之前的一個小項目,基于stm32f103這款單片機,實現紅外遙控,超聲波避障,黑白尋跡,pwm調速,齒輪測速等功能,這里上傳下之前的工程文件,附部分項目筆記,希望對需要的人有幫助,有不對的地方還請指出來,謝謝!
下面是設計報告的內容節選(清晰圖片版請下載附件)
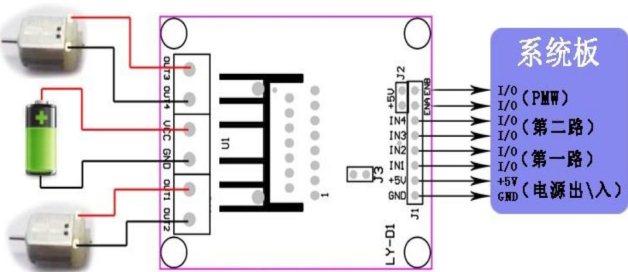
項目設計:智能小車1、項目簡介本次項目中我們利用SMART103平臺中的硬件資源控制電機驅動、紅外遙控模塊從而實現對小車的前進,后退,左右轉彎以及速度調整,并能夠持續加減速。速度狀態通過LED指示狀態來識別。通過此次項目,可以掌握電機驅動模塊跟紅外遙控模塊的使用、I/O口作為輸出模式時,CPU對I/O口的基本操作和控制,系統滴答定時器的工作原理、高級定時器TIM1的PWM調制原理、以及紅外遙控器的工作原理、對系統工作有個整體認識。 2、電機驅動模塊 接口說明: 輸出口:OUT1、OUT2、OUT3、OUT4 四路輸出口分別對應小車左右兩側的電機;其中1、2為一組,對應左側電機的正負極;3、4位一組,對應右側電機的正負極,在安裝電機之前對電機正負極進行檢測。 輸入口:ENA、IN1、IN2、IN3、IN4、ENB ENA、ENB為電機控制使能端口,改口接入PWM波可以根據波形占空比調節電機轉速IN1、IN2、IN3、IN4 分別對應單片機IO口,用來控制電機正反轉。 電源輸入:12V輸入、GND 12V接入電源正極,GND接入電源負極,供電機驅動模塊正常驅動電機,該模塊自帶5V板載輸出。 原理圖: 圖中假定IN1、IN2分別對應輸入1、0;電流流經方向為黃色熒光筆軌跡,驅動電路一側電機電機正傳,反之輸入0、1電機反轉;同樣電路另一側原理相同。 MOTO_GPIO初始化:General Purpose Input Output (通用輸入/輸出)簡稱為GPIO,或總線擴展器,利用工業標準I2C、SMBus或SPI接口簡化了I/O口的擴展。當微控制器或芯片組沒有足夠的I/O端口,或當系統需要采用遠端串行通信或控制時,GPIO產品能夠提供額外的控制和監視功能。 在STM32中,每個GPI/O端口有兩個32位配置寄存器(GPIOx_CRL,GPIOx_CRH),兩個32位數據寄存器(GPIOx_IDR和GPIOx_ODR),一個32位置位/復位寄存器(GPIOx_BSRR),一個16位復位寄存器(GPIOx_BRR)和一個32位鎖定寄存器(GPIOx_LCKR)。 根據數據手冊中列出的每個I/O端口的特定硬件特征,GPIO端口的每個位可以由軟件分別配置成如下8中工作模式:
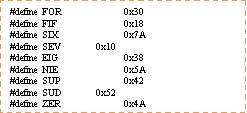
- 輸入浮空 GPIO_Mode_IN_FLOATING = 0x04,
- 輸入上拉 GPIO_Mode_IPU = 0x48,
- 輸入下拉 GPIO_Mode_IPD = 0x28,
- 模擬輸入 GPIO_Mode_AIN = 0x0,
- 開漏輸出 GPIO_Mode_Out_OD = 0x14,
- 推挽輸出 GPIO_Mode_Out_PP = 0x10,
- 推挽式復用功能 GPIO_Mode_AF_PP = 0x18
- 開漏式復用功能 GPIO_Mode_AF_OD = 0x1C,
STM32的GPIO端口位配置表如下圖所示: 
STM32的輸出模式配置如下表所示: 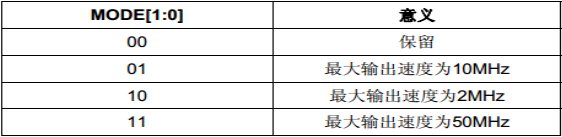
下面編寫電機驅動模塊IO初始化函數: 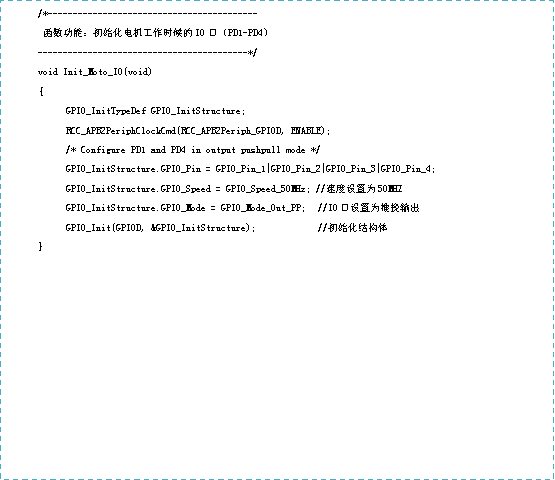  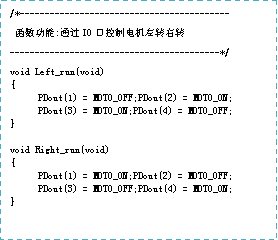 Init_PWM_GPIO初始化脈沖寬度調制(PWM),是英文“ Pulse Width Modulation” 的縮寫,簡稱脈寬調制,是利用微處理器的數字輸出來對模擬電路進行控制的一種非常有效的技術。簡單一點,就是對脈沖寬度的控制, PWM 原理如圖: 
圖中,我們假定定時器工作在向上計數 PWM模式,且當 CNT<CCRx 時,輸出 0,當 CNT>=CCRx 時輸出 1。那么就可以得到如上的 PWM示意圖:當 CNT 值小于CCRx 的時候, IO 輸出低電平(0),當 CNT 值大于等于 CCRx 的時候,IO 輸出高電平(1),當 CNT 達到 ARR 值的時候,重新歸零,然后重新向上計數,依次循環。改變 CCRx 的值,就可以改變 PWM 輸出的占空比,改變 ARR 的值,就可以改變 PWM 輸出的
頻率,這就是 PWM 輸出的原理。 STM3內部PWM波產生原理: 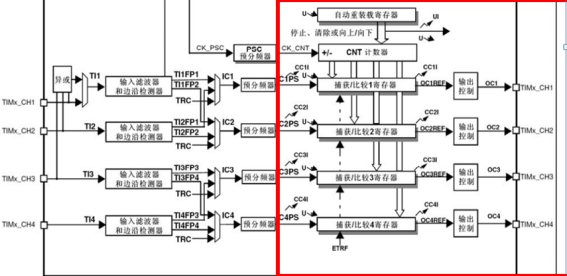
PWM產生的流程: - 使能定時器TIM1(高級定時器1)和相關IO口時鐘。使能定時器1時鐘:RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
使能GPIOF時鐘:RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); - 初始化IO口為復用功能輸出。函數:GPIO_Init();
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //復用功GPIOA8,GPIO9復用映射到定時器TIM1 - 初始化定時器:ARR,PSC等:TIM_TimeBaseInit();
- 初始化輸出比較參數:TIM_OC1Init();TIM_OC2Init();
- 使能預裝載寄存器:TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);
使能預裝載寄存器:TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable); - 使能自動重裝載的預裝載寄存器允許位TIM_ARRPreloadConfig(TIM1,ENABLE);
- 使能定時器,TIM_Cmd(TIM1,ENABLE);
- 不斷改變比較值CCRx,達到不同的占空比效果:TIM_SetCompare1();
 3、紅外遙控模塊
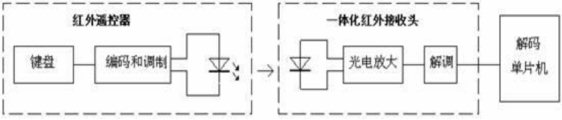
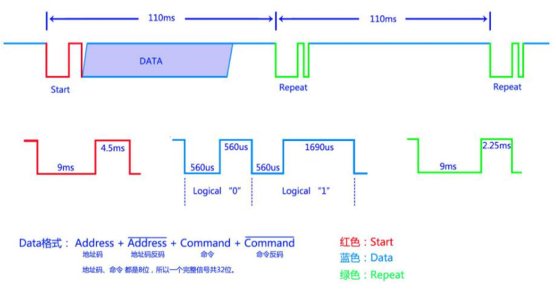
一個通用的紅外遙控系統由發射和接收兩大部分組成,如圖 編碼格式: 目前廣泛使用較普遍的兩種:一種是NEC Protocol 的PWM( 脈沖寬度調制) 標準;另一種是Philips RC-5 Protocol 的PPM( 脈沖位置調制) 標準。 NEC 標準(代表芯片WD6122):遙控載波的頻率為38kHz( 占空比為1:3) ;當某個按鍵按下時,系統首先發射一個完整的全碼,然后經延時再發射一系列簡碼,直到按鍵松開即停止發射。NTC編碼,引導碼由一個9ms的載波波形和4.5ms的關斷時間構成,它作為隨后發射的碼的引導,這樣當接收系統是微處理器構成的時候,能更有效地處理碼的接收與檢測及其它各項控制之間的時序關系。編碼采用脈沖位置調制方式(PPM) 紅外NEC協議編碼利用脈沖之間的時間間隔來區分“0”和“1”:數據0 可用“高電平0.56ms +低電平0.56ms”表示,數據1 可用“高電平0.56ms +低電平1.68ms”表示。當一個鍵按下超過36ms,振蕩器使芯片激活,將發射一組108ms的編碼脈沖,這110ms發射代碼由一個引導碼(9ms),一個結果碼(4.5ms),8位地址碼,8位地址反碼,8位數據碼和這8位數據的反碼組成。如果鍵按下超過110ms仍未松開,接下來發射的代碼(連發碼)將僅由起始碼(9ms)和結束碼(2.25ms)組成。 編碼構成: 
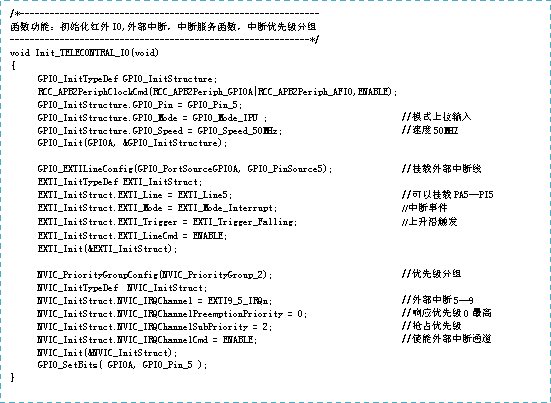
Init_TELECONTRAL_IO初始化紅外遙控初始化流程:
- 初始化 GPIO_Pin_5并打開IO時鐘使能,打開復用時鐘,模式上 拉輸入,速度50MHZ。
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO,ENABLE); - 將GPIO_Pin_5的外部中斷掛載到外部中斷線上。
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource5); - 初始化外部中斷EXTI_Init(&EXTI_InitStruct);
- 設置優先級分組NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
- 設置搶占優先級,響應優先級, NVIC_Init(&NVIC_InitStruct);
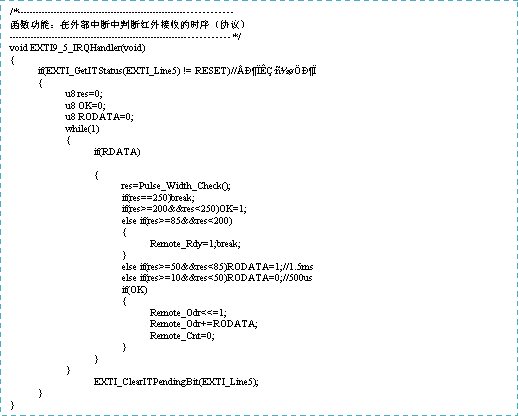
- 在中斷服務函數中判斷紅外按鍵的狀態;
- 通過命令解析函數獲取當前按鍵的指令狀態int Remote_Process(void);
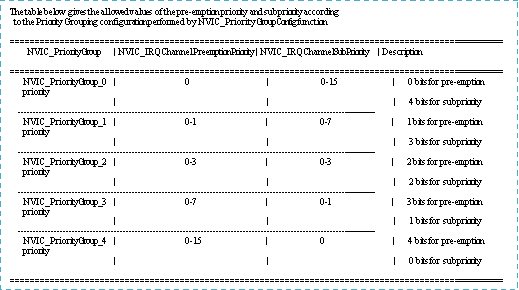
中斷優先級分組
Control_Init紅外遙控按鍵值獲取:
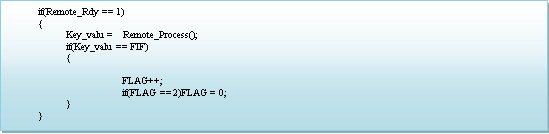
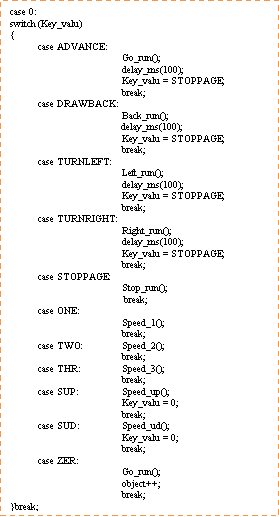
通過獲取到的按鍵值,編寫小車控制的程序,并設置模式標志位,切換模式完成小車的前進、后退、左轉、右轉、停止、加減速等功能。同時將當前獲取到的速度值跟小車的模式狀態顯示到LCD1602上面。 設置按鍵模式 :判斷當前按鍵5是否被按下,在模式一與模式二之間進行切換。
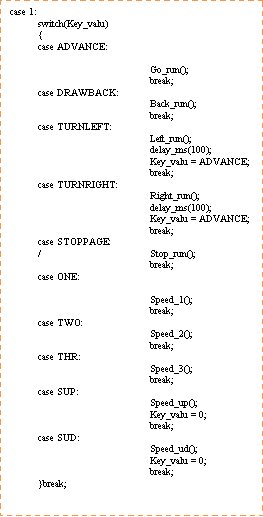
編寫兩種模式下的控制函數:
單片機源程序如下(主程序):
- #include <stdio.h>
- #include "moto.h"
- #include "delay.h"
- #include "trail.h"
- #include "range.h"
- #include "timer3.h"
- #include "lcd1602.h"
- #include "telecontral.h"
- #include "speed.h"
- #include "pid.h"
- extern u16 Cnt_10ms;
- extern unsigned int object; //超聲波避障
- extern unsigned int trail; //尋跡模式
- int main(void)
- {
- Init_Moto_IO(); //電機驅動IO初始化
- Init_PWM_GPIO(); //定時器1兩路PWM波
- Init_Trail_IO(); //尋跡模塊
- LCD_Init(); //LCD1602初始化
- Range_Init();
- Init_TELECONTRAL_IO(); //紅外遙控初始化
- TIM3_Configuration(); //定時器3初始化
- Init_TIM1_BaseInit(100,100);
- delay_init();
-
- Init_Speed_IO(); //初始化測速模塊的IO
- TIM4_Configuration(); //測速模塊用到了定時器4
- Init_PID(); //PID速度
-
- while(1)
- {
- if(Cnt_10ms >= 10)
- {
- Cnt_10ms = 0;
- UltrasonicWave1_StartMeasure();
- Stop_run();
- if(object == 1) //避障模式用到超聲波
- {
- Test(); //避障0 //按鍵0觸發避障模式
- }
- }
- if(trail == 1)
- {
- Trail(); //尋跡8 //按鍵8觸發尋跡模式
- }
- Show_Current_Speed();
- Control_Init();
- // Pid_Test();
-
- }
- }

0.jpg (10.08 KB, 下載次數: 127)
下載附件
2017-12-18 23:44 上傳
所有資料51hei提供下載(內含完整源碼與word格式清晰版的設計論文):
 Smartcar.rar
(2.06 MB, 下載次數: 321)
Smartcar.rar
(2.06 MB, 下載次數: 321)
2017-12-18 23:47 上傳
點擊文件名下載附件
智能小車項目工程 下載積分: 黑幣 -5
| 



 [復制鏈接]
[復制鏈接]







 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩


