
RDM6300是一款能讀125K RFID卡的模塊,我們可以利用此身份識別功能結合舵機完成門禁的設計。今天就詳細介紹其具體實現方法。
所需配件:
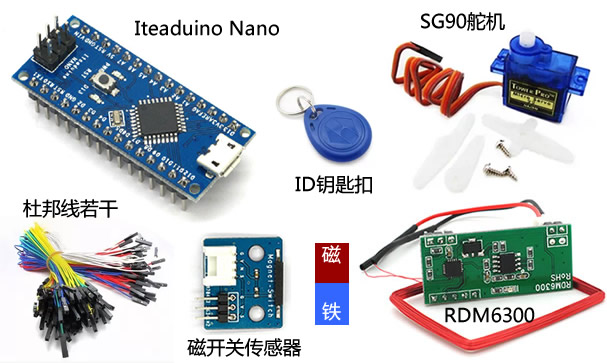
電源方面還需要一根micro數據線和一個移動電源。
步驟:
1. 讀取卡號:
Rdm6300是直接串口讀取卡信息的,包括卡號。所以取號很簡單,硬件連接如下:
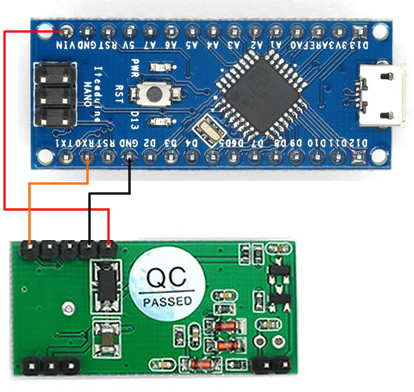
打開arduino IDE燒寫一段空程序即可使用串口監視器查看卡號:
void setup(){}
void loop(){}
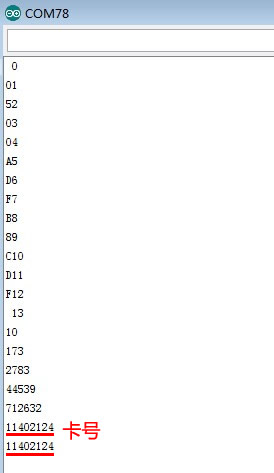
復制卡號,記下來。多張卡,就記下多個號。
2. 燒寫固件:
下面開始進入主題了!
先給Nano燒寫此次的門禁代碼,因為我們的是micro的接口,所以要用micro的USB數據線。
純代碼,無需調用庫,請給我們新來的小小工程師一點掌聲,謝謝!
當然代碼方面還可以優化,這個就交給大家來完善吧。
所需配件:
電源方面還需要一根micro數據線和一個移動電源。
步驟:
1. 讀取卡號:
Rdm6300是直接串口讀取卡信息的,包括卡號。所以取號很簡單,硬件連接如下:
打開arduino IDE燒寫一段空程序即可使用串口監視器查看卡號:
void setup(){}
void loop(){}
復制卡號,記下來。多張卡,就記下多個號。
2. 燒寫固件:
下面開始進入主題了!
先給Nano燒寫此次的門禁代碼,因為我們的是micro的接口,所以要用micro的USB數據線。
純代碼,無需調用庫,請給我們新來的小小工程師一點掌聲,謝謝!
當然代碼方面還可以優化,這個就交給大家來完善吧。
long Password1=11402124;//可識別卡號1
long Password2=7927290;//可識別卡號2
int flag=0,RX_Flag=0;//串口標志
char Code[14]; //用于存放讀到串口數據
long Num=0;//解碼數據
int serpin=7;//舵機引腳定義
int Door=0;
void Read_ID(void)
{
}
void pulse( int serpin,int angle)
{
}
void setup()
{
}
void loop()
{
//
//
//
//
//
//
//
}
邏輯設計:RDM6300識別到正確的卡號后,舵機旋轉180度開門,如果門沒被推開,磁傳感器還能感應到磁力,3秒后舵機歸位鎖門;如果讀卡成功,推門進入,磁傳感器感應不到磁力,舵機保持180度開門狀態,關上門,磁傳感器感應到磁力,延時一秒舵機歸位鎖門。
使用時需將待識別的卡號修改為自己的,可自行添加多個可識別的卡號。
3. 硬件連接:
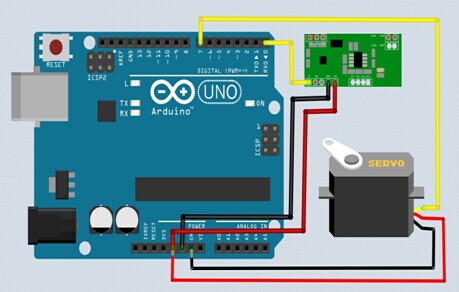
按圖鏈接主控板Iteaduino NANO和RDM6300模塊及舵機,如圖所示,用硬件串口讀取RDM6300所識別的卡號,用數字輸出腳7腳輸出PWM波控制舵機,A0取磁傳感器的值。Nano剛好有3對電源腳。
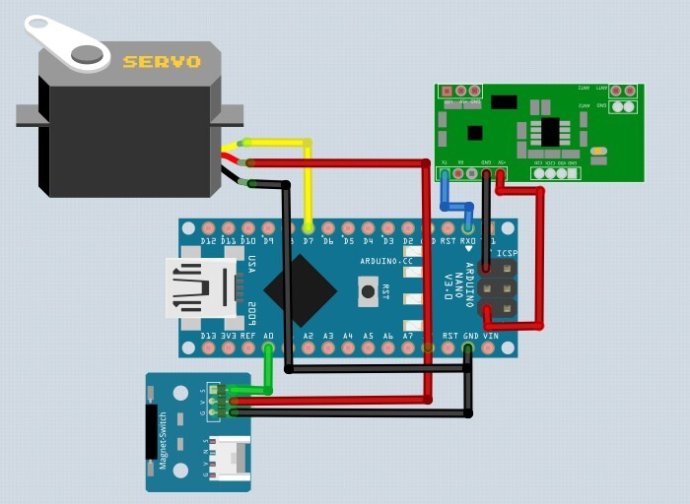
下面是uno的接線示意圖,可以不用到磁開關,看個人實際應用吧。
最終效果如圖,當然小伙伴們可以用個盒子把配件都裝起來。

相關產品資料下載:
RDM6300 ID讀卡模塊:http://pan.baidu.com/s/1kTytG7X
micro Nano資料及驅動:http://pan.baidu.com/s/1hqCDaq4
使用時需將待識別的卡號修改為自己的,可自行添加多個可識別的卡號。
3. 硬件連接:
按圖鏈接主控板Iteaduino NANO和RDM6300模塊及舵機,如圖所示,用硬件串口讀取RDM6300所識別的卡號,用數字輸出腳7腳輸出PWM波控制舵機,A0取磁傳感器的值。Nano剛好有3對電源腳。
下面是uno的接線示意圖,可以不用到磁開關,看個人實際應用吧。
最終效果如圖,當然小伙伴們可以用個盒子把配件都裝起來。
相關產品資料下載:
RDM6300 ID讀卡模塊:http://pan.baidu.com/s/1kTytG7X
micro Nano資料及驅動:http://pan.baidu.com/s/1hqCDaq4
技術討論群:272420347