日志
串口應用實例
#include <reg52.h>
bit flagOnceTxd = 0; //單次發送完成標志,即發送完一個字節
bit cmdArrived = 0; //命令到達標志,即接收到上位機下發的命令
unsigned char cntRxd = 0;
unsigned char pdata bufRxd[40]; //串口接收緩沖區
extern bit flagBuzzOn;
extern void LcdShowStr(unsigned char x, unsigned char y, const unsigned char *str);
extern void LcdAreaClear(unsigned char x, unsigned char y, unsigned char len);
void ConfigUART(unsigned int baud) //串口配置函數,baud為波特率
{
SCON = 0x50; //配置串口為模式1
TMOD &= 0x0F; //清零T1的控制位
TMOD |= 0x20; //配置T1為模式2
TH1 = 256 - (11059200/12/32) / baud; //計算T1重載值
TL1 = TH1; //初值等于重載值
ET1 = 0; //禁止T1中斷
ES = 1; //使能串口中斷
TR1 = 1; //啟動T1
}
unsigned char UartRead(unsigned char *buf, unsigned char len) //串口數據讀取函數,數據接收指針buf,讀取數據長度len,返回值為實際讀取到的數據長度
{
unsigned char i;
if (len > cntRxd) //讀取長度大于接收到的數據長度時,
{
len = cntRxd; //讀取長度設置為實際接收到的數據長度
}
for (i=0; i<len; i++) //拷貝接收到的數據
{
*buf = bufRxd[ i];
buf++;
}
cntRxd = 0; //清零接收計數器
return len; //返回實際讀取長度
}
void UartWrite(unsigned char *buf, unsigned char len) //串口數據寫入函數,即串口發送函數,待發送數據指針buf,數據長度len
{
while (len--)
{
flagOnceTxd = 0;
SBUF = *buf;
buf++;
while (!flagOnceTxd);
}
}
bit CmdCompare(unsigned char *buf, const unsigned char *cmd) //命令比較函數,緩沖區數據與指定命令比較,相同返回1,不同返回0
{
while (*cmd != '\0')
{
if (*cmd != *buf) //遇到不相同字符時即刻返回0
{
return 0;
}
else //當前字符相等時,指針遞增準備比較下一字符
{
cmd++;
buf++;
}
}
return 1; //到命令字符串結束時字符都相等則返回1
}
void UartDriver() //串口驅動函數,檢測接收到的命令并執行相應動作
{
unsigned char i;
unsigned char len;
unsigned char buf[30];
const unsigned char code cmd0[] = "buzz on";
const unsigned char code cmd1[] = "buzz off";
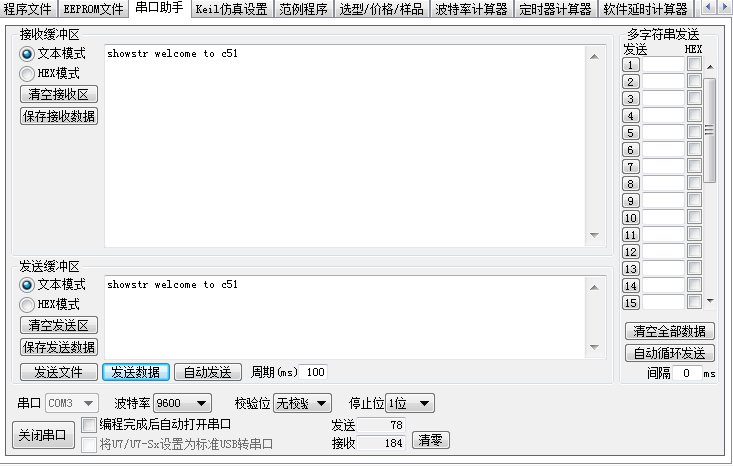
const unsigned char code cmd2[] = "showstr ";
const unsigned char code *cmdList[] = {cmd0, cmd1, cmd2};
if (cmdArrived) //有命令到達時,讀取處理該命令
{
cmdArrived = 0;
for (i=0; i<sizeof(buf); i++) //清零命令接收緩沖區
{
buf[ i] = 0;
}
len = UartRead(buf, sizeof(buf)); //將接收到的命令讀取到緩沖區中
for (i=0; i<sizeof(cmdList)/sizeof(cmdList[0]); i++) //與所支持的命令列表逐一進行比較
{
if (CmdCompare(buf, cmdList[ i]) == 1) //檢測到相符命令時退出循環,此時的i值就是該命令在列表中的下標值
{
break;
}
}
switch (i) //根據比較結果執行相應命令
{
case 0:
flagBuzzOn = 1; //開啟蜂鳴器
break;
case 1:
flagBuzzOn = 0; //關閉蜂鳴器
break;
case 2:
buf[len] = '\0'; //為接收到的字符串添加結束符
i = sizeof(cmd2) - 1;
LcdShowStr(0, 0, buf+i); //顯示字符串
i = len - i; //計算有效字符個數
if (i < 16) //有效字符少于16時,清楚液晶上的后續字符位
{
LcdAreaClear(i, 0, 16-i);
}
break;
default: //i大于命令列表最大下標時,即表示沒有相符的命令,給上機發送“錯誤命令”的提示
UartWrite("bad command.\r\n", sizeof("bad command.\r\n")-1);
return;
}
buf[len++] = '\r'; //有效命令被執行后,在原命令幀之后添加回車換行符后返回給上位機,表示已執行
buf[len++] = '\n';
UartWrite(buf, len);
}
}
void UartRxMonitor(unsigned char ms) //串口接收監控函數
{
static unsigned char cntbkp = 0;
static unsigned char idletmr = 0;
if (cntRxd > 0) //接收計數器大于零時,監控總線空閑時間
{
if (cntbkp != cntRxd) //接收計數器改變,即剛接收到數據時,清零空閑計時
{
cntbkp = cntRxd;
idletmr = 0;
}
else
{
if (idletmr < 30) //接收計數器未改變,即總線空閑時,累積空閑時間
{
idletmr += ms;
if (idletmr >= 30) //空閑時間超過30ms即認為一幀命令接收完畢
{
cmdArrived = 1; //設置命令到達標志
}
}
}
}
else
{
cntbkp = 0;
}
}
void InterruptUART() interrupt 4 //UART中斷服務函數
{
if (RI) //接收到字節
{
RI = 0; //手動清零接收中斷標志位
if (cntRxd < sizeof(bufRxd)) //接收緩沖區尚未用完時,
{
bufRxd[cntRxd++] = SBUF; //保存接收字節,并遞增計數器
}
}
if (TI) //字節發送完畢
{
TI = 0; //手動清零發送中斷標志位
flagOnceTxd = 1; //設置單次發送完成標志
}
}
void LcdInit() //液晶初始化函數
{
LcdWriteCmd(0x38); //16*2顯示,5*7點陣,8位數據接口
LcdWriteCmd(0x0C); //顯示器開,光標關閉
LcdWriteCmd(0x06); //文字不動,地址自動+1
LcdWriteCmd(0x01); //清屏
}
bit flagOnceTxd = 0; //單次發送完成標志,即發送完一個字節
bit cmdArrived = 0; //命令到達標志,即接收到上位機下發的命令
unsigned char cntRxd = 0;
unsigned char pdata bufRxd[40]; //串口接收緩沖區
extern bit flagBuzzOn;
extern void LcdShowStr(unsigned char x, unsigned char y, const unsigned char *str);
extern void LcdAreaClear(unsigned char x, unsigned char y, unsigned char len);
void ConfigUART(unsigned int baud) //串口配置函數,baud為波特率
{
SCON = 0x50; //配置串口為模式1
TMOD &= 0x0F; //清零T1的控制位
TMOD |= 0x20; //配置T1為模式2
TH1 = 256 - (11059200/12/32) / baud; //計算T1重載值
TL1 = TH1; //初值等于重載值
ET1 = 0; //禁止T1中斷
ES = 1; //使能串口中斷
TR1 = 1; //啟動T1
}
unsigned char UartRead(unsigned char *buf, unsigned char len) //串口數據讀取函數,數據接收指針buf,讀取數據長度len,返回值為實際讀取到的數據長度
{
unsigned char i;
if (len > cntRxd) //讀取長度大于接收到的數據長度時,
{
len = cntRxd; //讀取長度設置為實際接收到的數據長度
}
for (i=0; i<len; i++) //拷貝接收到的數據
{
*buf = bufRxd[ i];
buf++;
}
cntRxd = 0; //清零接收計數器
return len; //返回實際讀取長度
}
void UartWrite(unsigned char *buf, unsigned char len) //串口數據寫入函數,即串口發送函數,待發送數據指針buf,數據長度len
{
while (len--)
{
flagOnceTxd = 0;
SBUF = *buf;
buf++;
while (!flagOnceTxd);
}
}
bit CmdCompare(unsigned char *buf, const unsigned char *cmd) //命令比較函數,緩沖區數據與指定命令比較,相同返回1,不同返回0
{
while (*cmd != '\0')
{
if (*cmd != *buf) //遇到不相同字符時即刻返回0
{
return 0;
}
else //當前字符相等時,指針遞增準備比較下一字符
{
cmd++;
buf++;
}
}
return 1; //到命令字符串結束時字符都相等則返回1
}
void UartDriver() //串口驅動函數,檢測接收到的命令并執行相應動作
{
unsigned char i;
unsigned char len;
unsigned char buf[30];
const unsigned char code cmd0[] = "buzz on";
const unsigned char code cmd1[] = "buzz off";
const unsigned char code cmd2[] = "showstr ";
const unsigned char code *cmdList[] = {cmd0, cmd1, cmd2};
if (cmdArrived) //有命令到達時,讀取處理該命令
{
cmdArrived = 0;
for (i=0; i<sizeof(buf); i++) //清零命令接收緩沖區
{
buf[ i] = 0;
}
len = UartRead(buf, sizeof(buf)); //將接收到的命令讀取到緩沖區中
for (i=0; i<sizeof(cmdList)/sizeof(cmdList[0]); i++) //與所支持的命令列表逐一進行比較
{
if (CmdCompare(buf, cmdList[ i]) == 1) //檢測到相符命令時退出循環,此時的i值就是該命令在列表中的下標值
{
break;
}
}
switch (i) //根據比較結果執行相應命令
{
case 0:
flagBuzzOn = 1; //開啟蜂鳴器
break;
case 1:
flagBuzzOn = 0; //關閉蜂鳴器
break;
case 2:
buf[len] = '\0'; //為接收到的字符串添加結束符
i = sizeof(cmd2) - 1;
LcdShowStr(0, 0, buf+i); //顯示字符串
i = len - i; //計算有效字符個數
if (i < 16) //有效字符少于16時,清楚液晶上的后續字符位
{
LcdAreaClear(i, 0, 16-i);
}
break;
default: //i大于命令列表最大下標時,即表示沒有相符的命令,給上機發送“錯誤命令”的提示
UartWrite("bad command.\r\n", sizeof("bad command.\r\n")-1);
return;
}
buf[len++] = '\r'; //有效命令被執行后,在原命令幀之后添加回車換行符后返回給上位機,表示已執行
buf[len++] = '\n';
UartWrite(buf, len);
}
}
void UartRxMonitor(unsigned char ms) //串口接收監控函數
{
static unsigned char cntbkp = 0;
static unsigned char idletmr = 0;
if (cntRxd > 0) //接收計數器大于零時,監控總線空閑時間
{
if (cntbkp != cntRxd) //接收計數器改變,即剛接收到數據時,清零空閑計時
{
cntbkp = cntRxd;
idletmr = 0;
}
else
{
if (idletmr < 30) //接收計數器未改變,即總線空閑時,累積空閑時間
{
idletmr += ms;
if (idletmr >= 30) //空閑時間超過30ms即認為一幀命令接收完畢
{
cmdArrived = 1; //設置命令到達標志
}
}
}
}
else
{
cntbkp = 0;
}
}
void InterruptUART() interrupt 4 //UART中斷服務函數
{
if (RI) //接收到字節
{
RI = 0; //手動清零接收中斷標志位
if (cntRxd < sizeof(bufRxd)) //接收緩沖區尚未用完時,
{
bufRxd[cntRxd++] = SBUF; //保存接收字節,并遞增計數器
}
}
if (TI) //字節發送完畢
{
TI = 0; //手動清零發送中斷標志位
flagOnceTxd = 1; //設置單次發送完成標志
}
}
/*************************main.c文件程序源代碼**************************/
#include <reg52.h>
sbit BUZZ = P1^6; //蜂鳴器控制引腳
bit flagBuzzOn = 0; //蜂鳴器啟動標志
unsigned char T0RH = 0; //T0重載值的高字節
unsigned char T0RL = 0; //T0重載值的低字節
void ConfigTimer0(unsigned int ms);
extern void LcdInit();
extern void ConfigUART(unsigned int baud);
extern void UartRxMonitor(unsigned char ms);
extern void UartDriver();
void main ()
{
EA = 1; //開總中斷
ConfigTimer0(1); //配置T0定時1ms
ConfigUART(9600); //配置波特率為9600
LcdInit(); //初始化液晶
while(1)
{
UartDriver();
}
}
void ConfigTimer0(unsigned int ms) //T0配置函數
{
unsigned long tmp;
tmp = 11059200 / 12; //定時器計數頻率
tmp = (tmp * ms) / 1000; //計算所需的計數值
tmp = 65536 - tmp; //計算定時器重載值
tmp = tmp + 18; //修正中斷響應延時造成的誤差
T0RH = (unsigned char)(tmp >> 8); //定時器重載值拆分為高低字節
T0RL = (unsigned char)tmp;
TMOD &= 0xF0; //清零T0的控制位
TMOD |= 0x01; //配置T0為模式1
TH0 = T0RH; //加載T0重載值
TL0 = T0RL;
ET0 = 1; //使能T0中斷
TR0 = 1; //啟動T0
}
void InterruptTimer0() interrupt 1 //T0中斷服務函數
{
TH0 = T0RH; //定時器重新加載重載值
TL0 = T0RL;
if (flagBuzzOn) //執行蜂鳴器鳴叫或關閉
BUZZ = ~BUZZ;
else
BUZZ = 1;
UartRxMonitor(1); //串口接收監控
}
/***********************lcd1602.c文件程序源代碼*************************/
#include <reg52.h>
#define LCD1602_DB P0
sbit LCD1602_RS = P1^0;
sbit LCD1602_RW = P1^1;
sbit LCD1602_E = P1^5;
void LcdWaitReady() //等待液晶準備好
{
unsigned char sta;
LCD1602_DB = 0xFF;
LCD1602_RS = 0;
LCD1602_RW = 1;
do
{
LCD1602_E = 1;
sta = LCD1602_DB; //讀取狀態字
LCD1602_E = 0;
} while (sta & 0x80); //bit7等于1表示液晶正忙,重復檢測直到其等于0為止
}
void LcdWriteCmd(unsigned char cmd) //寫入命令函數
{
LcdWaitReady();
LCD1602_RS = 0;
LCD1602_RW = 0;
LCD1602_E = 1;
LCD1602_DB = cmd;
LCD1602_E = 0;
}
void LcdWriteDat(unsigned char dat) //寫入數據函數
{
LcdWaitReady();
LCD1602_RS = 1;
LCD1602_RW = 0;
LCD1602_DB = dat;
LCD1602_E = 1;
LCD1602_E = 0;
}
void LcdShowStr(unsigned char x, unsigned char y, const unsigned char *str) //顯示字符串,屏幕起始坐標(x,y),字符串指針str
{
unsigned char addr;
//由輸入的顯示坐標計算顯示RAM的地址
if (y == 0)
addr = 0x00 + x; //第一行字符地址從0x00起始
else
addr = 0x40 + x; //第二行字符地址從0x40起始
//由起始顯示RAM地址連續寫入字符串
LcdWriteCmd(addr | 0x80); //寫入起始地址
while (*str != '\0') //連續寫入字符串數據,直到檢測到結束符
{
LcdWriteDat(*str);
str++;
}
}
void LcdAreaClear(unsigned char x, unsigned char y, unsigned char len) //區域清除,清除從(x,y)坐標起始的len個字符位
{
unsigned char addr;
//由輸入的顯示坐標計算顯示RAM的地址
if (y == 0)
addr = 0x00 + x; //第一行字符地址從0x00起始
else
addr = 0x40 + x; //第二行字符地址從0x40起始
//由起始顯示RAM地址連續寫入字符串
LcdWriteCmd(addr | 0x80); //寫入起始地址
while (len--) //連續寫入空格
{
LcdWriteDat(' ');
}
}
#include <reg52.h>
sbit BUZZ = P1^6; //蜂鳴器控制引腳
bit flagBuzzOn = 0; //蜂鳴器啟動標志
unsigned char T0RH = 0; //T0重載值的高字節
unsigned char T0RL = 0; //T0重載值的低字節
void ConfigTimer0(unsigned int ms);
extern void LcdInit();
extern void ConfigUART(unsigned int baud);
extern void UartRxMonitor(unsigned char ms);
extern void UartDriver();
void main ()
{
EA = 1; //開總中斷
ConfigTimer0(1); //配置T0定時1ms
ConfigUART(9600); //配置波特率為9600
LcdInit(); //初始化液晶
while(1)
{
UartDriver();
}
}
void ConfigTimer0(unsigned int ms) //T0配置函數
{
unsigned long tmp;
tmp = 11059200 / 12; //定時器計數頻率
tmp = (tmp * ms) / 1000; //計算所需的計數值
tmp = 65536 - tmp; //計算定時器重載值
tmp = tmp + 18; //修正中斷響應延時造成的誤差
T0RH = (unsigned char)(tmp >> 8); //定時器重載值拆分為高低字節
T0RL = (unsigned char)tmp;
TMOD &= 0xF0; //清零T0的控制位
TMOD |= 0x01; //配置T0為模式1
TH0 = T0RH; //加載T0重載值
TL0 = T0RL;
ET0 = 1; //使能T0中斷
TR0 = 1; //啟動T0
}
void InterruptTimer0() interrupt 1 //T0中斷服務函數
{
TH0 = T0RH; //定時器重新加載重載值
TL0 = T0RL;
if (flagBuzzOn) //執行蜂鳴器鳴叫或關閉
BUZZ = ~BUZZ;
else
BUZZ = 1;
UartRxMonitor(1); //串口接收監控
}
/***********************lcd1602.c文件程序源代碼*************************/
#include <reg52.h>
#define LCD1602_DB P0
sbit LCD1602_RS = P1^0;
sbit LCD1602_RW = P1^1;
sbit LCD1602_E = P1^5;
void LcdWaitReady() //等待液晶準備好
{
unsigned char sta;
LCD1602_DB = 0xFF;
LCD1602_RS = 0;
LCD1602_RW = 1;
do
{
LCD1602_E = 1;
sta = LCD1602_DB; //讀取狀態字
LCD1602_E = 0;
} while (sta & 0x80); //bit7等于1表示液晶正忙,重復檢測直到其等于0為止
}
void LcdWriteCmd(unsigned char cmd) //寫入命令函數
{
LcdWaitReady();
LCD1602_RS = 0;
LCD1602_RW = 0;
LCD1602_E = 1;
LCD1602_DB = cmd;
LCD1602_E = 0;
}
void LcdWriteDat(unsigned char dat) //寫入數據函數
{
LcdWaitReady();
LCD1602_RS = 1;
LCD1602_RW = 0;
LCD1602_DB = dat;
LCD1602_E = 1;
LCD1602_E = 0;
}
void LcdShowStr(unsigned char x, unsigned char y, const unsigned char *str) //顯示字符串,屏幕起始坐標(x,y),字符串指針str
{
unsigned char addr;
//由輸入的顯示坐標計算顯示RAM的地址
if (y == 0)
addr = 0x00 + x; //第一行字符地址從0x00起始
else
addr = 0x40 + x; //第二行字符地址從0x40起始
//由起始顯示RAM地址連續寫入字符串
LcdWriteCmd(addr | 0x80); //寫入起始地址
while (*str != '\0') //連續寫入字符串數據,直到檢測到結束符
{
LcdWriteDat(*str);
str++;
}
}
void LcdAreaClear(unsigned char x, unsigned char y, unsigned char len) //區域清除,清除從(x,y)坐標起始的len個字符位
{
unsigned char addr;
//由輸入的顯示坐標計算顯示RAM的地址
if (y == 0)
addr = 0x00 + x; //第一行字符地址從0x00起始
else
addr = 0x40 + x; //第二行字符地址從0x40起始
//由起始顯示RAM地址連續寫入字符串
LcdWriteCmd(addr | 0x80); //寫入起始地址
while (len--) //連續寫入空格
{
LcdWriteDat(' ');
}
}
void LcdInit() //液晶初始化函數
{
LcdWriteCmd(0x38); //16*2顯示,5*7點陣,8位數據接口
LcdWriteCmd(0x0C); //顯示器開,光標關閉
LcdWriteCmd(0x06); //文字不動,地址自動+1
LcdWriteCmd(0x01); //清屏
}






全部作者的其他最新日志
- • EEPROM多字節讀寫
- • 讀寫EEPROM(+1寫入)
- • 檢驗24c02地址
- • 1602整屏移動
- • LCD1602靜態顯示


