBs/�� /sec ���ж��cȫ��Мy(c��)�������250����500����1000 �c��2000�� /sec�� 3 �S���ٶȸМy(c��)��(���݃x)�� �� ���ɿɳ�����ƣ��������2g����4g����8g �͡�16g �� 3 �S���ٶȂ������� �� �Ƴ��������c���݃x�S�g���жȣ������O(sh��)���o���Ӱ��c�Мy(c��)�����h�ơ� �� �Ԏ���(sh��)���\(y��n)��(d��ng)̎��(DMP: Digital Motion Processing)����ɜp�� MCU ��(f��)�s���ں����㔵(sh��)��(j��)���Мy(c��)��ͬ�������˄�(sh��)�Б�(y��ng)�ȵ�ؓ(f��)�ɡ� �� �\(y��n)���r(sh��)�gƫ���c�����Мy(c��)��У�����㼼�g(sh��)�������������M(j��n)��У�������� �� �Ԏ�һ��(g��)��(sh��)�֜ضȂ������� �� ����(sh��)��ݔ��ͬ�����_(Sync pin)֧��ҕ�l���Ӱ��(w��n)�����g(sh��)�cGPS�� �� �ɳ�����Ƶ��Д�(interrupt)��֧���˄�(sh��)�R(sh��)�e���u�z������Ŵ�sС���L��(d��ng)�������½��Дࡢ high-G �Дࡢ��(d��ng)���Б�(y��ng)���|���Б�(y��ng)���u��(d��ng)�Б�(y��ng)���ܡ� �� VDD ���늉��� 2.5V��5%�� 3.0V��5%�� 3.3V��5%�� VLOGIC �ɵ��� 1.8V ⑪ ���݃x��������� 5mA�����݃x���C(j��)����� 5uA����������������� 500uA��������ʡ�ģʽ����� 40uA@10Hz�� ⑫ �Ԏ� 1024 �ֹ�(ji��) FIFO�������ڽ���ϵ�y(t��ng)���ġ� ⑬ ���_(d��) 400Khz �� IIC ͨ�Žӿڡ� ⑭ ��С���b�ߴ磺 4x4x0.9mm��QFN���� 
MPU6050��������(sh��)��D��3.3��ʾ����z�y(c��)�S��D3.4��ʾ��
3.3 MPU6050��(sh��)��D �D3.4 MPU605�z�y(c��)�S���� 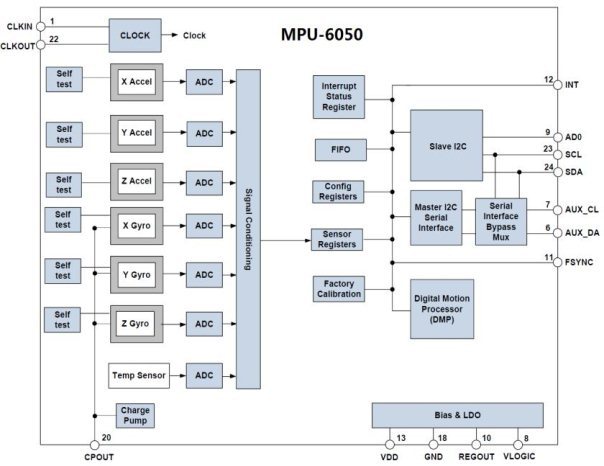
MPU6050�ă�(n��i)����D��D3.5��ʾ��
�D3.5 MPU��(n��i)����D ����SCL��SDA���B��MCU��IIC�ӿڣ�MCUͨ�^�@��(g��)IIC�ӿڿ�MPU6050������߀��һ��(g��)IIC�ӿڣ�AUX_CL��AUX_DA���@��(g��)�ӿڿ��Á��B���ⲿ���O(sh��)�䣬����ł��������@�ӾͿ��ԽM��һ��(g��)9�S��������VLOGIC��IO��늉���ԓ���_��Ϳ��Ե�1.8V���҂�һ��ֱ�ӽ�VDD���ɡ�AD0�Ǐ�IIC�ӿڣ���MCU���ĵ�ַ�������_��ԓ���_����IIC��ַ�����λ�������GND���tMPU6050��IIC��ַ�ǣ�0X68�������VDD���t��0X69��MPU6050����·��D3.6��ʾ�� �D3.6 MPU6050����·�D MPU6050����ԭ����  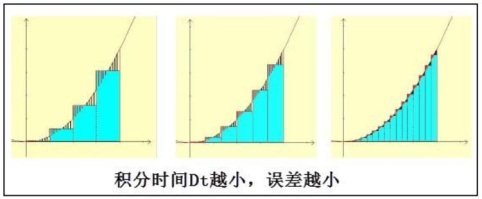
���݃x�z�y(c��)Ҳ������ȫ���_�ģ�����һ�����`��������݃x�y(c��)���Ƕȕr(sh��)ʹ�÷e �D3.7 �e���`��
�֣���(hu��)���ڷe���`���D3.7��ʾ�����e�֕r(sh��)�gDtԽС���`���ԽС���@ʮ���������⣬����Ӌ(j��)��·�̕r(sh��)�����O(sh��)��܇�r(sh��)�g�� 1 С�r(sh��)���҂��S�C(j��)�x����܇�^��ij��(g��)�r(sh��)�̵��ٶ�Vt����1С�r(sh��)�������·���`���ǘO��ģ���?y��n)���܇���^���в�����ÿ��(g��)�r(sh��)�̶�����ԓ�r(sh��)���ٶȵģ�����҂�ÿ5��犙z�y(c��)һ��܇�٣��ɵõ�Vt1��Vt2��Vt3-Vt12�@12��(g��)�r(sh��)�̵�܇�٣���(du��)����(g��)�r(sh��)�̵��ٶȳ��ԕr(sh��)�g�g��(5���)������(du��)�@12��(g��)�Y(ji��)����ͣ��Ϳɵó�һ��(g��)����(du��)���_����܇·���ˣ�������߲ɘ��l�ʣ��Ϳ���ʹ�e�֕r(sh��)�gDt׃С�������`� ͬ�ӵأ�������݃x�������IJɘ��l�ʣ����ɜp�ٷe���`�Ŀǰ�dz���ͨ�����݃x�������IJɘ��l�ʶ������_(d��)��8KHz�����ܝM��֑�(y��ng)�õľ���Ҫ�� ���y�Խ�Q�������������`����Ć��}�����磬ij�N���݃x���`����0.1��/�룬��(d��ng)���݃x�oֹ����(d��ng)�r(sh��)������Ľ��ٶȑ�(y��ng)��0���oՓ���oֹ��ã���(du��)���M(j��n)�зe�֜y(c��)�� �õ����D(zhu��n)�Ƕȶ���0���@������Ġ�B(t��i)�������ڴ���0.1��/����`���(d��ng)���݃x�oֹ����(d��ng)�r(sh��)�����ɘӵõĽ��ٶ�һֱ��0.1��/�룬���oֹ��1��犣���(du��)���M(j��n)�зe�֜y(c��)���õ����D(zhu��n)�ǶȞ�6�ȣ����oֹ��1С�r(sh��)�����݃x�M(j��n)�зe�֜y(c��)���õ����D(zhu��n)�ǶȾ���360�ȣ����D(zhu��n)�^��һ��Ȧ��ֻ�Ю�(d��ng)�������`���ؓ(f��)�����`�������û�������ĕr(sh��)���������@�N��Ӌ(j��)�`� ���S���ٶ��������z�y(c��)ԭ���� 
����ֱ�������݃x�y(c��)���Ƕ����L(zh��ng)�r(sh��)�g�y(c��)���r(sh��)��(hu��)�a(ch��n)����Ӌ(j��)�`������˙z�y(c��)�A�ǵĂ��������y(c��)��?j��)A���Ҋ�������ǽ�����ʹ�õ�ˮƽ�x����������Ӱ��£�ˮƽ�x��(n��i)�Ě����ܴ��·�ӳˮ������ֱ���c��������ĊA���P(gu��n)ϵ�����ÈD3.8�е�T����ˮƽ�x�����ԙz�y(c��)���M�L���c�����ǣ���ƫ�����ǟo�����@�ӵķ�ʽ�z�y(c��)�ġ�������O(sh��)���У�һ��ʹ�ü��ٶȂ�������z�y(c��)�A�ǣ���ͨ�^�z�y(c��)�����ڸ���(g��)�������׃��r���ɘӵõ�������(sh��)��(j��)������(j��)F=ma�D(zhu��n)�Q��������ֱ��ݔ�����ٶȔ�(sh��)��(j��)��������Q����ٶȂ����������ڵ������������(ch��ng)�������������κΕr(sh��)�̶���(hu��)�����ڂ���������(d��ng)�������oֹ�ĕr(sh��)��(��(sh��)�H�ϼ��ٶȞ�0)����������(hu��)��ԓ����z�y(c��)�����ٶ�g�������J(r��n)����������y(c��)���ļ��ٶȞ�g���ͱ�ʾ��������ԓ���������ٶȞ�g���\(y��n)��(d��ng)�� �D3.8 T����ˮƽ�x 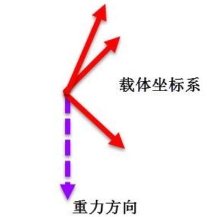
��(d��ng)���������ˑB(t��i)��ͬ�r(sh��)��������������(g��)����(bi��o)�S�z�y(c��)�����������ٶ��Dz�һ������
������Ĝy(c��)���Y(ji��)��������(j��)���ķֽ�ԭ�������������(g��)����(bi��o)�S�c����֮�g�ĊA�ǣ���D3.9��ʾ�� �D3.9 �����z�y(c��) ��?y��n)������������c��������(bi��o)ϵ�ġ���ء��S���B�ģ�����ͨ�^�y(c��)���d�w����(bi��o)ϵ�����S�c��������ĊA�Ǽ���������c��������(bi��o)ϵ�ĽǶ����D(zhu��n)�P(gu��n)ϵ���Ķ��@֪�d�w�ˑB(t��i)�� �Ӷ����������z�y(c��)���`���� �����@�N�A�Ǚz�y(c��)��ʽ�����������M(j��n)�Йz�y(c��)�ģ����o���z�y(c��)��ƫ����(Yaw)��ԭ���� T����ˮƽ�xһ�ӣ��oՓ����O(sh��)Ӌ(j��)ˮƽ�x��ˮ�ݶ��o��ָʾ�@�ӵĽǶȡ� ��һ��(g��)ȱ���Ǽ��ٶȂ�����������(hu��)�^(q��)���������ٶ��c�������ٶȣ���(d��ng)���w�\(y��n)��(d��ng)�ĕr(sh��)����Ҳ��(hu��)���\(y��n)��(d��ng)�ķ���z�y(c��)�����ٶȣ��e������(d��ng)�Ġ�B(t��i)�£��������Ĕ�(sh��)��(j��)��(hu��)�зdz���Ĕ�(sh��)��(j��)׃�����˕r(sh��)�y�Է���(y��ng)�����Č�(sh��)�Hֵ�� ���ôň�(ch��ng)�z�y(c��)�Ƕ� ���ˏ��a(b��)���ٶȂ������o���z�y(c��)ƫ����(Yaw)�Ć��}���҂�?c��)�����ň?ch��ng)�z�y(c��)�������������ԙz�y(c��)������(g��)�����ϵĴň�(ch��ng)��С��ͨ�^�z�y(c��)����ň�(ch��ng)�����Ɍ�(sh��)�F(xi��n)ָ��ᘵĹ��ܣ�����Ҳ���Q������_�P�����ڵشň�(ch��ng)�c��������(bi��o)ϵ�ġ��ϱ����S����(li��n)�������ôň�(ch��ng)�z�y(c��)��������ָ��ᘹ��ܣ��Ϳ��Ԝy(c��)����ƫ����(Yaw)�ˡ� �ň�(ch��ng)�z�y(c��)�����`�� �cָ��ᘵ�ȱ��һ�ӣ�ʹ�ôň�(ch��ng)��������(hu��)�ܵ��ⲿ�ň�(ch��ng)�ɔ_�����d�w������늴ň�(ch��ng)�ɔ_��������ͬ�h(hu��n)���Ĵ��F�V�ɔ_�ȵȡ� �ˑB(t��i)�ں��c��Ԫ��(sh��) ���l(f��)�F(xi��n)��ʹ�����݃x�z�y(c��)�Ƕȕr(sh��)�����oֹ?f��n)�B(t��i)�´���ȱ�ݣ����ܕr(sh��)�gӰ푣������ٶȂ������z�y(c��)�Ƕȕr(sh��)�����\(y��n)��(d��ng)��B(t��i)�´���ȱ�ݣ��Ҳ��ܕr(sh��)�gӰ푣����û��a(b��)�������҂�ͬ�r(sh��)ʹ���@�ɷN�����������O(sh��)Ӌ(j��)һ��(g��)�V���㷨����(d��ng)���w̎���oֹ?f��n)�B(t��i)�r(sh��)��������ٶȔ�(sh��)��(j��)�ę�(qu��n)�أ���(d��ng)���w̎���\(y��n)��(d��ng)��r(sh��)�� �������݃x��(sh��)��(j��)�ę�(qu��n)�أ��Ķ��@�ø���(zh��n)�_���ˑB(t��i)��(sh��)��(j��)��ͬ�����z�y(c��)ƫ���ǣ���(d��ng)�d�w���oֹ?f��n)�B(t��i)�r(sh��)��������ň�(ch��ng)�z�y(c��)����(sh��)��(j��)�ę�(qu��n)�أ���(d��ng)�d�w���\(y��n)��(d��ng)��B(t��i)�r(sh��)���������݃x�� GPS �z�y(c��)��(sh��)��(j��)�ę�(qu��n)�ء��@Щ���ö�N��������(sh��)��(j��)��z�y(c��)�ˑB(t��i)��̎���㷨���Q���ˑB(t��i)�ںϡ� ���ˑB(t��i)�ںϽ���ĕr(sh��)��ʹ�á���Ԫ��(sh��)������ʾ�ˑB(t��i)����������(g��)��(sh��)��(sh��)��һ��(g��)̓��(sh��)�M�ɣ�������Q֮����Ԫ��(sh��)��ʹ����Ԫ��(sh��)��ʾ�ˑB(t��i)����ֱ�^������?y��n)�ʹ�ÚW����(��ǰ���f��ƫ���ǡ��M�L�Ǽ�������)��ʾ�ˑB(t��i)�ĕr(sh��)���(hu��)�С��f��(ji��)���i�����}�����\(y��n)����^��(f��)�s������һ���ڔ�(sh��)��(j��)̎���ĕr(sh��)���(hu��)ʹ����Ԫ��(sh��)��̎���ꮅ���ٰ���Ԫ��(sh��)�D(zhu��n)�Q�ɚW���ǡ�
- ϵ�y(t��ng)ģ�K���ܼ��ӿ��O(sh��)Ӌ(j��)
ԓ�O(sh��)Ӌ(j��)���þ�ӢSTM32F1�_�l(f��)���IIC�ӿ��B��MPU6050ģ�K������(sh��)�(y��n)���ܺ�(ji��n)�飺�����ȳ�ʼ��MPU6050�����O(sh��)��Ȼ������DMP�죬��ʼ��MPU6050��ʹDMP���������ѭ�h(hu��n)���治ͣ�xȡ���ضȂ����������ٶȂ����������݃x��DMP�ˑB(t��i)�����ĚW���ǵȔ�(sh��)��(j��)��ͨ�^�����ψ�(b��o)�o��λ�C(j��)���ضȲ��ψ�(b��o)����������λ�C(j��)ܛ�������Ԍ�(sh��)�r(sh��)�@ʾ MPU6050 �Ă�������B(t��i)���������@ʾ3D�ˑB(t��i)������ͨ�^KEY0 ���I�_��/�P(gu��n)�]��(sh��)��(j��)�ς����ܡ�ͬ�r(sh��)���� LCD ģ�K�����@ʾ�ضȺ͚W���ǵ���Ϣ��DS0��ָʾ���������\(y��n)�С� MPU6050���_�f�� ԓģ�K����8��(g��)���_�����f�����3.1��ʾ�� ��3.1 MPU6050�������_�f��  ��̖(h��o) ���_���Q �f�� 1  VCC 3.3/5V �Դݔ�� 2 GND �ؾ� 3 SCL I2C�ĕr(sh��)���̖(h��o)��SCL��ģ�K���ѽ�������裩 4 SDA I2C�Ĕ�(sh��)��(j��)��̖(h��o)��SDA��ģ�K���ѽ�������裩 5 XDA I2C�����Д�(sh��)��(j��)��̖(h��o)����������ӂ����� 6 XCL I2C�����Д�(sh��)��(j��)��̖(h��o)����������ӂ����� 7 AD0 �ęC(j��)��ַ�O(sh��)�����_���ӵػ�ҿգ���ַ�飺0X68 ��VCC�r(sh��)����ַ�飺0X69 8 INT �Д�ݔ�����_ ���е�SDA/SCL��XDA/XCLͨӍ���_�քe��ɽMI2C��̖(h��o)������(d��ng)ģ�K�c�ⲿ���C(j��)ͨӍ�r(sh��)��ʹ��SDA/SCL�����cSTM32оƬͨӍ����XDA/XCL�t����MPU6050оƬ�c����I2C������ͨӍ�r(sh��)ʹ�ã�����ʹ�����c�ň�(ch��ng)�������B�ӣ�MPU6050ģ�K���я����C(j��)SDA/SCL���յĔ�(sh��)��(j��)������ͨ�^XDA/XCL���_�D(zhu��n)�l(f��)���ň�(ch��ng)�������С�����(sh��)�H���@�N���ܱ��^�u�ߣ������韩��Ч�ʵͣ�һ���(hu��)ֱ�ӰѴň�(ch��ng)������֮�I2C������ֱ���cMPU6050���d��ͬһ�l�����ϣ������B�ӵ�SDA/SCL����ʹ�����C(j��)ֱ�ӿ��ơ� 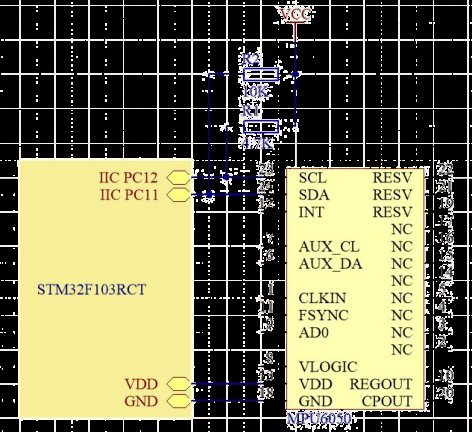
��Ҫ�õ���Ӳ���YԴ��Ҫ��STM32�_�l(f��)���MPU6050ģ�K���������B�ӷ�ʽ��D3.10��ʾ��MPU6050ģ�K�c�ⲿ�B�ӣ�������VCC��GND��IIC_SDA��IIC_SCL��MPU_INT��MPU_AD0����̖(h��o)�����У�IIC_SDA��IIC_SCL����4.7K������裬�ⲿ���Բ����ټ���������ˣ�����MPU_AD0�Ԏ���10K������裬��(d��ng)AD0 �ҿՕr(sh��)��Ĭ�J(r��n)IIC��ַ�飨0X68����ģ�K��IIC_SCL��IIC_SDA�քe�B����STM32��PC12��PC11���档XDA��XCL���Á�U(ku��)չ�B�Ӵ���������ʹMPU6050�D(zhu��n)�Q�顰���S����������  �D3.10 �B�ӷ�ʽ�D ������Ҫ��BCMU���x�����O(sh��)���Լ����N�������y(c��)�Ƕȵ�ԭ����ȱ�ݣ�MPU6050�����ˑB(t��i)�ں��㷨���a(b��)���y(t��ng)�������O(sh��)Ӌ(j��)ȱ�ݡ�MPU6050����(g��)�ӿڵĹ��ܽ�B����Ƭ�C(j��)�cMPU6050�B�ӷ�ʽ���O(sh��)Ӌ(j��)��
4 ܛ��ϵ�y(t��ng)�O(sh��)Ӌ(j��)
- ܛ��ϵ�y(t��ng)���w�����O(sh��)Ӌ(j��)
ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)�h(hu��n)����MDK��ܛ���O(sh��)Ӌ(j��)��������ģ�K��MPU6050����ģ�K������ͨӍģ�K�Լ�Һ���(q��)��(d��ng)����ģ�K�M�ɡ� 1����ʼ��IIC�ӿ� MPU6050����IIC�cSTM32F1ͨ�ţ������҂���Ҫ�ȳ�ʼ���cMPU6050�B�ӵ�SDA��SCL��(sh��)��(j��)���� 2����(f��)λMPU6050 �@һ��MPU6050��(n��i)�����мĴ����֏�(f��)Ĭ�J(r��n)ֵ��ͨ�^��(du��)�Դ�����Ĵ���1��0X6B����bit7��1��(sh��)�F(xi��n)����(f��)λ���Դ�����Ĵ���1�֏�(f��)Ĭ�J(r��n)ֵ(0X40)��Ȼ�����O(sh��)��ԓ�Ĵ�����0X00���Ԇ���MPU6050���M(j��n)������������B(t��i)�� 3���O(sh��)�ý��ٶȂ����������݃x���ͼ��ٶȂ������ĝM���̷��� �@һ�����O(sh��)�Ãɂ�(g��)�������ĝM���̷���(FSR)���քeͨ�^���݃x���üĴ�����0X1B���ͼ��ٶȂ��������üĴ�����0X1C���O(sh��)�á��҂�һ���O(sh��)�����݃x�ĝM���̷������2000dps�����ٶȂ������ĝM���̷���λ��2g�� 4���O(sh��)����������(sh��) �@��҂�߀��Ҫ���õą���(sh��)�У��P(gu��n)�]�Дࡢ�P(gu��n)�]AUX IIC�ӿڡ���ֹFIFO���O(sh��)�����݃x�ɘ��ʺ��O(sh��)�Ô�(sh��)�ֵ�ͨ�V������DLPF���ȡ������҂������Дʽ�xȡ��(sh��)��(j��)�������P(gu��n)�]�Д࣬Ȼ��Ҳ�]�õ� AUX IIC �ӿ��������������������Ҳ�P(gu��n)�]�@��(g��)�ӿڡ��քeͨ�^�Д�ʹ�ܼĴ�����0X38�����Ñ����ƼĴ�����0X6A�����ơ�MPU6050����ʹ��FIFO�惦(ch��)��������(sh��)��(j��)�����^�����҂��]���õ��������P(gu��n)�]����FIFOͨ�����@��(g��)ͨ�^FIFOʹ�ܼĴ�����0X23�����ƣ�Ĭ�J(r��n)����0������ֹ FIFO����������Ĭ�J(r��n)ֵ�Ϳ����ˡ����݃x�ɘ���ͨ�^�ɘ��ʷ��l�Ĵ�����0X19�����ƣ��@��(g��)�ɘ����҂�һ���O(sh��)�Þ�50���ɡ���(sh��)�ֵ�ͨ�V����(DLPF)�tͨ�^���üĴ�����0X1A���O(sh��)�ã�һ���O(sh��)��DLPF�鎧����1/2���ɡ� 5������ϵ�y(t��ng)�r(sh��)�Դ��ʹ�ܽ��ٶȂ������ͼ��ٶȂ����� ϵ�y(t��ng)�r(sh��)�Դͬ����ͨ�^�Դ�����Ĵ���1��0X6B�����O(sh��)�ã�ԓ�Ĵ����������λ�����O(sh��)��ϵ�y(t��ng)�r(sh��)�Դ�x��Ĭ�J(r��n)ֵ��0����(n��i)��8M RC��ʎ�������^�҂�һ���O(sh��)�Þ�1���x��x�S����PLL����r(sh��)�Դ���ԫ@�ø��߾��ȵĕr(sh��)犡�ͬ�r(sh��)��ʹ�ܽ��ٶȂ������ͼ��ٶȂ��������@�ɂ�(g��)����ͨ�^�Դ�����Ĵ���2��0X6C�����O(sh��)�ã��O(sh��)�Ì�(du��)��(y��ng)λ��0�����_�������ˣ�MPU6050�ij�ʼ��������ˣ��������������ˣ�����δ�O(sh��)�õļĴ���ȫ������Ĭ�J(r��n)ֵ���ɣ����������҂��Ϳ����xȡ���P(gu��n)�Ĵ������õ����ٶȂ����������ٶȂ������͜ضȂ������Ĕ�(sh��)��(j��)�ˡ�
- ������a�O(sh��)Ӌ(j��)�c����
- ������(sh��)���a�O(sh��)Ӌ(j��)�c����
- ������main����(sh��)��������Ҫ�IJ��ֳ���
- ���ڰl(f��)�ͳ���
- void usart1_send_char(u8 c)
- {
- while((USART1->SR&0X40)==0);//�ȴ���һ�ΰl(f��)���ꮅ
- USART1->DR=c;
- }
- //���͔�(sh��)��(j��)�o��λ�C(j��)ܛ��(
- void usart1_niming_report(u8 fun,u8*data,u8 len)
- {
- u8 send_buf[32];
- u8 i;
- if(len>28)return; //���28�ֹ�(ji��)��(sh��)��(j��)
- send_buf[len+3]=0; //�(y��n)��(sh��)����
- send_buf[0]=0X88; //���^
- send_buf[1]=fun; //������
- send_buf[2]=len; //��(sh��)��(j��)�L(zh��ng)��
- for(i=0;i<len;i++)send_buf[3+i]=data[i]; //��(f��)�Ɣ�(sh��)��(j��)
- for(i=0;i<len+3;i++)send_buf[len+3]+=send_buf[i]; //Ӌ(j��)��У�(y��n)��
- for(i=0;i<len+4;i++)usart1_send_char(send_buf[i]); //�l(f��)�͔�(sh��)��(j��)������1
- }
- //�l(f��)�ͼ��ٶȂ�������(sh��)��(j��)�����݃x��(sh��)��(j��)
- //aacx,aacy,aacz:x,y,z����(g��)��������ļ��ٶ�ֵ
- //gyrox,gyroy,gyroz:x,y,z����(g��)������������݃xֵ
- void mpu6050_send_data(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz)
- ͨ�^�����ψ�(b��o)�Y(ji��)�����ˑB(t��i)��(sh��)��(j��)�o��X��
- //aacx,aacy,aacz:x,y,z����(g��)��������ļ��ٶ�ֵ
- //gyrox,gyroy,gyroz:x,y,z����(g��)������������݃xֵ
- //roll:�M�L��.��λ0.01�ȡ� -18000 - 18000 ��(du��)��(y��ng) -180.00 - 180.00��
- //pitch:������.��λ 0.01�ȡ�-9000 - 9000 ��(du��)��(y��ng) -90.00 - 90.00 ��
- //yaw:�����.���0.1�� 0 �C 360��0�� ��(du��)��(y��ng) 0 -> 360.0��
- void usart1_report_imu(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz,short roll,short pitch,short yaw)
- LCD��ʼ����
- int main(void)
- {
- u8 t=0,report=1; //Ĭ�J(r��n)�_���ψ�(b��o)
- u8 key;
- float pitch,roll,yaw; //�W����
- short aacx,aacy,aacz; //���ٶȂ�����ԭʼ��(sh��)��(j��)
- short gyrox,gyroy,gyroz; //���݃xԭʼ��(sh��)��(j��)
- short temp; //�ض�
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
- delay_init(); //�ӕr(sh��)����(sh��)��ʼ��
- uart_init(500000); //���ڳ�ʼ����9600
- usmart_dev.init(72); //��ʼ��USMART
- LED_Init(); //��ʼ���cLED�B�ӵ�Ӳ���ӿ�
- KEY_Init(); //��ʼ�����I
- LCD_Init(); //��ʼ��LCD
- MPU_Init(); //��ʼ��MPU6050
- POINT_COLOR=RED; //�O(sh��)�����w��tɫ
- �@ʾ���@ʾ��(sh��)��(j��)��
- LCD_ShowString(30,50,200,16,16,"Wang Kai");
- LCD_ShowString(30,70,200,16,16,"MPU6050 TEST");
- LCD_ShowString(30,90,200,16,16,"HPU");
- LCD_ShowString(30,110,200,16,16,"2018/3/12");
- while(mpu_dmp_init())
- {
- LCD_ShowString(30,130,200,16,16,"MPU6050 Error");
- delay_ms(200);
- LCD_Fill(30,130,239,130+16,WHITE);
- delay_ms(200);
- }
- LCD_ShowString(30,130,200,16,16,"MPU6050 OK");
- LCD_ShowString(30,150,200,16,16,"KEY0:UPLOAD ON/OFF");
- POINT_COLOR=BLUE;//�O(sh��)�����w���{(l��n)ɫ
- LCD_ShowString(30,170,200,16,16,"UPLOAD ON ");
- LCD_ShowString(30,200,200,16,16," Temp: . C");
- LCD_ShowString(30,220,200,16,16,"Pitch: . C");
- LCD_ShowString(30,240,200,16,16," Roll: . C");
- LCD_ShowString(30,260,200,16,16," Yaw : . C");
- LCD_ShowString(30,280,200,16,16," Durriculum Design ");
- if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
- {
- temp=MPU_Get_Temperature(); //�õ��ض�ֵ
- MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //�õ����ٶȂ�������(sh��)��(j��)
- MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //�õ����݃x��(sh��)��(j��)
- if(report)mpu6050_send_data(aacx,aacy,aacz,gyrox,gyroy,gyroz);//���Զ��x���l(f��)�ͼ��ٶȺ����݃xԭʼ��(sh��)��(j��)
- ԭʼ��(sh��)��(j��)̎���� if(report)usart1_report_imu(aacx,aacy,aacz,gyrox,gyroy,gyroz,(int)(roll*100),(int)(pitch*100),(int)(yaw*10));
- if((t%10)==0)
- {
- if(temp<0)
- {
- LCD_ShowChar(30+48,200,'-',16,0); //�@ʾؓ(f��)̖(h��o)
- temp=-temp; //�D(zhu��n)������(sh��)
- }else LCD_ShowChar(30+48,200,' ',16,0);//ȥ��ؓ(f��)̖(h��o)
- LCD_ShowNum(30+48+8,200,temp/100,3,16);//�@ʾ����(sh��)���� LCD_ShowNum(30+48+40,200,temp%10,1,16);//�@ʾС��(sh��)���� temp=pitch*10;
- if(temp<0)
- {
- LCD_ShowChar(30+48,220,'-',16,0); //�@ʾؓ(f��)̖(h��o)
- temp=-temp; //�D(zhu��n)������(sh��)
- }else LCD_ShowChar(30+48,220,' ',16,0);//ȥ��ؓ(f��)̖(h��o)
- LCD_ShowNum(30+48+8,220,temp/10,3,16); //�@ʾ����(sh��)���� LCD_ShowNum(30+48+40,220,temp%10,1,16); //�@ʾС��(sh��)����
- temp=roll*10;
- if(temp<0)
- {
- LCD_ShowChar(30+48,240,'-',16,0); //�@ʾؓ(f��)̖(h��o)
- temp=-temp; //�D(zhu��n)������(sh��)
- }else LCD_ShowChar(30+48,240,' ',16,0);//ȥ��ؓ(f��)̖(h��o)
- LCD_ShowNum(30+48+8,240,temp/10,3,16); //�@ʾ����(sh��)����
- LCD_ShowNum(30+48+40,240,temp%10,1,16);//�@ʾС��(sh��)����
- temp=yaw*10;
- if(temp<0)
- {
- LCD_ShowChar(30+48,260,'-',16,0); //�@ʾؓ(f��)̖(h��o)
- temp=-temp; //�D(zhu��n)������(sh��)
- }else LCD_ShowChar(30+48,260,' ',16,0);//ȥ��ؓ(f��)̖(h��o)
- LCD_ShowNum(30+48+40,260,temp%10,1,16);//�@ʾС��(sh��)����
- t=0;
- LED0=!LED0;//LED�W�q
- }
- }
-
- 4.3.2 MPU6050�������
- MPU6050�����ʼ����
- u8 MPU_Init(void)
- {
- u8 res;
- MPU_IIC_Init();//��ʼ��IIC����
- MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //��(f��)λMPU6050
- delay_ms(100);
- MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //����MPU6050
- MPU_Set_Gyro_Fsr(3); //���݃x������,��2000dps
- MPU_Set_Accel_Fsr(0); //���ٶȂ�����,��2g
- MPU_Set_Rate(50); //�O(sh��)�òɘ���50Hz
- MPU_Write_Byte(MPU_INT_EN_REG,0X00); //�P(gu��n)�]������
- MPU_Write_Byte(MPU_USER_CTRL_REG,0X00);//I2C��ģʽ�P(gu��n)�]
- MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //�P(gu��n)�]FIFO
- MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80);//INT���_���ƽ��Ч
- res=MPU_Read_Byte(MPU_DEVICE_ID_REG);
- if(res==MPU_ADDR)//����ID���_
- {
- MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01);//�O(sh��)��CLKSEL,PLL X�S�酢��
- MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00);//���ٶ��c���݃x������
- MPU_Set_Rate(50); //�O(sh��)�òɘ��ʞ�50Hz
- }else return 1;
- return 0;
- }
- //�O(sh��)��MPU6050���݃x�������M���̷���
- //fsr:0,��250dps;1,��500dps;2,��1000dps;3,��2000dps
- //����ֵ:0,�O(sh��)�óɹ�
- // ����,�O(sh��)��ʧ��
- u8 MPU_Set_Gyro_Fsr(u8 fsr)
- {
- return MPU_Write_Byte(MPU_GYRO_CFG_REG,fsr<<3);//�O(sh��)�����݃x�M���̷���
- }
- �O(sh��)��MPU6050���ٶȂ������M���̷���
- //fsr:0,��2g;1,��4g;2,��8g;3,��16g
- //����ֵ:0,�O(sh��)�óɹ�
- // ����,�O(sh��)��ʧ��
- u8 MPU_Set_Accel_Fsr(u8 fsr)
- {
- return MPU_Write_Byte(MPU_ACCEL_CFG_REG,fsr<<3);//�O(sh��)�ü��ٶȂ������M���̷���
- }
- //�O(sh��)��MPU6050�Ĕ�(sh��)�ֵ�ͨ�V����
- //lpf:��(sh��)�ֵ�ͨ�V���l��(Hz)
- //����ֵ:0,�O(sh��)�óɹ�
- // ����,�O(sh��)��ʧ��
������Ҫ�dz�����a���O(sh��)Ӌ(j��)������(j��)Ӳ���O(sh��)Ӌ(j��)����(y��ng)�ij�������O(sh��)Ӌ(j��)Ҫ���΄�(w��)����������������(sh��)��LCD����(sh��)�����ں���(sh��)��
5 �����d���c�{(di��o)ԇ
- �{(di��o)ԇ�h(hu��n)���c����
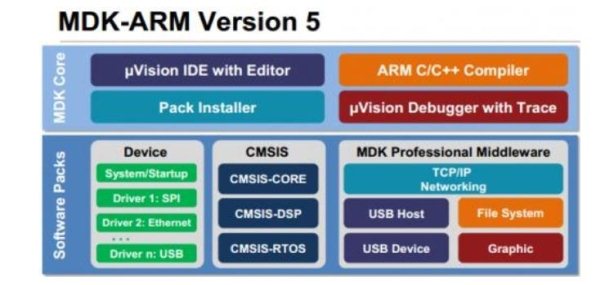
MDKԴ�Ե�(gu��)��KEIL��˾����RealView MDK�ĺ�(ji��n)�Q����ȫ��MDK�����^10�f��Ƕ��ʽ�_�l(f��)���̎�ʹ�á�Ŀǰ���°汾�飺MDK5.14��ԓ�汾ʹ��uVision5 IDE �����_�l(f��)�h(hu��n)������Ŀǰᘌ�(du��)ARM̎������������Cortex M ��(n��i)��̎����������_�l(f��)���ߡ�MDK5 ������MDK4��MDK3�ȣ���ǰ���(xi��ng)Ŀͬ�ӿ�����MDK5���M(j��n)���_�l(f��)(�����^�ļ������ȫ���Լ�����)��MDK5ͬ�r(sh��)�ӏ�(qi��ng)��ᘌ�(du��) Cortex-M�������_�l(f��)��֧�֣����Ҍ�(du��)���y(t��ng)���_�l(f��)ģʽ�ͽ����M(j��n)������(j��)��MDK5�Ƀɂ�(g��)���ֽM�ɣ�MDK Core �� Software Packs�����У�Software Packs ���Ԫ�(d��)���ڹ�����M(j��n)����оƬ֧�ֺ����g�������(j��)����D5.1��ʾ���D5.1 MDK�ܘ�(g��u)�D ���ψD���Կ�����MDK Core�ֳַ��Ă�(g��)���֣�uVision IDE with Editor����������ARM C/C++Compiler�����g������Pack Installer�������b������uVision Debugger with Trace���{(di��o)ԇ��ۙ������
- �{(di��o)ԇ�^�̼��F(xi��n)�����
��Ҫ�漰��Ӳ����USB TO TTLģ�K��MPU6050ģ�K��STM32F103RCT6��Сϵ�y(t��ng)�塢TFTҺ���@ʾ��,��D5.1��ʾ��
�D5.2 ϵ�y(t��ng)�B�ӈD 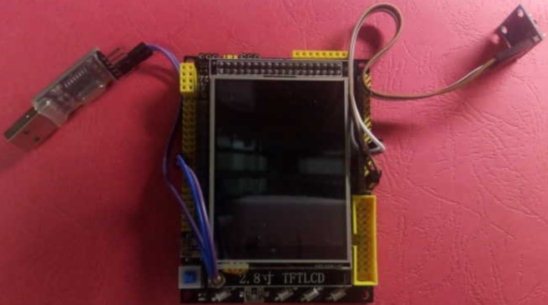
��(sh��)���B�ӈD����D5.3��ʾ��
USBTOTTL���ڼ��{(l��n)���ӿ��f���� VCC��VCC�� GND��GND�� TXD��RXD�� RXD��TXD�� MPU6050�ӿ��f���� VCC��VCC�� GND��GND�� SCL��PC12�� SDA��PC11�� INT��AD0δ�õ�����XDA��XCL���Á��ӔU(ku��)չ�� 5.2.2������ 
���ǰ�����İ��c��Xͨ�^�������B���������ѷ������ѷ������� USB ���B����X������������ğ����t��ʾ����������ʹ�á�Ȼ��ѷ�����������һ���B�ӵ��_�l(f��)�壬�o�_�l(f��)����늣�Ȼ��Ϳ���ͨ�^ܛ��MDK�o�_�l(f��)�����d������D5.4��ʾ����(sh��)���B�ӈD��5.5��ʾ�� �D5.4 �������c��X���_�l(f��)���B�ӷ�ʽ  ����ܛ��������D5.6��ʾ�� ����ܛ��������D5.6��ʾ��

�D5.6 �������ÈD
- ��(sh��)�(y��n)�F(xi��n)��������
�ڴ��a���g�ɹ�֮��ͨ�^���������d���a��STM32F103�_�l(f��)���ϣ����Կ��� LCD�@ʾ��D5.7��ʾ��  
��Ļ�@ʾ��MPU6050�Ĝضȡ������ǣ�pitch�����M�L�ǣ�roll���ͺ���ǣ�yaw���Ĕ�(sh��)ֵ���΄�(d��ng)MPU6050���������Ƕ��S֮׃�������⣬ͨ�^��KEY0�����_�����P(gu��n)�]��(sh��)��(j��)�ψ�(b��o)���_����B(t��i)�£����_��X����λ�C(j��)������STM32F1�ς��Ĕ�(sh��)��(j��)���Ķ��D�λ��@ʾ��������(sh��)��(j��)����������(sh��)��(j��)�����@ʾ��D5.8��ʾ�� 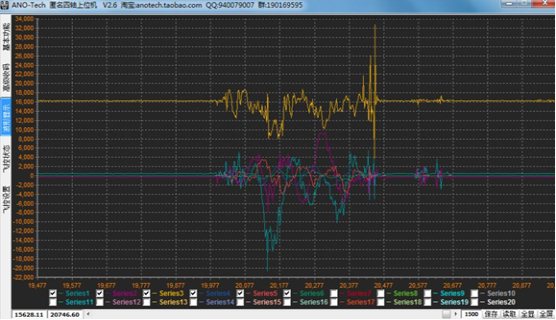
�D5.8 ��λ�C(j��)�y(c��)ԇ�D ���Ͼ��Dz��λ��@ʾ�҂�ͨ�^ mpu6050_send_data ����(sh��)�l(f��)�͵Ĕ�(sh��)��(j��)������ A1�����l(f��)�ͣ����� 6 �l����Series1~6���@ʾ���Σ�ȫ������ A1 ������ int16 ��(sh��)��(j��)��ʽ��Series1~6 �քe���������ٶȂ����� x/y/z �ͽ��ٶȂ����������݃x��x/y/z�����ԭʼ��(sh��)��(j��)���D 35.4.3 �t 3D �@ʾ���҂��_�l(f��)����ˑB(t��i)��ͨ�^usart1_report_imu����(sh��)�l(f��)�͵Ĕ�(sh��)��(j��)�@ʾ�������w���@ʾ����AF��ʽ�ς���ͬ�r(sh��)߀�@ʾ�˼��ٶ����݃x�Ȃ�������ԭʼ��(sh��)��(j��)���ڽ������(c��)�ġ��������ܡ��x�(xi��ng)�������O(sh��)�ú� USB ̓�M����̖(h��o)�Լ������ʣ�500000����Ȼ���ڡ��w�ؠ�B(t��i)���x�(xi��ng)���������������·��x�ϡ���(j��)�մa�����������@ʾ���͡����_���ڡ�����(g��)���o���ɡ������USMART�x�� MPU6050 ���κμĴ��������{(di��o)ԇ���a���� USMART �{(di��o)ԇ�ĕr(sh��)���Ȱ� KEY0 �P(gu��n)�]��(sh��)��(j��)�ς����ܣ���t��(hu��)�յ��ܶ��y�a���������O(sh��)�Þ飺500Kbps���O(sh��)�÷����� XCOM ���P(gu��n)�]���ڠ�B(t��i)�£��x���Զ��x�����ʣ�Ȼ��ݔ�룺500000���ٴ��_���ڣ����D5.9 �ǔ�(sh��)��(j��)������λ�C(j��)ģ�ͻ�������ĽY(ji��)���� 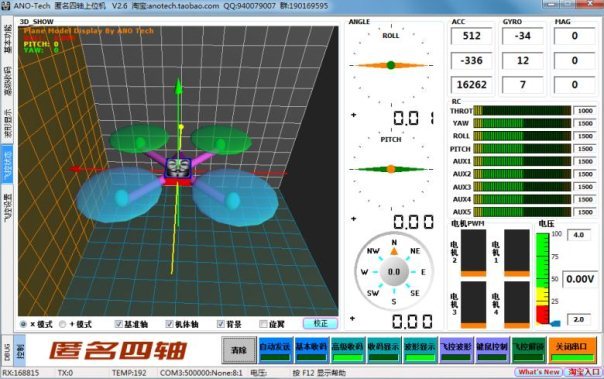
 ACC�������ٶ�ֵ��accx,accy,accz�քe����x,y,z����(g��)�����ϵļ��ٶ�ֵ�� GYRO�������݃xֵ��gyrox, gyroy, gyroz�քe�����¡�x,y,z����(g��)�����ϵ����݃xֵ�� 6 ���Y(ji��)�cչ���n���O(sh��)Ӌ(j��)���Y(ji��) ���n���O(sh��)Ӌ(j��)��(j��ng)�v�˃��ܵ�Ŭ�����n���O(sh��)Ӌ(j��)��Ҫ��Ƀ�(n��i)�����£� ��1����ϵ�y(t��ng)���O(sh��)Ӌ(j��)�ĽǶȼ��ٶșz�y(c��)�b������ˌ�(du��)�ضȽǶȼ��ٶȵČ�(sh��)�r(sh��)�z�y(c��)����������c��λ�C(j��)ͨ�ŵĹ��ܣ�����֮�⣬߀��ͨ�^�{(l��n)���c�֙C(j��)��ɔ�(sh��)��(j��)��ݔ�� ��2���㷨���治�����ƣ��y(c��)ԇ��(sh��)��(j��)���`�Ӳ��ʹ�öŰ�B�ӣ����ܵ����Ӱ푡� ����չ�� �����n���O(sh��)Ӌ(j��)�ī@���}Ŀ�_ʼ�����֜�(zh��n)�䣬���Ȳ�ԃ���P(gu��n)������ԭ�����xȡ�N�������M(j��n)�б��^�����_��MPU6050������Ҫ�������������MCU���xȡ�����]��51�ľ��������_��STM32F103RCT6������ġ�ͨ�^MDK�M(j��n)�г��������d���x����Jlink�������d���ߌ������d����İ塣ͨ�^����λ�C(j��)���M(j��n)�Д�(sh��)��(j��)�{(di��o)ԇ���ڱ����n���O(sh��)Ӌ(j��)�^���еõ������ώ��Լ��S��ͬ�W(xu��)�Ď��������x��Щ�ṩ�^���������ώ���ͬ�W(xu��)�� �n���O(sh��)Ӌ(j��)߀�кܶ�ط���Ҫ���M(j��n)�����Ժ�ČW(xu��)��(x��)������ȥ�Lԇ�����S���������M(j��n)�и�����(sh��)��(j��)�Ĝy(c��)ԇ��
- void usart1_send_char(u8 c)
- {
- while((USART1->SR&0X40)==0);//�ȴ���һ�ΰl(f��)���ꮅ
- USART1->DR=c;
- }
- //���͔�(sh��)��(j��)�o�������S��λ�C(j��)ܛ��(V2.6�汾)
- //fun:������. 0XA0~0XAF
- //data:��(sh��)��(j��)����^(q��),���28�ֹ�(ji��)!!
- //len:data�^(q��)����(sh��)��(j��)��(g��)��(sh��)
- void usart1_niming_report(u8 fun,u8*data,u8 len)
- {
- u8 send_buf[32];
- u8 i;
- if(len>28)return; //���28�ֹ�(ji��)��(sh��)��(j��)
- send_buf[len+3]=0; //�(y��n)��(sh��)����
- send_buf[0]=0X88; //���^
- send_buf[1]=fun; //������
- send_buf[2]=len; //��(sh��)��(j��)�L(zh��ng)��
- for(i=0;i<len;i++)send_buf[3+i]=data[i]; //��(f��)�Ɣ�(sh��)��(j��)
- for(i=0;i<len+3;i++)send_buf[len+3]+=send_buf[i]; //Ӌ(j��)��У�(y��n)��
- for(i=0;i<len+4;i++)usart1_send_char(send_buf[i]); //�l(f��)�͔�(sh��)��(j��)������1
- }
- //�l(f��)�ͼ��ٶȂ�������(sh��)��(j��)�����݃x��(sh��)��(j��)
- //aacx,aacy,aacz:x,y,z����(g��)��������ļ��ٶ�ֵ
- //gyrox,gyroy,gyroz:x,y,z����(g��)������������݃xֵ
- void mpu6050_send_data(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz)
- {
- u8 tbuf[12];
- tbuf[0]=(aacx>>8)&0XFF;
- tbuf[1]=aacx&0XFF;
- tbuf[2]=(aacy>>8)&0XFF;
- tbuf[3]=aacy&0XFF;
- tbuf[4]=(aacz>>8)&0XFF;
- tbuf[5]=aacz&0XFF;
- tbuf[6]=(gyrox>>8)&0XFF;
- tbuf[7]=gyrox&0XFF;
- tbuf[8]=(gyroy>>8)&0XFF;
- tbuf[9]=gyroy&0XFF;
- tbuf[10]=(gyroz>>8)&0XFF;
- tbuf[11]=gyroz&0XFF;
- usart1_niming_report(0XA1,tbuf,12);//�Զ��x��,0XA1
- }
- //ͨ�^����1�ψ�(b��o)�Y(ji��)�����ˑB(t��i)��(sh��)��(j��)�o��X
- //aacx,aacy,aacz:x,y,z����(g��)��������ļ��ٶ�ֵ
- //gyrox,gyroy,gyroz:x,y,z����(g��)������������݃xֵ
- //roll:�M�L��.��λ0.01�ȡ� -18000 -> 18000 ��(du��)��(y��ng) -180.00 -> 180.00��
- //pitch:������.��λ 0.01�ȡ�-9000 - 9000 ��(du��)��(y��ng) -90.00 -> 90.00 ��
- //yaw:�����.���0.1�� 0 -> 3600 ��(du��)��(y��ng) 0 -> 360.0��
- void usart1_report_imu(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz,short roll,short pitch,short yaw)
- {
- u8 tbuf[28];
- u8 i;
- for(i=0;i<28;i++)tbuf[i]=0;//��0
- tbuf[0]=(aacx>>8)&0XFF;
- tbuf[1]=aacx&0XFF;
- tbuf[2]=(aacy>>8)&0XFF;
- tbuf[3]=aacy&0XFF;
- tbuf[4]=(aacz>>8)&0XFF;
- tbuf[5]=aacz&0XFF;
- tbuf[6]=(gyrox>>8)&0XFF;
- tbuf[7]=gyrox&0XFF;
- tbuf[8]=(gyroy>>8)&0XFF;
- tbuf[9]=gyroy&0XFF;
- tbuf[10]=(gyroz>>8)&0XFF;
- tbuf[11]=gyroz&0XFF;
- tbuf[18]=(roll>>8)&0XFF;
- tbuf[19]=roll&0XFF;
- tbuf[20]=(pitch>>8)&0XFF;
- tbuf[21]=pitch&0XFF;
- tbuf[22]=(yaw>>8)&0XFF;
- tbuf[23]=yaw&0XFF;
- usart1_niming_report(0XAF,tbuf,28);//�w���@ʾ��,0XAF
- }
-
-
- int main(void)
- {
- u8 t=0,report=1; //Ĭ�J(r��n)�_���ψ�(b��o)
- u8 key;
- float pitch,roll,yaw; //�W����
- short aacx,aacy,aacz; //���ٶȂ�����ԭʼ��(sh��)��(j��)
- short gyrox,gyroy,gyroz; //���݃xԭʼ��(sh��)��(j��)
- short temp; //�ض�
-
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
- delay_init(); //�ӕr(sh��)����(sh��)��ʼ��
- uart_init(500000); //���ڳ�ʼ����9600
- usmart_dev.init(72); //��ʼ��USMART
- LED_Init(); //��ʼ���cLED�B�ӵ�Ӳ���ӿ�
- KEY_Init(); //��ʼ�����I
- LCD_Init(); //��ʼ��LCD
- MPU_Init(); //��ʼ��MPU6050
- POINT_COLOR=RED; //�O(sh��)�����w��tɫ
- LCD_ShowString(30,50,200,16,16,"Wang Kai");
- LCD_ShowString(30,70,200,16,16,"MPU6050 TEST");
- LCD_ShowString(30,90,200,16,16,"HPU");
- LCD_ShowString(30,110,200,16,16,"2018/3/12");
- while(mpu_dmp_init())
- {
- LCD_ShowString(30,130,200,16,16,"MPU6050 Error");
- delay_ms(200);
- LCD_Fill(30,130,239,130+16,WHITE);
- delay_ms(200);
- }
- LCD_ShowString(30,130,200,16,16,"MPU6050 OK");
- LCD_ShowString(30,150,200,16,16,"KEY0:UPLOAD ON/OFF");
- POINT_COLOR=BLUE;//�O(sh��)�����w���{(l��n)ɫ
- LCD_ShowString(30,170,200,16,16,"UPLOAD ON ");
- LCD_ShowString(30,200,200,16,16," Temp: . C");
- LCD_ShowString(30,220,200,16,16,"Pitch: . C");
- LCD_ShowString(30,240,200,16,16," Roll: . C");
- LCD_ShowString(30,260,200,16,16," Yaw : . C");
- LCD_ShowString(30,280,200,16,16," Durriculum Design ");
- while(1)
- {
- key=KEY_Scan(0);
- if(key==KEY0_PRES)
- {
- report=!report;
- if(report)LCD_ShowString(30,170,200,16,16,"UPLOAD ON ");
- else LCD_ShowString(30,170,200,16,16,"UPLOAD OFF");
- }
- if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
- {
- temp=MPU_Get_Temperature(); //�õ��ض�ֵ
- MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //�õ����ٶȂ�������(sh��)��(j��)
- MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //�õ����݃x��(sh��)��(j��)
- if(report)mpu6050_send_data(aacx,aacy,aacz,gyrox,gyroy,gyroz);//���Զ��x���l(f��)�ͼ��ٶȺ����݃xԭʼ��(sh��)��(j��)
- if(report)usart1_report_imu(aacx,aacy,aacz,gyrox,gyroy,gyroz,(int)(roll*100),(int)(pitch*100),(int)(yaw*10));
- if((t%10)==0)
- {
- if(temp<0)
- {
- LCD_ShowChar(30+48,200,'-',16,0); //�@ʾؓ(f��)̖(h��o)
- temp=-temp; //�D(zhu��n)������(sh��)
- }else LCD_ShowChar(30+48,200,' ',16,0);//ȥ��ؓ(f��)̖(h��o)
- LCD_ShowNum(30+48+8,200,temp/100,3,16);//�@ʾ����(sh��)����
- LCD_ShowNum(30+48+40,200,temp%10,1,16);//�@ʾС��(sh��)����
- temp=pitch*10;
- if(temp<0)
- {
- LCD_ShowChar(30+48,220,'-',16,0); //�@ʾؓ(f��)̖(h��o)
- temp=-temp; //�D(zhu��n)������(sh��)
- }else LCD_ShowChar(30+48,220,' ',16,0);//ȥ��ؓ(f��)̖(h��o)
- LCD_ShowNum(30+48+8,220,temp/10,3,16); //�@ʾ����(sh��)����
- LCD_ShowNum(30+48+40,220,temp%10,1,16);//�@ʾС��(sh��)����
- temp=roll*10;
- if(temp<0)
- {
- LCD_ShowChar(30+48,240,'-',16,0); //�@ʾؓ(f��)̖(h��o)
- temp=-temp; //�D(zhu��n)������(sh��)
- }else LCD_ShowChar(30+48,240,' ',16,0);//ȥ��ؓ(f��)̖(h��o)
- LCD_ShowNum(30+48+8,240,temp/10,3,16); //�@ʾ����(sh��)����
- LCD_ShowNum(30+48+40,240,temp%10,1,16);//�@ʾ��(sh��)����
- temp=yaw*10;
- if(temp<0)
- {
- LCD_ShowChar(30+48,260,'-',16,0); //�@ʾؓ(f��)̖(h��o)
- temp=-temp; //�D(zhu��n)������(sh��)
- }else LCD_ShowChar(30+48,260,' ',16,0);//ȥ��ؓ(f��)̖(h��o)
- LCD_ShowNum(30+48+8,260,temp/10,3,16);//�@ʾ����(sh��)����
- LCD_ShowNum(30+48+40,260,temp%10,1,16);//�@ʾС��(sh��)����
- t=0;
- LED0=!LED0;//LED�W�q��
- }
- }
- t++;
- }
- }
 �A�Ǽ��ٶșz�y(c��).doc
(1.3 MB, ���d��(sh��): 35)
�A�Ǽ��ٶșz�y(c��).doc
(1.3 MB, ���d��(sh��): 35)
2018-3-19 19:51 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
|
�u(p��ng)��
-
�鿴ȫ���u(p��ng)��
|





 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664






 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��