Altium Designer畫的THB7128大功率高細分 混合式步進電機驅(qū)動模塊的電路原理圖和PCB圖如下:(51hei附件中可下載工程文件)



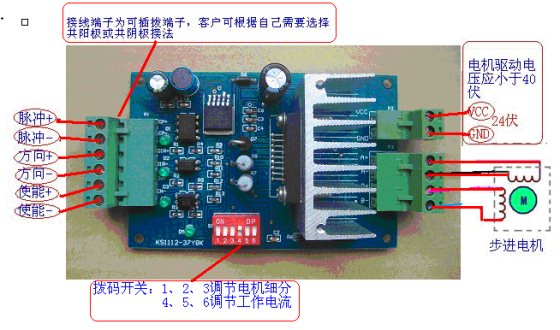
【模塊的標(biāo)注圖片】 【步進電機控制接線圖】 用戶可根據(jù)需要采用共陽極接法或者共陰極接法。 - 共陽極接法:分別將脈沖+、方向+、使能+連接在一起,連接到控制系統(tǒng)的電源上,如果此電源是+5伏,可直接接入,如果此電源大于+5伏,則需外部另加限流電阻R,保證給驅(qū)動器內(nèi)部光耦提供8—15mA的驅(qū)動電流。輸入信號低電平有效。
- 共陰極接法:分別將脈沖-、方向-、使能-,連接到控制系統(tǒng)的地端(SGND,與電源地隔離),輸入信號高電平有效。限流電阻同上
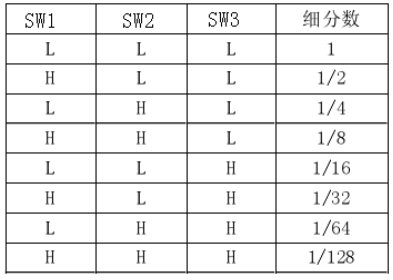
撥碼開關(guān)作用: 電機細分設(shè)定: (撥碼開關(guān)常態(tài)均為低電平,接通為高電平。) 工作電流設(shè)定:
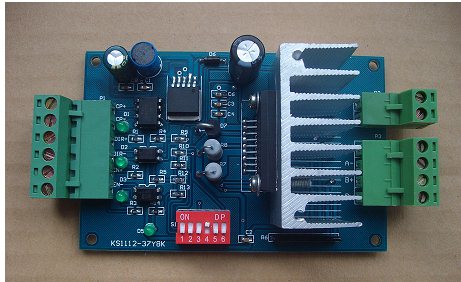
實物圖片:
關(guān)于THB7128芯片應(yīng)用注意事項
在使用THB7128過程中,有以下幾點需要注意:
1、芯片擊穿的電壓為36V(空載狀態(tài)下),電機在運行時會產(chǎn)生的感應(yīng)電動勢,電感越大、速度越快產(chǎn)生的電動勢越大。所以在選擇電源時,需要把這考慮進去,推薦最高使用32V以下電源。
2、芯片的鎖定時間設(shè)置在0.6s,也就是說,在0.6s的時間內(nèi)脈沖(CLK)沒有變化,芯片就減小VREF的值,從而達到電機在無信號的情況下低電流工作,降低芯片的功耗。改變下圖中電阻R4的大小,即可改變鎖定電流的大小。

1、OSC1為衰減時間設(shè)置,推薦100pf~470pf之間,對應(yīng)的衰減時間約10~47us。 Cosc1的大小決定了衰減時間的長短,具體調(diào)整方式:更換OSC1電容,由低向高調(diào),以電機運行平穩(wěn),噪音低、震動小時為佳。
2、在四個電機輸出端與地之間需接入電阻Rx,阻值視供電電壓而定,VM/Rx在5mA左右即可。作用是減弱毛刺對芯片的損壞。
3、在畫芯片管腳的地線時要盡可能的粗,檢測電阻和芯片之間的連線要短、粗,兩者的地線端相連也要短粗。
4、 在畫PCB時,芯片周圍的安全間距至少要15mil(0.3mm),在四個電機輸出端和電源端尤其需要注意。
5、在靠近15腳(VCC)、14腳(VM)管腳處各放置1個0.1uf的電容。
6、檢測電阻選用2512封裝的貼片或1W的金屬膜,推薦使用0.22Ω電流大小按下面公式計算:
VREF=5*Io*Rs
【簡要說明】 一、 尺寸:長100mm、寬65mm、高30mm.
二、 主要芯片:THB7128、LM2576.
三、 工作電壓:控制信號直流4.5~5.5V;最高耐壓40伏、大電流3.3A(峰值)
四、 最大工作電流:3A
五、 細分設(shè)定:1、1/2、1\4、1\8、1\16、1\32、1\64、1\128。 六、特點:
1、具有電源指示,信號輸出指示。
2、轉(zhuǎn)速可調(diào)、工作方式,工作電流均可通過撥碼開關(guān)調(diào)節(jié)
3、抗干擾能力強
4、自動半流鎖定功能
5、內(nèi)置過流保護及溫度保護 6、內(nèi)置混合式衰減模式
7、可單獨控制多種規(guī)格的兩相混合式步進電機
8、可實現(xiàn)最大功率120W步進電機
單片機源程序如下:
- ///////////////////步進電機調(diào)試程序/////////////////
- #include<reg52.h>
- #define uchar unsigned char
- #define uint unsigned int
- /********************************************************
- 控制位定義
- ********************************************************/
- sbit shi_neng=P1^0; // 使能控制位
- sbit fang_xiang=P1^1;// 旋轉(zhuǎn)方向控制位
- sbit mai_chong=P1^2; // 脈沖控制位
- sbit qi_dong=P2^0;// 啟動按鈕
- sbit ting_zhi=P2^1;//停止按鈕
- sbit zheng_zhuan=P2^2;//正轉(zhuǎn)按鈕
- sbit fan_zhuan=P2^3;// 反轉(zhuǎn)按鈕
- /********************************************************
- 延時函數(shù)
- ********************************************************/
- void delay(uint i)//延時函數(shù)
- {
- uchar j,k;
- for(j=0;j<i;j++)
- for(k=0;k<50;k++);
- }
- /********************************************************
- 主函數(shù)
- ********************************************************/
- main()
- {
- shi_neng=1; // 使能控制位
- fang_xiang=0;// 旋轉(zhuǎn)方向控制位
- mai_chong=0; // 脈沖控制位
-
- while(1)
- {
- mai_chong=~mai_chong; //輸出時鐘脈沖
- delay(5); //延時 (括號內(nèi)數(shù)值越小,電機轉(zhuǎn)動速度越快)
- if(qi_dong==0) shi_neng=0; //啟動按鈕
- if(zheng_zhuan==0) fang_xiang=0;//正轉(zhuǎn)按鈕
- if(fan_zhuan==0) fang_xiang=1;// 反轉(zhuǎn)
- if(ting_zhi==0) shi_neng=1;//停止
- }
- }
電機驅(qū)動板的全套設(shè)計資料51hei提供下載:
| 
 [復(fù)制鏈接]
[復(fù)制鏈接]