|
|
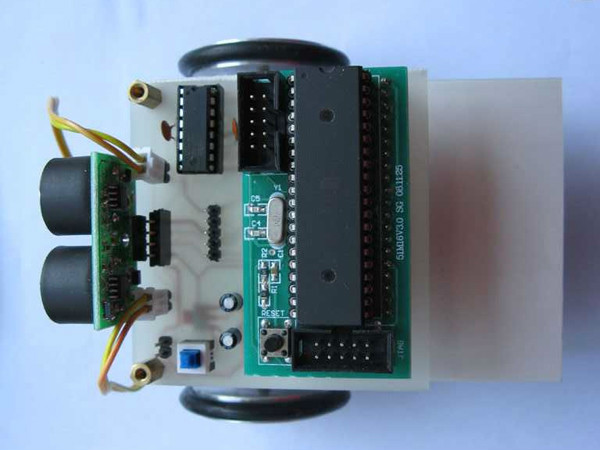
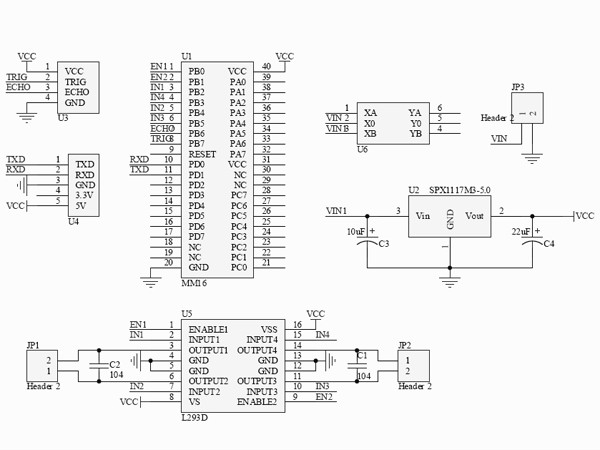
這款超聲波測(cè)距避障小車是從網(wǎng)上一論壇上看到的,總體感覺(jué)是制作簡(jiǎn)單,只用了一個(gè)超聲波測(cè)距模塊,單片機(jī)使用的是AVR M16單片機(jī),小車驅(qū)動(dòng)電路是L293D電機(jī)驅(qū)動(dòng)專用集成電路。特此整理轉(zhuǎn)發(fā),與大家一同分享。原理圖及源程序下載地址附后,需要的自己下載。這個(gè)簡(jiǎn)單的超聲波避障小車是使用一塊超聲波測(cè)距模塊進(jìn)行距離測(cè)量、障礙物的判斷,根據(jù)超聲波測(cè)距測(cè)量出來(lái)的距離來(lái)決定小車行駛方向,作者對(duì)于超聲波避障程序做了簡(jiǎn)化處理,只要有障礙物就右轉(zhuǎn)。
為了節(jié)省成本,只用了一個(gè)超聲波測(cè)距模塊,因此只能對(duì)正前方物體進(jìn)行避障。小車采用三輪結(jié)構(gòu),速度差進(jìn)行方向控制。超聲波測(cè)距模塊使用的成品模塊,單片機(jī)使用一個(gè)最小系統(tǒng)板,底板上有L293D電機(jī)驅(qū)動(dòng)模塊。實(shí)物圖如下圖。
下載:
 超聲波測(cè)距避障小車源程序、原理圖資料.rar
(499.14 KB, 下載次數(shù): 274)
超聲波測(cè)距避障小車源程序、原理圖資料.rar
(499.14 KB, 下載次數(shù): 274)
|
|

 [復(fù)制鏈接]
[復(fù)制鏈接]