|
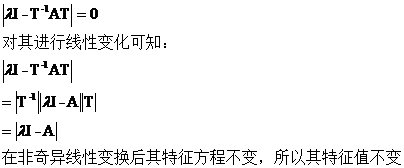
《現代控制理論》試卷 1. 淺析精準數學模型與健壯控制規律的作用及二者間的關系? 答:在自動控制的系統中,為了使我們設計的自動控制系統的穩定性和暫態性能滿足我們的要求,我們就必須要對系統的暫態過程進行定量的理論分析,以掌握其內在的控制規律。 用來描述系統各部分之間因果關系的數學表達式就是系統的數學模型,它的作用如上所述,可以將一個具體的系統根據其內部結構轉變成我們熟悉的數學表達式,不論是單輸入單輸出系統的微分方程、傳遞函數還是多輸入多輸出下的狀態方程。 而系統的控制規律,可以具體到例如穩態誤差、調節時間、超調量、可控性等這些指標,通過這些指標可以定量的描述系統在遇到擾動量后能不能按照我們的要求進行控制,控制的效果如何。 每一個確定的控制系統都可以列出不唯一的多個數學模型,在不同的數學模型中我們對系統控制規律分析的側重點不盡相同。例如在研究系統可控性時,如果一開始建模我們就準確的列出了其標準性,這就對我們之后的分析帶來了方便和快捷。并且不同類型的控制系統也有其自身適用的模型,在多輸入多輸出的系統中我們如果還利用信號流圖或者傳遞函數等模型,那么不但建模困難還可能會對系統規律的分析出現較大的偏差。綜上所述,精準的數學模型可以準確的描述控制系統的自身規律,通過對模型的分析我們可以準確掌握現有的控制規律,從而根據需要對系統進行改善,使系統更好的完成控制要求。 2. 簡述非奇異線性變換在控制系統分析中的作用? 答:在一個確定的控制系統中,我們可以選擇不同的狀態變量和不同的形式來進行描述。所以同一個控制系統可以寫出不同的矩陣,非奇異線性變換就是將原狀態矢量做線性變換,從而得出另一狀態矢量,將系統的狀態空間表達式變成新的形式。非奇異線性變換只是將描述系統的方程變化了,系統的特征值、系統本身并沒有變化,不影響其穩定性、能控能觀性。非奇異線性變換將描述系統的方程變成一種可以讓我們更直觀分析系統的形式,比如對角標準型可以讓我們直觀得到系統的穩定性,對于能控標準型和能觀標準型則可以讓我們更好的分析其能控和能觀性。 3.淺析狀態反饋與狀態觀測器在極點配置時的分離特性? 答:在許多控制系統中,我們實現解耦等問題時都要需要狀態反饋,但是許多狀態變量無法直接檢測到,狀態觀測器可以實現狀態反饋。但是在閉環系統中,極點包括直接狀態反饋系統的極點和觀測器自身的極點兩個部分,但是這二者獨立,相互分離。由觀測器構成的反饋閉環系統,只要系統能夠觀測,其狀態反饋矩陣和觀測器反饋舉證相互不影響,保持獨立,可以分別設計。這個性質稱為閉環極點設計的分離性。 4. 什么是解耦控制? 工程中一般采取什么方法? 答:在多輸入多輸出的控制系統中,每個輸入之間相互作用,每個輸出都收到各個輸入的控制,這給我們對系統的分析造成了很大困難,解耦控制就是使系統中的每一個輸出都只受單個輸入的控制。在工程中一般有兩中方法:前饋補償器解耦和狀態反饋解耦。 答:當擾動作用時,輸出量將偏離原來的穩定值,這時由于反饋的作用通過系統內部的自動調節,系統可以回到原來的穩定值穩定下來,此時系統使穩定的;當系統從一個穩態過度到另一個穩態時,都要經歷一個過渡過程,表征這個過渡過程性能的指標叫做暫態性能指標。包括超調量,上升時間,調節時間和震蕩次數等。在實際生活中只是判定穩定還不夠,我們還要知道系統到底有多穩定,此時我們考慮系統的穩定裕度是多少。 當由于內部的相互作用,使系統出現發散而處于不穩定的狀態,這時系統是不穩定的。對于任何控制系統來說,首要的條件就是系統能夠穩定。 - 線性連續系統:其穩定性只取決于系統本身的固有特性(系統結構或者是結構參數等)和擾動量或輸入量沒有關系,它取決于擾動消失后暫態分量是否會衰減。它完全決定于系統閉環傳遞函數的極點分布,若所有的極點都在s軸的負半平面則系統穩定。即:特征根決定系統的穩定性,閉環零極點決定系統的品質
1)第一個穩定判據(時域下的穩定判據,適用于低階系統):代數穩定判據,勞斯穩定判據、赫爾維茲判據等。基本原理還是以特征值的取值來判斷。以勞斯判據為例,當列出勞斯表后,根據首列的符號即可判斷其穩定性,在確定穩裕度時可以將原閉環方程中的s使用s=z-δ代替解出穩點裕度δ。 2)第二個穩定判據(適用于高階系統,有待定參數的系統):根軌跡法。根軌跡是在s平面上所有特征根的連線。在圖中可以看到所有特征根的分布,在系統的傳遞函數中有未知的參數K時,我們可以根據根軌跡的繪制規則畫出當所有K值下的所有特征值的分布,每確定一個K值,就可以等到系統的一組特征值,從而根據特征值的在s平面的分布判斷系統是否穩定。 3)第三個穩定判據(頻率特性下的穩定判據):奈式穩定判據、伯德圖對數穩定判據。奈式穩定判據是將s平面映射到復平面上。奈式曲線繞(-1,j0)點逆時針旋轉的周數N,在s平面上的開環極點個數P,閉環極點個數Z,滿足Z=P-N,則系統是穩定的。在頻域下用相位裕度和增益裕度來判斷其相對穩定性。 在伯德圖對數穩定判據:畫出波特圖后可以直觀的看出系統是否穩定和穩定裕度的大小。 4)第四個判據(常用于多輸入多輸出線性系統):李雅普諾夫穩定判據。與經典控制不同,李雅普諾夫意義下的穩定性包括四個方面:穩定、漸近穩定、大范圍漸近穩定和不穩定。李雅普諾夫第一法是間接法,這是通過狀態方程解的特征來判斷的。其穩定的充要條件是狀態方程的特征值小于等于零。而第二法則是通過構造李氏函數來判定的。一般情況下單輸入單輸出線性系統的判據較多而且也很方便快捷,只有在多輸入多輸出的時候李氏判據用的較多,李氏判據真正的優勢體現在非線性系統的判定中。 - 線性離散系統:當控制系統中的信號僅定義在離散時間上,這樣的系統稱為線性系統。其和連續系統有著相似之處,我們使用z變換來來分析其穩定性。
1)第一個判據:將s平面映射到z平面上,只要系統的特征值在z平面的單位圓內,系統穩定。使用數學關系將z變換和拉式變換轉換之后代數穩定判據同樣適用。 2)第二個判據:奈式穩定判據、伯德圖。一般情況下伯德圖用的較多 - 非線性系統:該系統的穩定性不但決定于系統的自身的特性還取決于擾動量和輸入量。一般分析非線性系統的工程方法有兩種,一是相平面法(適合一二階)二是描述函數法(適合高階)
1)第一個判據:相平面法。求出負描述函數 ,當系統線性部分的幅相特性曲線包括該函數則系統不穩定,不包圍則系統穩定。 ,當系統線性部分的幅相特性曲線包括該函數則系統不穩定,不包圍則系統穩定。 2)第二個判據:李雅普諾夫判據。在非線性系統中穩定性是相對系統的平衡態而言的,不同的平衡態有著不同的穩定性,所以只能分別討論各個平衡態附近的穩定性。上文中介紹了李氏判據的基本方法。 李氏第一法中:在非線性系統中,根據其狀態方程可以求出向量函數的雅克比矩陣,再將其線性化,此時得到的線性化方程的特征值就可以像線性系統一樣判定其大小若小于等于零時系統是穩定的。 李氏第二法中:李雅普諾夫提出,可虛構一個能量函數(后來被稱為李雅普諾夫函數),一般它與各個狀態變量x及t有關,記為V(x,t)。若不顯含t,則記為V(x)。它是一個標量函數,考慮到能量函數總是大于零,故為正定函數。能量衰減特性用), 表示。李雅普諾夫第二法利用V及 表示。李雅普諾夫第二法利用V及 的符號特征,直接對平衡狀態穩定性作出判斷,無需求出系統狀方程。具體如下:設系統的狀態方程為 的符號特征,直接對平衡狀態穩定性作出判斷,無需求出系統狀方程。具體如下:設系統的狀態方程為 ,如果存在一個標量函數)V(x)它有連續的一階偏導數,而且滿足:(1) ,如果存在一個標量函數)V(x)它有連續的一階偏導數,而且滿足:(1) V(x)是正定的;(2) 是負定的,則系統在原點處的平衡狀態是漸近穩定的。 是負定的,則系統在原點處的平衡狀態是漸近穩定的。 《現代控制理論》試卷 
1.系統的狀態空間表達式為 解: 由matlab可得: A=[0 1;-2 -3]; >> [v,d]=eig(A) v = 0.7071 -0.4472 -0.7071 0.8944 d = -1 0 0 -2 其特征值是-1和-2,特征向量是v矩陣的兩個列向量是其特征向量。 證明: 系統的特征方程是: 系統經過非奇異變換后 其特征方程是:  由matlab可得: 由matlab可得:T=[2.8284 1.4142;2.2361 2.2361]; B=[1;1]; T*B ans = 4.2426 4.4722 CT由matlab可得: C*v ans = 0.7071 -0.4472 
2.已知系統 試分析輸出能控性和狀態能控性。 解: 狀態能控: 由matlab可知: a=[-4 5;1 0]; b=[-5;1]; c=[1 -1]; M=ctrb(a,b) M = -5 25 1 -5 可知M矩陣不滿秩,所以該系統狀態不能控。 輸出能控: Rank(cb cab)=rank[-6 30]=1 該矩陣滿秩,所以該系統輸出能控 
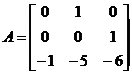
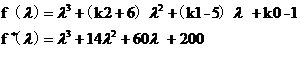
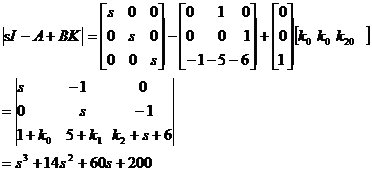
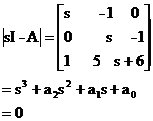
3. 若系統的狀態空間表達式為 該系統是否能觀測?若能觀測,試化為可觀測標準型。 解: 由matlab可知: a=[1 -1;0 2]; b=0; c=[-1 -0.5]; N=obsv(a,c) N = -1.0000 -0.5000 -1.0000 0 該判別矩陣滿秩,所以該系統可觀測。 其能觀標準型是: 4. 系統利用狀態反饋 ,擬將極點配置在 ,擬將極點配置在 和 和 ,模型如下: ,模型如下: 試用三種不同方法確定狀態反饋增益矩陣K。 解: 方法一:該形式已經是能控標準型,加入狀態反饋陣后的特征多項式和期望的特征多項式是: 對照可得k=[199 55 8] 方法二: 對照  可得: K=[199 55 8] 方法三: 期望的特征方程是:
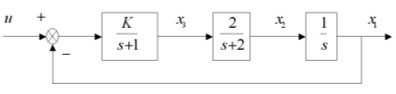
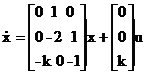
5. 試確定圖示系統中增益K的穩定范圍(應用李氏第二法)。 解:由系統框圖可得其狀態方程: 則: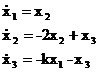 由該式可以知道(0,0)點是平衡狀態 由該式可以知道(0,0)點是平衡狀態 設半正定矩陣 由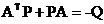 可以推出 可以推出 解出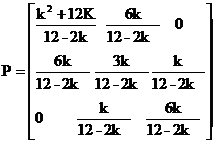 若p是正定矩陣則其一階、二階、三階主子 若p是正定矩陣則其一階、二階、三階主子 式都要大于零即:  解不等式組可以知道k>0且12-2k>0最后可以知道k的取值范圍是0<k<6
完整的Word格式文檔51黑下載地址:
 《現代控制理論》試卷.doc
(186.34 KB, 下載次數: 11)
《現代控制理論》試卷.doc
(186.34 KB, 下載次數: 11)
2017-12-28 02:31 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
| 








 ,
, 
 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

