應該說現在每一塊開發板都帶有紅外模塊,并且大都配置了相應的程序。但其實自己動手寫解碼程序,更能鍛煉自己所學,且不談程序寫的如何,這個過程中肯定是受益良多的。現在我就把我花一下午寫出的解碼程序與大家分享,期待高手的光臨指正。
首先,必須要了解一些基本原理。其實按下遙控器的某一個鍵,遙控器會發出一連串經過調制后的信號,這個信號經過紅外一體化模塊接收后,輸出解調后的數字脈沖,每個按鍵對應不同的脈沖,故識別出不同的脈沖就能識別出不同的按鍵。

上圖就是很常見的車載MP3遙控器,比較小巧,很好用。下面是紅外發射和接受原理:

到此讀者可能會有疑惑,那么不同的調制解調方法那么出來的脈沖規則是不一樣的?是的,的確如此。
遙控發射器專用芯片很多,根據編碼格式可以分成兩大類,這里我們以運用比較廣泛,解碼比較容易的一類來加以說明,現以日本NEC的uPD6121G組成發射電路為例說明編碼原理(一般家庭用的DVD、VCD、音響都使用這種編碼方式)。當發射器按鍵按下后,即有遙控碼發出,所按的鍵不同遙控編碼也不同。這種遙控碼具有以下特征:
采用脈寬調制的串行碼,以脈寬為0.565ms、間隔0.56ms、周期為1.125ms的組合表示二進制的“0”;以脈寬為0.565ms、間隔1.685ms、周期為2.25ms的組合表示二進制的“1”,其波形如圖所示。
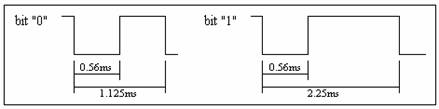
如圖可見,0與1前端的低電平持續都是0.56ms,那么就是后面的高電平持續時間不同,0為0.56ms,1為1.685ms,找到不同之處,編程時就有識別的依據了!
上述“0”和“1”組成的32位二進制碼經38kHz的載頻進行二次調制以提高發射效率,達到降低電源功耗的目的。然后再通過紅外發射二極管產生紅外線向空間發射,如圖所示。

UPD6121G產生的遙控編碼是連續的32位二進制碼組,其中前16位為用戶識別碼,能區別不同的電器設備,防止不同機種遙控碼互相干擾。該芯片的用戶識別碼固定為十六進制01H;后16位為8位操作碼(功能碼)及其反碼。UPD6121G最多額128種不同組合的編碼。
請看下圖,來自網絡:

當一個鍵按下超過36ms,振蕩器使芯片激活,將發射一組108ms的編碼脈沖,這108ms發射代碼由一個引導碼(9ms),一個結果碼(4.5ms),低8位地址碼(9ms~18ms),高8位地址碼(9ms~18ms),8位數據碼(9ms~18ms)和這8位數據的反碼(9ms~18ms)組成。如果鍵按下超過108ms仍未松開,接下來發射的代碼(連發碼)將僅由起始碼(9ms)和結束碼(2.25ms)組成。(實際上人手的動作是很慢的,即使你快速的按下按鍵,可能對于芯片來說還是超過108ms,所以如何處理連發碼是很關鍵的)
遙控器在按鍵按下后,周期性地發出同一種32位二進制碼,周期約為108ms。一組碼本身的持續時間隨它包含的二進制“0”和“1”的個數不同而不同,大約在45~63ms之間,圖為發射波形圖。


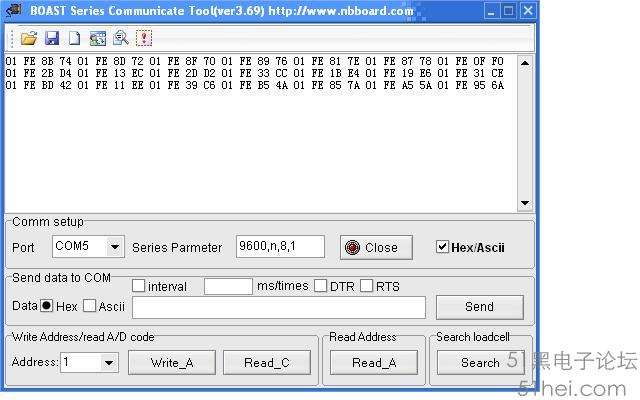
下面是我寫的代碼,按鍵編碼通過串口發送到電腦端:
由于時間關系,代碼注釋不多。
其中START_Judge()函數是判斷9ms低電平,既是判斷有無遙控信號。
BOOT_REPEATING_CODE_Judge()是判斷是引導碼還是連發碼,引導碼則進入接受數據環節,連發碼表明數據已經接受結束。
H_L_LEVEL_Judge()是接受數據時判斷高低電平。
如果亂碼,請參考:
注明:以下代碼為純軟件方式,沒有用到中斷,定時器方式,純CPU查詢,但測試結果倒也可以,至少比較穩定,得到的碼值不管對不對,都是那個值。




 [復制鏈接]
[復制鏈接]





 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩


