��Ƭ�C(j��)��(sh��)�(y��n)ԭ�������˂�(g��)���A(ch��)��(sh��)�(y��n)
1.LED��ѭ�h(hu��n)�c(di��n)��
2.�ⲿ�Д�Ӌ(j��)��(sh��)��BCD�a�D(zhu��n)�Q
3.��λһ�w��(sh��)�a�܄�(d��ng)�B(t��i)�o�B(t��i)�@ʾ
4.����
5.�}�_�����c���ڜy��
6.���пںͮ���ͨ��
7.�ⲿRAM�U(ku��)չ
8.�����O(sh��)Ӌ(j��)�c(di��n)��ַ�
�����а���protues�����O(sh��)Ӌ(j��)���������̈D���R�����a���Լ���(sh��)�(y��n)�ĵ��w��(hu��)��
��(sh��)�(y��n)һ
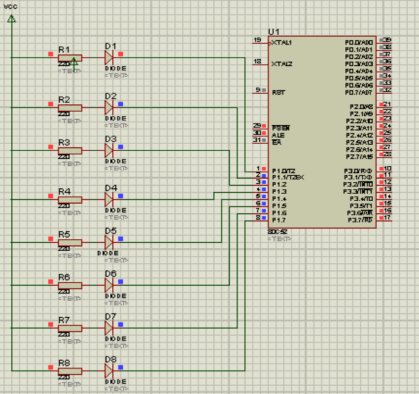
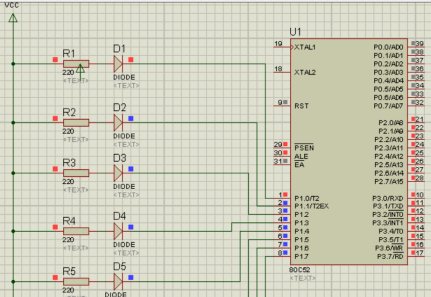
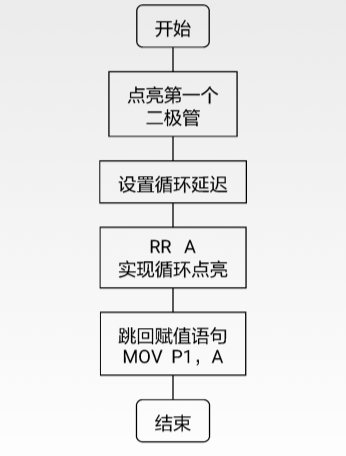
����(sh��)�(y��n)Ҫ����P1�˿ڽ�8��(g��)LED������������ѭ�h(hu��n)�c(di��n)����Ҫ����ܛ���ӕr(sh��)�������LED������r(sh��)�g�����ܾ��_��Ӌ(j��)�����ܛ���y���ӕr(sh��)�r(sh��)�g�� �D1.1.1 ����ԭ��D �D1.1.2 ����ԭ��D��(x��)��(ji��) Protues����Ĭ�J(r��n)�����ˏ�(f��)λ�·������R1-R8��������裬����ͨ���O�ܵ����O�ӵ�VCC��ؓ(f��)�O�ӵ�P0�ڣ��\(y��n)�нY(ji��)����D1-D8���Ό�(d��o)ͨ����(d��o)ͨ�r(sh��)���c(di��n)׃�t�� �D1.1.3 �������̈D ORG 0000H LJMP MAIN ORG 0100H MAIN: MOV A,#10000000B LOOP0:MOV P1,A MOV R0,#0FFH LOOP1:MOV R1,#0FFH LOOP2:NOP NOP DJNZ R1,LOOP2 DJNZ R2,LOOP1 RR A SJMP LOOP0 END
��1��number1��number2��������ʲô�� R0=number1��R1=number2���O(sh��)��ѭ�h(hu��n)�Δ�(sh��)�����У�R1��LOOP2ѭ�h(hu��n)�ĴΔ�(sh��)��R0��LOOP1ѭ�h(hu��n)�ĴΔ�(sh��)�� ��2���������ɴ�׃��֮�g�����t�r(sh��)�g�Ƕ��٣���ο��ƣ����Ӌ(j��)�㣿 R1��LOOP2ѭ�h(hu��n)�ĴΔ�(sh��)����t1=255*2=510us��R0��LOOP1ѭ�h(hu��n)�ĴΔ�(sh��)��t2=255*2*255=130050us�����Կ������t�r(sh��)�g��T=t1+t2=130560us�� �������t�r(sh��)�g��ͨ�^����ѭ�h(hu��n)�Δ�(sh��)��������ѭ�h(hu��n)�Ӕ�(sh��)��(sh��)�F(xi��n)������?y��n)?0C52��Rn�Ĵ������ֵ��255�������ڴˌ�(sh��)�(y��n)���A(ch��)�ϣ�������ѭ�h(hu��n)�Ӕ�(sh��)�� MOV R3,#07H LOOP1:MOV R2,#0FFH LOOP2:MOV R1,#0FFH LOOP3:NOP NOP DJNZ R1,LOOP3 DJNZ R2,LOOP2 ���]����Ƭ�C(j��)�ľ����11.0592MHz����һ��(g��)�C(j��)�����ڞ�1.085us����(j��ng)�^Ӌ(j��)�㮔(d��ng)?sh��)�����ѭ�h(hu��n)�Δ�(sh��)��7�r(sh��)�����t�s����1s�� ����ʹ�Ì�(sh��)�(y��n)������P(gu��n)ܛ��߀�����쾚����(y��ng)�ӏ�(qi��ng)����(x��)�� ��(sh��)�(y��n)ǰ����(y��ng)����Protuesܛ�����M(j��n)�з��棬�ܴܺ�̶�������(sh��)�(y��n)�ɹ����ʣ����·���^����ҪС�Č�(d��o)���g�Ƿ��·����(d��o)���ǽ^�����ֲ���(y��ng)�����^�L��������(sh��)�(y��n)Ҫ�����ģ�����һ��������Դ�^�ͼ�(x��)��(ji��)̎�z���·�������Ƭ�C(j��)�Ƿ�͌�(sh��)�(y��n)�乲�أ��Ƿ��Ќ�(d��o)��Ó��ȵȡ� �����������F(xi��n)���}�������P(gu��n)�]��(sh��)�(y��n)���Դ�ٴΟ�䛣��������²��봮�ڡ� ��֮����(sh��)�(y��n)�^���Е�(hu��)�������N���벻������r��һ��Ҫ�����o�⣬��Ȼ�����M(f��i)�˕r(sh��)�g�����y�l(f��)�F(xi��n)�e(cu��)�`��
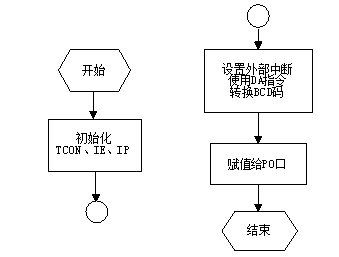
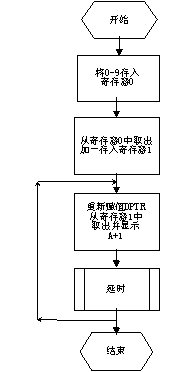
��(sh��)�(y��n)�� 1.����Ҫ�� ����(sh��)�(y��n)Ҫ�� ��1��P0�ڽ�8��(g��)����INT0���_��һ���_�P(gu��n)K0�� ��2��K0�������l(f��)�ⲿ�Д࣬���ⲿ�Д��ӳ����У���K0���µĴΔ�(sh��)�M(j��n)��Ӌ(j��)��(sh��)��Ȼ����BCD�a��ʽ��ͨ�^P0�ڵ�8��(g��)��ݔ��Ӌ(j��)��(sh��)�Y(ji��)����
2.Ӳ��ԭ�� �D1.2.1 ����ԭ��D �˕r(sh��)���I16�Σ��tɫ�l(f��)����O������ǰ��λ��ʾʮ�M(j��n)�Ɣ�(sh��)��ʮλ������λ��ʾʮ�M(j��n)�Ɣ�(sh��)�ĸ�λ���ķ���Y(ji��)����ԇ�(y��n)�Y(ji��)��������(d��ng)���I99�Σ�Ӌ(j��)��(sh��)���㣬�����_ʼӋ(j��)��(sh��)�� 3.ܛ���������� �D1.2.2 �������̈D 4.������� ORG 0000H LJMP MAIN ORG 0003H LJMP INT0P ORG 0013H LJMP INT1P ORG 0020H MAIN: MOV P0,#00H MOV R0,#00H MOV A,#00H SETB IT0 SETB IT1 SETB EX0 SETB EX1 SETB PX0 CLR PX1 SETB EA SJMP $ ORG 0050H INT0P: INC A DA A MOV P0,A RETI END 5.��(sh��)�(y��n)�Ć��}��ӑՓ �P(gu��n)��Protuesʹ�õ�һЩ���}�� ��1����Protues����r(sh��)����Ҫ�õ�P0�ڣ�Ҫӛ�ü�������裬��t�l(f��)����O�ܲ���(hu��)�l(f��)�⣬����(sh��)�(y��n)�����Ѽӿɲ����]�� ��2������ʹ�Õr(sh��)����(y��ng)ע����ʹ�×l��������ֵ���O(sh��)�á� 6.��(sh��)�(y��n)�ĵü����h ��Ƭ�C(j��)�܌�(sh��)�F(xi��n)��ij�N�����ж�N���̷��������X��������W(xu��)�ߣ���(y��ng)ԓ�ȇLԇ�Լ����̣����¾������������L���������@��(g��)�^���о���(x��)�˅R���Z�Ե�ʹ�ã��Լ�����֮���Բ�����P(gu��n)�Y�ϣ������W(w��ng)�ϳ���ij���ă�(y��u)�c(di��n)�����ͬ�W(xu��)��ӑՓ˼·���Еr(sh��)�g����r�»�����³����܌W(xu��)���ܶ�֪�R(sh��)���،�˼�����}�ĽǶȡ�
���h����Protues����r(sh��)������]��ϵ�y(t��ng)�،W(xu��)��(x��)�^Protues���������}ҪŬ���Lԇ��Q����ӛ����@Щ���}�ͽ�Q�k���������ڽ��ČW(xu��)��(x��)��
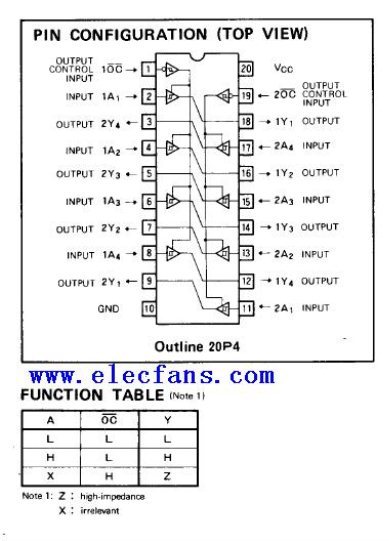
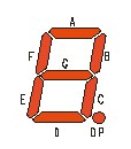
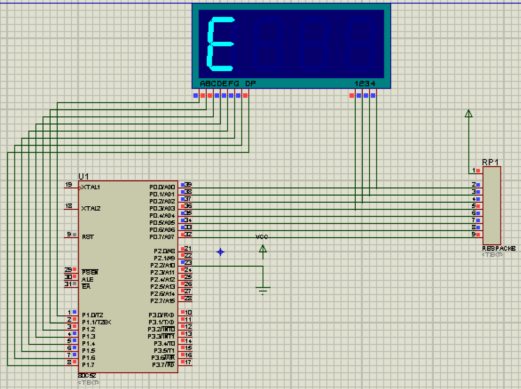
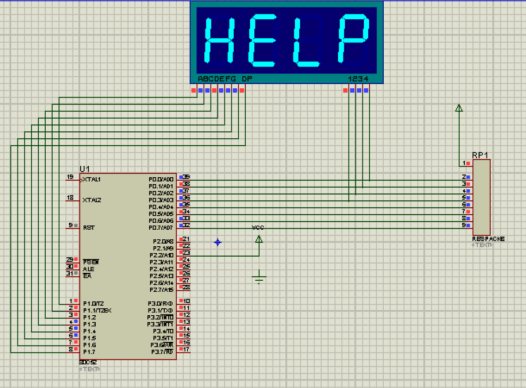
��(sh��)�(y��n)�� 1.����Ҫ�� ����(sh��)�(y��n)Ҫ��P1��ͨ�^�(q��)��(d��ng)оƬ���Ɣ�aݔ����̖(h��o)����P0��ͨ�^�(q��)��(d��ng)оƬ����λ�x��������(sh��)�F(xi��n)���¹��ܣ� (1)��(d��ng)�_�P(gu��n)K0�ӵ��ƽ�r(sh��)����һλ�����@ʾ0���ƣ�Ȼ��ڶ�λ������λ������λ����ѭ�h(hu��n)�ص�һλ�� (2)��(d��ng)�_�P(gu��n)K0�Ӹ��ƽ�r(sh��),��λ��(d��ng)�B(t��i)�@ʾ��HELP���� 2.Ӳ��ԭ�� �D1.3.1 74LS244���_�D�����ܱ� �ڹ�W(xu��)Ԫ����optoelectronics�������и��N��(sh��)�a�ܺ�Һ����7�Ό���(y��ng)Ӣ����7SEG��4λһ�w��Ӣ����MPX4����ꎘOCC,��ꖘOCA������Ӣ�����ɫ����˼������7SEG-MPX4-CA-BLUE��7��4λһ�w��ꖘO�{(l��n)ɫ��(sh��)�a���@ʾ����
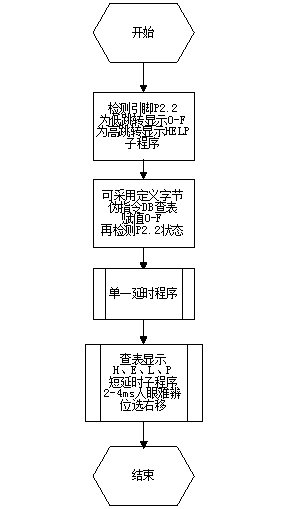
�D1.3.2 ����ԭ��D P2.2�ӵؕr(sh��)��ÿλ�������@ʾ0,1,2,3,4,5,6,7,8,9,A,b,C,d,E,F �D1.3.3 ����ԭ��D P2.2�Ӹ��ƽ�r(sh��)���@ʾ��HELP�� 3.ܛ���������� �D1.3.4 �������̈D 4.������� ORG 0000H LJMP MAIN ORG 0010H MAIN: MOV P0,#10001000B JNB P2.2,LOOP4 JB P2.2,NEXT0 NEXT0:LJMP LOOP5 LOOP4:MOV P1,#0C0H LCALL DELAY JB P2.2,NEXT0 MOV P1,#0F9H LCALL DELAY JB P2.2,NEXT0 MOV P1,#0A4H LCALL DELAY JB P2.2,NEXT0 MOV P1,#0B0H LCALL DELAY JB P2.2,NEXT0 MOV P1,#99H LCALL DELAY JB P2.2,NEXT0 MOV P1,#92H LCALL DELAY JB P2.2,NEXT0 MOV P1,#82H LCALL DELAY JB P2.2,NEXT0 MOV P1,#0F8H LCALL DELAY JB P2.2,NEXT0 MOV P1,#80H LCALL DELAY JB P2.2,NEXT0 MOV P1,#90H LCALL DELAY JB P2.2,NEXT0 MOV P1,#88H LCALL DELAY JB P2.2,NEXT0 MOV P1,#83H LCALL DELAY JB P2.2,NEXT0 MOV P1,#0C6H LCALL DELAY JB P2.2,NEXT0 MOV P1,#0A1H LCALL DELAY JB P2.2,LOOP5 MOV P1,#86H LCALL DELAY JB P2.2,LOOP5 MOV P1,#8EH LCALL DELAY JB P2.2,LOOP5 MOV A,P0 RL A MOV P0,A LJMP LOOP4 ORG 0100H DELAY:MOV R0,#10H LOOP1:MOV R1,#10H LOOP2:MOV R2,#0FFH LOOP3:NOP NOP DJNZ R2,LOOP3 DJNZ R1,LOOP2 DJNZ R0,LOOP1 ;2*255+50*255*2+10*50*255*2us RET LOOP5:MOV R5,P0 MOV P0,#10001000B MOV P1,#89H LCALL DELAY1 JNB P2.2,NEXT1 MOV P1,#86H LCALL DELAY1 JNB P2.2,NEXT1 MOV P1,#0C7H LCALL DELAY1 JNB P2.2,NEXT1 MOV P1,#8CH LCALL DELAY1 JNB P2.2,NEXT1 LJMP LOOP5 ORG 0150H DELAY1:MOV R3,#05H LOOP7:MOV R4,#0FFH LOOP6:NOP NOP DJNZ R4,LOOP6 DJNZ R3,LOOP7 MOV A,P0 RR A MOV P0,A RET NEXT1:MOV P0,R5 LJMP LOOP4 END 5.��(sh��)�(y��n)�Ć��}��ӑՓ ��1�����ڳ����Л]��ʹ��DB��������(d��o)�³������L���ɸߵ��͵�׃���r(sh��)߀���ܾo������һ��ĸ�x��(sh��)���H�܌�(sh��)�F(xi��n)�ɵ͵��ߵ���Ȼ׃���� ��2���ں�ͬ�W(xu��)����ӑՓ�У�ʹ��DBָ��s���˳����L�ȣ��ڲ�ʹ�ò��ָ��ėl���£���HELPѭ�h(hu��n)�����ӳ����У������ӳ����(zh��)����ɺ�֮ǰ�Ĺ�(ji��)�c(di��n)�����^�m(x��)�x��(sh��)�� 6. ��(sh��)�(y��n)�ĵü����h �M����ӛ�Լ��쾚ʹ�ÅR��ָ�������ǰ��(y��ng)�Ȱ�˼·��혣����ó������̈D���@�ӳ���?q��)������͕?hu��)���đ�(y��ng)��һЩ��
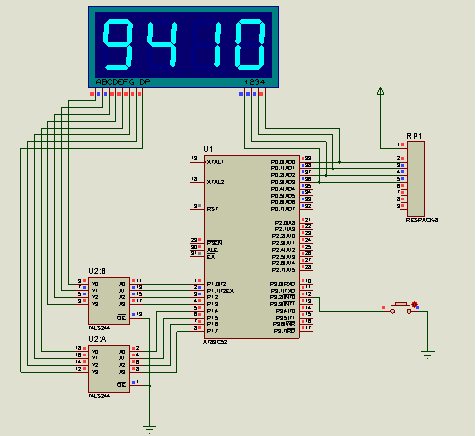
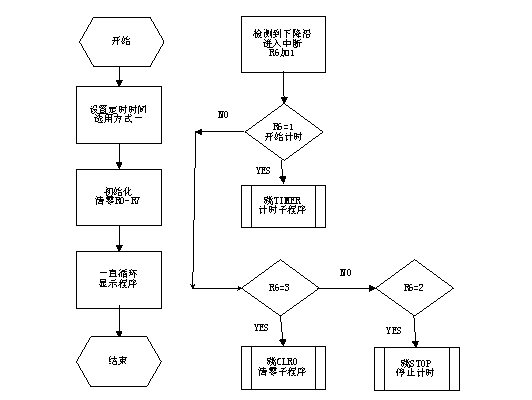
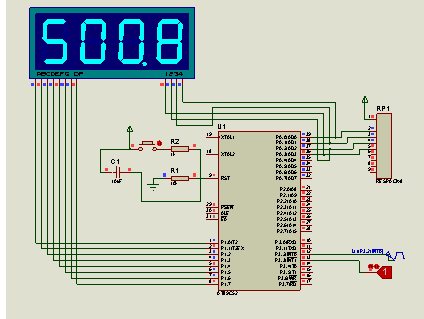
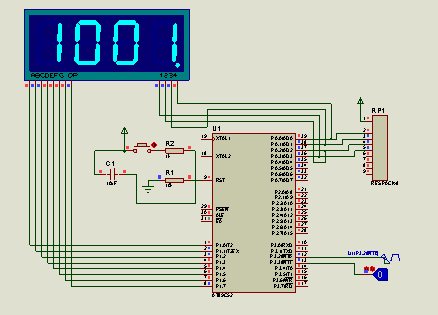
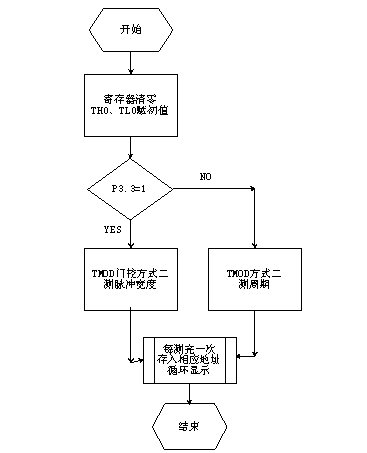
��(sh��)�(y��n)�� 1.����Ҫ�� ��1�� ��T0���r(sh��)����(sh��)�F(xi��n)1�붨�r(sh��)������һ��(g��)LED��1�룬��1�룬������ѭ�h(hu��n)�� ��2�� ��(sh��)�F(xi��n)һ��(g��)4λ����� �� ���_�P(gu��n)K0ģ�M����Ć���(d��ng)��ֹͣ�����㹦�ܣ�K0�|�l(f��)�ⲿ�Д�INT0����һ�Ά���(d��ng)Ӌ(j��)�r(sh��)����һ��ֹͣ���ٰ�һ�����㣬������(g��)��B(t��i)��ѭ�h(hu��n)�� �ڶ��r(sh��)����T0���r(sh��)���Д���ɣ����λ��1/10��Ӌ(j��)��(sh��)������Ӌ(j��)��(sh��)��λ��1�֡�10�롢1�롢1/10�롣 ��Ҫ���ⲿ�Д�INT0�ă�(y��u)�ȼ�����T0�ă�(y��u)�ȼ��� 2.Ӳ��ԭ�� �D1.4.1 Ӳ��ԭ��D(�����@ʾ) 3.ܛ���������� �D1.4.2 ���������D
4.������� ;���_ʼδ�@ʾ����(d��ng)?sh��)�һ�ΰ�K0�r(sh��)���_ʼӋ(j��)�r(sh��)�� ;�M(j��n)һ���Д���1/20�� 50MS ���}������51ݔ��ğo��̖(h��o)����(sh��)���(sh��)�F(xi��n)255Ȼ�����㣬�����@ʾһֱ���㡣 ORG 0000H LJMP MAIN ORG 0003H LJMP INT0P ORG 000BH LJMP T0P ORG 0050H MAIN: MOV P0,#00000001B MOV TMOD,#00000001B MOV TL0,#0B0H ;ѭ�h(hu��n)2����ѣ��`��С ,1/10 second MOV TH0,#3CH SETB ET0 SETB IT0 SETB EX0 SETB EA MOV R1,#00H MOV R2,#00H MOV R3,#00H MOV R4,#00H MOV R5,#00H MOV R6,#00H MOV R7,#00H MOV DPTR,#0400H W: LCALL XIANSHI SJMP W ;����������һֱ�@ʾ T0P: INC R3 MOV TL0,#0B0H ;ѭ�h(hu��n)2����ѣ��`��С ,1/10 second MOV TH0,#3CH CJNE R3,#2,BACK INC R2 MOV R3,#00H CJNE R2,#10,BACK INC R4 MOV R2,#00H CJNE R4,#10,BACK INC R5 MOV R4,#00H CJNE R5,#06,BACK INC R7 MOV R5,#00H CJNE R7,#10,BACK MOV R7,#00H BACK: RETI INT0P: INC R6 CJNE R6,#01H,CLR0 SETB TR0 CLR0: CJNE R6,#03H,TIMER MOV R1,#00H MOV R2,#00H MOV R3,#00H MOV R4,#00H MOV R5,#00H MOV R6,#00H MOV R7,#00H LJMP STOP1 TIMER: CJNE R6,#02H,STOP1 CLR TR0 MOV TH1,#3CH MOV TL1,#0B0H STOP1: RETI ORG 0250H XIANSHI: MOV A,R2 MOVC A,@A+DPTR MOV P1,A LCALL DELAY MOV P0,#00000010B MOV A,R4 MOVC A,@A+DPTR MOV P1,A LCALL DELAY MOV P0,#00000100B MOV A,R5 MOVC A,@A+DPTR MOV P1,A LCALL DELAY MOV P0,#00001000B MOV A,R7 MOVC A,@A+DPTR MOV P1,A LCALL DELAY MOV P0,#00000001B RET ORG 0350H DELAY: MOV R0,#05H ;2*255+2*255*5=3060US LOOP0: MOV R1,#0FFH LOOP1: NOP NOP DJNZ R1,LOOP1 DJNZ R0,LOOP0 RET ORG 0400H DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H DB 80H,90H ;0~9 END ��1����(sh��)�(y��n)ͨ�^Ӌ(j��)�r(sh��)��0������ʽһ��(sh��)�F(xi��n)��λ���Ӌ(j��)�r(sh��)���ܣ�ʹTH0��TL0��ʼֵ�M����С���p������Ӌ(j��)�r(sh��)���Д�ĴΔ�(sh��)���Ԝp���`� ��2����(y��ng)ע�⾧���l�ʣ��M���ܾ��_Ӌ(j��)�r(sh��)�� ��(sh��)�(y��n)ǰ����˼·����Ҫ��ע���Д�Ɍ����^�L���^�L���ܕ�(hu��)��(d��o)��Ƭ�C(j��)�\(y��n)���e(cu��)�`�� ��(sh��)�(y��n)�� 1.����Ҫ�� �� �����O(sh��)Ӌ(j��)�y�������������B�m(x��)�y��ݔ���}�_���ȣ������߶�LED�@ʾ�Y(ji��)���� �� �����O(sh��)Ӌ(j��)�y�������������B�m(x��)�y��ݔ���}�_���ڣ������߶�LED�@ʾ�Y(ji��)���� �� �����O(sh��)Ӌ(j��)�y��������ͬ�r(sh��)�y���}�_���Ⱥ����ڣ����_�P(gu��n)K0�x���@ʾ�}�_����߀���@ʾ�}�_���ڡ� 2.Ӳ��ԭ�� �D1.5.1 Ӳ��ԭ��D �D1.5.2 Ӳ��ԭ��D 3.ܛ���������� �D1.5.3 ���������D 4.������� ORG 0000H LJMP MAIN ORG 0003H LJMP INT0P ORG 000BH LJMP T0P ORG 0100H MAIN: MOV R1,#0 MOV R2,#0 MOV R3,#0 MOV R4,#0 MOV R5,#0 MOV R6,#0 MOV R7,#0 MOV 30H,#0C0H MOV 31H,#0C0H MOV 32H,#0C0H MOV 33H,#0C0H MOV 21H,#0 SETB IT0 SETB EX0 SETB ET0 SETB EA XIAN0: LCALL XIANSHI LJMP XIAN0 T0P: INC R3 CJNE R3,#10,BACK MOV R3,#0 INC R4 CJNE R4,#10,BACK MOV R4,#0 INC R5 CJNE R5,#10,BACK MOV R5,#0 INC R6 CJNE R6,#10,BACK MOV R6,#0 INC R7 BACK: RETI INT0P: INC 21H MOV A,21H CJNE A,#1,ER2 JB P3.3,WIDTH TIME: MOV TMOD,#02H SJMP START WIDTH: JNB P3.3,TIME MOV TMOD,#0AH START: MOV TH0,#164 MOV TL0,#164 SETB TR0 ER2: CJNE A,#2,BACK1 CLR TR0 MOV A,TL0 SUBB A,TH0 MOV B,#10 DIV AB MOV R2,A MOV R1,B CJNE R7,#0,DDIAN3 CJNE R6,#0,DDIAN2 CJNE R5,#0,DDIAN1 MOV R0,#1 LJMP CUN DDIAN3: MOV R0,#4 LJMP CUN DDIAN2: MOV R0,#3 LJMP CUN DDIAN1: MOV R0,#2 CUN: LCALL CHA MOV 30H,A INC R0 LCALL CHA MOV 31H,A INC R0 LCALL CHA MOV 32H,A INC R0 LCALL CHA MOV 33H,A MOV 21H,#0 MOV R3,#0 MOV R4,#0 MOV R5,#0 MOV R6,#0 MOV R7,#0 BACK1: RETI XIANSHI:MOV DPTR,#TAB MOV P0,#01H MOV P1,30H LCALL DELAY MOV P0,#02H MOV P1,31H LCALL DELAY MOV P0,#04H MOV P1,32H LCALL DELAY MOV P0,#08H MOV P1,33H LCALL DELAY RET CHA: MOV A,@R0 MOVC A,@A+DPTR CJNE R0,#4,BACK2 ADD A,#0AH ;��ʮ,��С��(sh��)�c(di��n) BACK2: RET DELAY: MOV 23H,#03H LOP1: MOV 22H,#0FFH LOOP: NOP DJNZ 22H,LOOP DJNZ 23H,LOP1 RET TAB: DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H END 5.��(sh��)�(y��n)�Ć��}��ӑՓ �ò�ԃ���l(f��)�F(xi��n)��(sh��)�a�ܵ��@ʾ��(hu��)�ܜy���}�_�l�ʵ�Ӱ푣�Ȼ���x���Д෨���ڙz�y���}�_�½��ؕr(sh��)�_ʼӋ(j��)�r(sh��)�������T��λ��ʽ���y�}�_���ȣ���ʽ���y�}�_���ڡ� 6.��(sh��)�(y��n)�ĵü����h ��(sh��)�(y��n)�������y���}�_���ڞ�100us�ı���(sh��)�r(sh��)����(hu��)���F(xi��n)�^���`������l(f��)�F(xi��n)����?y��n)�?d��ng)Ӌ(j��)�r(sh��)�_(d��)��100us�r(sh��)�����`����������Д�ʧ����100��λӋ(j��)��(sh��)��һ�����Q�@һ���}���m��(d��ng)�Ӵ���λ�`���ԜpС���w�`�
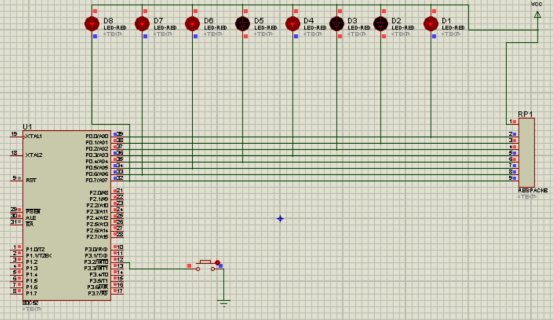
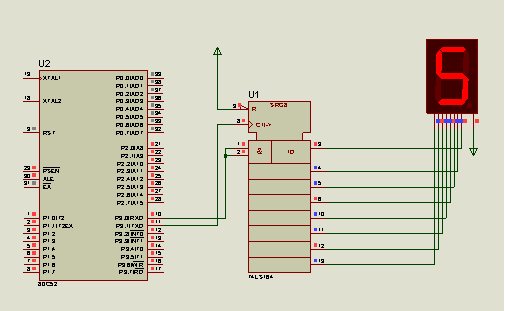
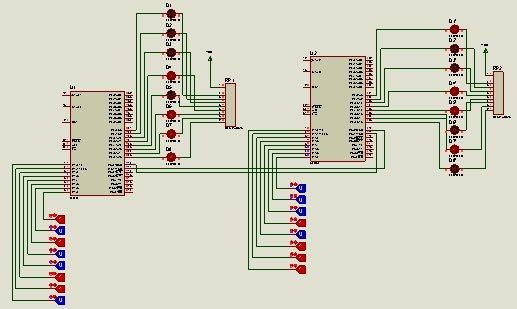
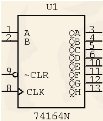
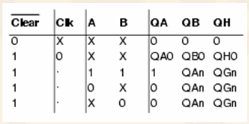
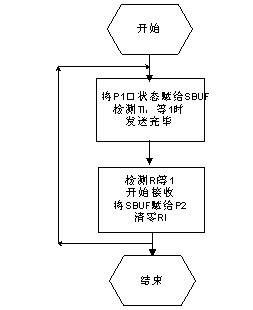
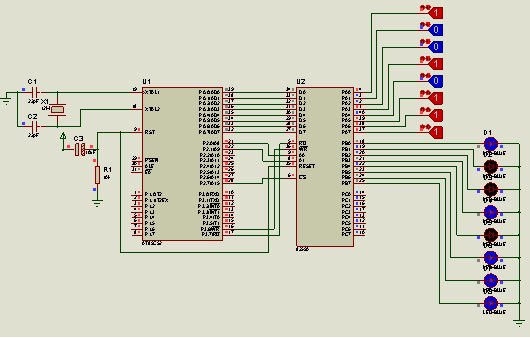
��(sh��)�(y��n)�� �����ô��пڷ�ʽ0��(sh��)�F(xi��n)һ��(g��)�߶Δ�(sh��)�a�ܵ��@ʾ���ƣ�݆���@ʾ0����ʮ��(g��)��(sh��)�a�� �ڃ���һ�M�����î���ͨ�Ź��܌�һ���ģ���(g��)���I�ĸߵ��ƽ��B(t��i)������һ������������һ���ģ���(g��)LED�@ʾ���_�P(gu��n)��B(t��i)��Ҫ���p��ͨ�ţ������@ʾ�� 2.Ӳ��ԭ�� �D1.6.1 Ӳ��ԭ��D �D1.6.2 Ӳ��ԭ��D �D1.6.3 74LS164���_�D ��1.6.1 74LS164���ܱ� 3.ܛ���������� �D1.6.4 ��(sh��)�(y��n)1���̈D�D1.6.5 ��(sh��)�(y��n)2���̈D 4.������� ��(sh��)�(y��n)1��݆���@ʾ0-9 ORG 0000H LJMP MAIN ORG 0100H MAIN: MOV SCON,#00H ;SM0,SM1,SM2,REN,TB8,RB8,TI,RI MOV DPTR,#TAB TRAM1: MOV R3,#00H TRAM: MOV A,R3 MOVC A,@A+DPTR MOV SBUF,A CJNE R3,#0AH,WAIT MOV R3,#00H LJMP TRAM1 WAIT: JBC TI,NEXT SJMP WAIT NEXT: INC R3 LCALL DELAY LJMP TRAM ORG 0200H DELAY: MOV R2,#03H LOOP2: MOV R0,#09FH LOOP0: MOV R1,#0FFH LOOP1: NOP NOP DJNZ R1,LOOP1 DJNZ R0,LOOP0 DJNZ R2,LOOP2 ;2*255+2*255*255+2*255*255*8~1S RET ORG 0300H TAB: DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H END ��(sh��)�(y��n)2���p��ͨ�ţ������@ʾ ORG 0000H LJMP MAIN ORG 0030H MAIN: MOV SCON,#50H ;��ʽ1,�ҽ��յ��Ĕ�(sh��)��(j��)��Ҫ���� MOV TMOD,#20H ;T1�������ʰl(f��)���� MOV PCON,#80H ;�����ʼӱ� MOV TH1,#0F4H ;bps:(2^1/32)*1/(2^8-244)*12/11.0592=4800 MOV TL1,#0F4H SETB TR1 SETB EA TRAN: MOV SBUF,P1 WAIT: JBC TI,NEXT SJMP WAIT NEXT: JNB RI,TRAN MOV P2,SBUF CLR RI LJMP TRAN END 5.��(sh��)�(y��n)�Ć��}��ӑՓ - ��(sh��)�(y��n)1���y�c(di��n)���ڌ�74LS164�����գ�ʹ�ô��ڷ�ʽ0�r(sh��)����Ƭ�C(j��)TXD��оƬ�r(sh��)��}�_��CLK����CLR����ƽ��Ч����ˣ��ڱ���(sh��)�(y��n)�п�ֱ�ӽӸ��ƽ��
- ���ڂ�ݔ��ݔ�����λ��ͨ�^��λ�Ĵ�����QH��ݔ����
- ��(sh��)�(y��n)2Ҫע���Ƭ�C(j��)�l(f��)�ͺͽ��յėl������(d��ng)TI��1�r(sh��)���l(f��)���ꮅ����(d��ng)RI��1�r(sh��)���_ʼ���ա����⣬�ڴӲ���·�r(sh��)Ҫע��ɂ�(g��)��Ƭ�C(j��)����ء�
6.��(sh��)�(y��n)�ĵü����h ����(sh��)�(y��n)�����۸��ֵͣ���ʹ����ɹ����ڌ�(sh��)�H�·���ԕ�(hu��)�������N���}��Ҫ���࿂�Y(ji��)��(j��ng)�(y��n)����߄�(d��ng)��������
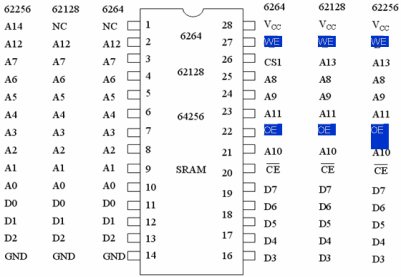
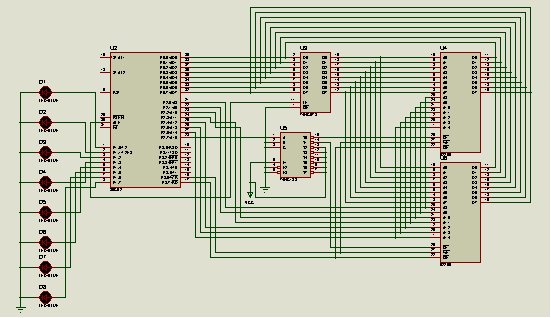
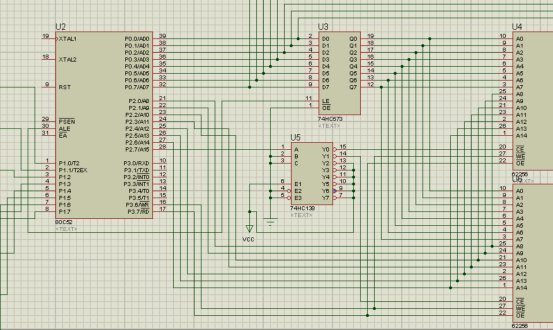
��(sh��)�(y��n)�� 1.����Ҫ�� ����(sh��)�(y��n)Ҫ������74LS573�M(j��n)�п����U(ku��)չ���B�Ӄ�Ƭ62256������74LS138��ɵ�ַ���䣻��һƬ62256��ǰ10��(g��)�ֹ�(ji��)�ă�(n��i)�ݼ�1�������һƬ62256�У��x������8��(g��)LED�@ʾ�� 2.Ӳ��ԭ�� �o����(sh��)�(y��n)��Ӳ��ԭ��D���������·ԭ�����÷������Ӳ���·�O(sh��)Ӌ(j��)�� 1��74LS138���_�D �D1.7.1 74LS138���_�D��1.7.1 74LS138����
2��62ϵ��SRAM���_ �D1.7.2 62ϵ��SRAM���_
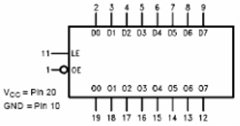
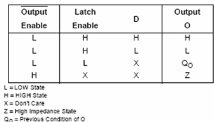
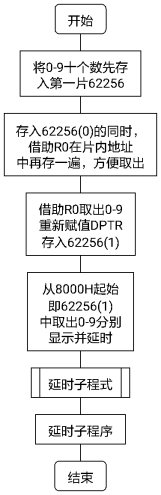
3��74LS573 �D1.7.3 74LS573���_�D��1.7.2 74LS573���ܱ� 4.Protues���� �D1.7.4 ����ȫ�D �D1.7.5 ���沿�ּ�(x��)��(ji��)�D 3.ܛ���������� �D1.7.6 ���������D 4.������� ORG 0000H LJMP MAIN ORG 0030H MAIN: MOV R0,#00H MOV DPTR,#0000H WRITE: MOV A,R0 MOVX @DPTR,A MOV @R0,A INC R0 INC DPTR CJNE R0,#0AH,WRITE ;��һƬ62256,����0~9 MOV DPTR,#8000H ;62256 32K*8,�ڶ�Ƭ622556 READ: MOV P2,#00H MOV R0,#00H LOOP0: MOV A,@R0 INC A MOVX @DPTR,A INC R0 INC DPTR CJNE R0,#0AH,LOOP0 ;����һƬ��ǰ10��(g��)�ֹ�(ji��)��һ����ڶ�Ƭ MOV DPTR,#8000H ;�@ʾ1 2 3 4 5 6 7 8 9 10 MOV R0,#00H LOOP3: MOVX A,@DPTR MOV P1,A LCALL DELAY INC DPTR INC R0 CJNE R0,#0AH,LOOP3 LJMP MAIN ORG 0200H DELAY: MOV 50H,#06H LOOP1: MOV 51H,#0FFH LOOP2: MOV 52H,#0FFH DJNZ 52H,$ DJNZ 51H,LOOP2 DJNZ 50H,LOOP1 RET END 5.��(sh��)�(y��n)�Ć��}��ӑՓ ��(sh��)�(y��n)�қ]��622569��32K*8��оƬ���x����6264��8K*8��оƬ��ֻ�茢�����еĵڶ�Ƭ6264�ⲿ�U(ku��)չ��ַ�Ğ�2000H,��A13(P2.5)���g�a����1�_���g�a��2��3�_�ӵأ�A14(P2.6)��A15(P2.7)Ҳ�ӵؼ��ɡ� 6.��(sh��)�(y��n)�ĵü����h ����(sh��)�(y��n)����ľ����������y���y�c(di��n)���ھ�·�Ĵ����r(sh��)һ��Ҫ��(x��)�ģ�����(f��)�z�飬�ǰ��(y��ng)��Ҏ(gu��)���������Ĕ[�ţ������ڌ�(sh��)�(y��n)�Ŀ����M(j��n)�С�
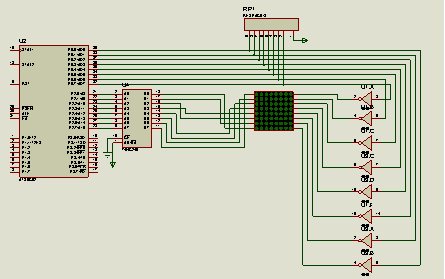
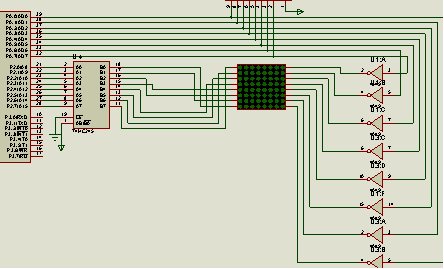
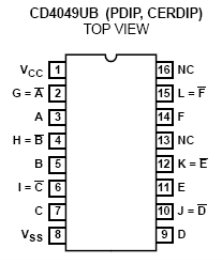
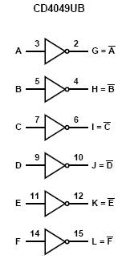
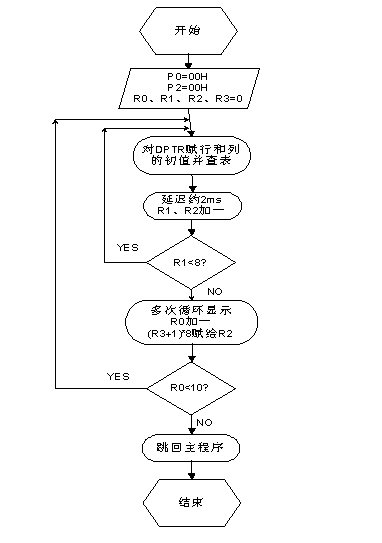
��(sh��)�(y��n)�� 1.����Ҫ�� ����(sh��)�(y��n)����LED�c(di��n)�ģ�K��(d��ng)�B(t��i)���@ʾ���O(sh��)�ַ���D�Σ��O(sh��)Ӌ(j��)ѭ�h(hu��n)�@ʾ��(sh��)��0-9�� 2.Ӳ��ԭ�� �D1.8.1 Ӳ��ԭ��D����ܛ�������@ʾ�� �D1.8.2 Ӳ��ԭ����(x��)��(ji��)�D����ܛ�������@ʾ�� �D1.8.3 SD411988��(n��i)���Y(ji��)��(g��u) �D1.8.4 CD4049���_�D����(n��i)���Y(ji��)��(g��u) 3.ܛ�������� �̈D �̈D �D1.8.5 ���������D 4.������� ORG 0000H LJMP MAIN ORG 0030H MAIN: MOV P0,#0FFH MOV P2,#0FFH MOV R0,#00H ;�@ʾ��Ļ�Σ���ÿһĻ�@ʾ�Ĕ�(sh��)��ֵ0-9 MOV R1,#00H ;�дa����̖(h��o)��0 MOV R2,#00H ;�дa����̖(h��o)�ó�ֵ MOV R3,#00H LOOP3:MOV 52H,#0FH XIANS:MOV DPTR,#ROW ;ȡ�дa�� ��ַ MOV A,R2 MOVC A,@A+DPTR MOV P2,A ;ݔ����̖(h��o) MOV DPTR,#COL ;ȡ�дa�� ��ַ MOV A,R1 MOVC A,@A+DPTR MOV P0,A LCALL DL0 INC R1 INC R2 CJNE R1,#08H,XIANS MOV R1,#00H MOV A,R3 MOV R2,A DJNZ 52H,XIANS INC R0 ;��R0��(g��)��(sh��) MOV A,R0 MOV B,#08H MUL AB MOV R3,A MOV R2,A CJNE R0,#10,LOOP3 LJMP MAIN ORG 0650H DL0: MOV 50H,#03H LOOP0:MOV 51H,#0FFH LOOP1:NOP NOP DJNZ 51H,LOOP1 DJNZ 50H,LOOP0 ;2*255+2*255*3=2040US RET ORG 0800H COL: DB 01H,02H,04H,08H,10H,20H,40H,80H ;��ֵ ORG 0850H ROW: DB 00H,00H,3EH,41H,41H,41H,3EH,00H ;0 DB 00H,00H,00H,00H,21H,7FH,01H,00H ;1 DB 00H,00H,27H,45H,45H,45H,39H,00H ;2 DB 00H,00H,22H,49H,49H,49H,36H,00H ;3 DB 00H,00H,0CH,14H,24H,7FH,04H,00H ;4 DB 00H,00H,72H,51H,51H,51H,4EH,00H ;5 DB 00H,00H,3EH,49H,49H,49H,26H,00H ;6 DB 00H,00H,40H,40H,40H,4FH,70H,00H ;7 DB 00H,00H,36H,49H,49H,49H,36H,00H ;8 DB 00H,00H,32H,49H,49H,49H,3EH,00H ;9 END 5.��(sh��)�(y��n)�Ć��}��ӑՓ ��1����(sh��)�(y��n)��ʹ�õ�SD411988LED�c(di��n)����и��еͣ������������^���Б�(y��ng)�Ƚoÿһ���xֵ����(d��ng)�О�ߌ���(y��ng)�О�͕r(sh��)������(y��ng)�İl(f��)����O�ܱ��c(di��n)���� ��2����(sh��)�(y��n)�r(sh��)�����c(di��n)����һ�в���(hu��)���c(di��n)������r����(j��ng)�z���l(f��)�F(xi��n)�����B�ӕr(sh��)���������_�����M(j��n)�˿��·���δ����˿ڡ� ��3���ڷ���r(sh��)���c(di��n)����Ⱥܰ����ڼ������(q��)��(d��ng)74LS244����r�õ����@���ơ� 6. ��(sh��)�(y��n)�ĵü����h ��(sh��)�C������(sh��)�(y��n)�^���в��ܾ����ڌ�(sh��)�(y��n)�v�x�Ќ�����������(y��ng)����(j��)��(sh��)�H��r�{(di��o)���·���_(d��)���A(y��)��Ч����
�ڶ����� ��Ƭ�C(j��)�ӿڌ�(sh��)�(y��n) ��(sh��)�(y��n)һ ����8255�IJ��ڔU(ku��)չ��(sh��)�(y��n) 1.����Ҫ�� ���˽�8255оƬ�Y(ji��)��(g��u)��������ʽ�� �ڌW(xu��)��(x��)ʹ��8255оƬ��(sh��)�F(xi��n)��Ƭ�C(j��)�c�ⲿ�O(sh��)���ݔ�� 2.Ӳ��ԭ�� �D2.1.1 Ӳ��ԭ��D 3.ܛ���������� �D2.1.2 ���������D 4.������� ORG 0000H LJMP MAIN ORG 0030H MAIN: MOV A,#90H ;1 0010 000 A��ʽ0ݔ�룬B��ʽ0ݔ�� MOV DPTR,#7FFFH ;A0 A1����1�x����ƿ� MOVX @DPTR,A MOV DPTR,#7CFFH MOVX A,@DPTR ;Aݔ�� MOV DPTR,#7DFFH ;ָ��˿�B MOVX @DPTR,A LCALL DELAY LJMP MAIN ORG 0200H DELAY: MOV R0,#05FH LOOP0: MOV R1,#0FFH LOOP1: NOP NOP DJNZ R1,LOOP1 DJNZ R0,LOOP0 RET END 5.��(sh��)�(y��n)�Ć��}��ӑՓ ע�⑪(y��ng)���x����ƿڣ�Ҏ(gu��)��ݔ��ݔ���˿ں�ݔ��ݔ����ʽ��DPTR��I/O��ַ16λ�Ĵ������]���õ������_�x1�� 6.��(sh��)�(y��n)�ĵü����h �����ӿڌ�(sh��)�(y��n)�r(sh��)����(y��ng)��W(xu��)��(x��)�������ⲿоƬ�����Լ��B�ӷ�ʽ�� �Lԇ�M��ӛ��оƬ������Լ������_���ܡ�
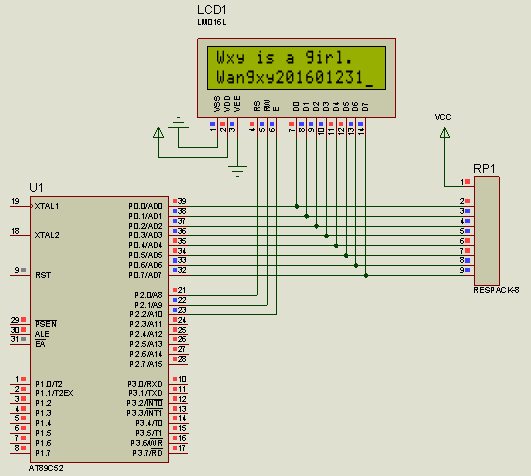
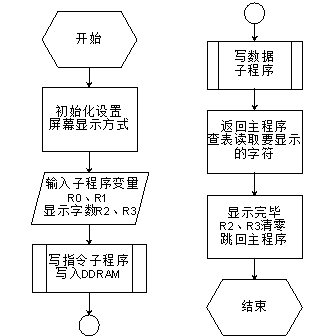
��(sh��)�(y��n)ʮһ LCM���ƌ�(sh��)�(y��n) 1.����Ҫ�� ����cLCM1602�Ľӿڣ����Lԇ���N�@ʾ���ƹ��ܡ� 2.Ӳ��ԭ�� �D2.11.1 Ӳ��ԭ��D 3.ܛ���������� �D2.11.2 ���������D 4.������� ORG 0000H LJMP MAIN ORG 0030H MAIN: LCALL CSH MOV R2,#00H MOV R3,#00H MOV R0,#80H LCALL WRI MOV DPTR,#TAB FIRST:MOV A,R2 MOVC A,@A+DPTR MOV R1,A LCALL WRD MOV 50H,#0FFH LCALL DELAY INC R2 CJNE R2,#14,FIRST MOV R0,#0C0H LCALL WRI MOV DPTR,#TAB1 SEC: MOV A,R3 MOVC A,@A+DPTR MOV R1,A LCALL WRD MOV 50H,#0FFH LCALL DELAY INC R3 CJNE R3,#16,SEC LJMP MAIN ;********�ӕr(sh��)�ӳ���****** ORG 0200H DELAY:MOV 51H,#0FFH DJNZ 51H,$ DJNZ 50H,DELAY RET ;********��ָ����a�ӳ���****** ORG 0250H WRI: CLR P2.0 ;RS=0 ָ�� SETB P2.1 ;RW=1,æ��(bi��o)־�͵�ַӋ(j��)��(sh��)���x���� LOP0: SETB P2.2 ;E=1,�x��ʹ�ܣ����ƽ��Ч MOV P0,#0FFH ;�xP0�ڠ�B(t��i) MOV A,P0 ;�xP0�ڠ�B(t��i),�xIR CLR P2.2 ANL A,#80H CJNE A,#0,LOP0 ;D7�_��ߕr(sh��)��æ�ڃ�(n��i)��������һֱ�z�y CLR P2.0 CLR P2.1 SETB P2.2 MOV P0,R0 MOV 50H,#2 ;�ӕr(sh��)�s510Us LCALL DELAY CLR P2.2 ;RS=0,RW=0,E�½���,��ָ����a RET ;********����(sh��)��(j��)�ӳ���****** ORG 0450H WRD: CLR P2.0 ;RS=0 ָ�� SETB P2.1 ;RW=1,æ��(bi��o)־�͵�ַӋ(j��)��(sh��)���x���� LOP1: SETB P2.2 ;E=1,�x��ʹ�ܣ����ƽ��Ч MOV P0,#0FFH ;�xP0�ڠ�B(t��i) MOV A,P0 ;�xP0�ڠ�B(t��i),�xIR CLR P2.2 ANL A,#10000000B CJNE A,#0,LOP1 ;D7�_��ߕr(sh��)��æ�ڃ�(n��i)��������һֱ�z�y SETB P2.0 CLR P2.1 MOV P0,R1 MOV 50H,#2 LCALL DELAY SETB P2.2 MOV 50H,#2 LCALL DELAY CLR P2.2 RET ;********��ʼ�����ӳ���****** ORG 0600H CSH: MOV R0,#38H LCALL WR ;L L L L H H(DL 8λ��(sh��)��(j��)�ӿ�ģʽ) H(�pN) L(F) L L �p���@ʾ������5*7 MOV R0,#0FH LCALL WRI ;LL L L L L H H H H �_�@ʾ�����(bi��o)�W�q MOV R0,#01H LCALL WRI ;���LCD�@ʾ�� RET ORG 0800H TAB: DB 57H,78H,79H,20H,69H,73H,20H,61H,20H,67H,69H,72H,6CH,2EH ;Wxy is a girl. ORG 0850H TAB1: DB 57H,61H,6EH,67H,78H,79H,32H,30H,31H,36H,30H,31H,32H,33H,31H,32H ;Wangxy2016012312 END 5.��(sh��)�(y��n)�Ć��}��ӑՓ ��1�����]��ʹ�����Ñ��O(sh��)���@ʾ���ܣ��������T��(zh��)�Ќ�ָ�����(sh��)��(j��)����������ʼ���@ʾ�O(sh��)�ú͌�ָ�(sh��)��(j��)�������ӳ�������������ֱ���{(di��o)�ü��ɡ� ��2��ע����ÿ�Έ�(zh��)�Ќ������^�̕r(sh��)����(y��ng)�șz�y�����Ƿ���æ������æ��(zh��)�����P(gu��n)ָ���æѭ�h(hu��n)�z�yֱ����æ�� ��3��ÿ���x�����_ǰ����(y��ng)����λE�x��ʹ�ܶˡ� 6.��(sh��)�(y��n)�ĵü����h �ⲿ�O(sh��)�书���^�ָ࣬��Ҳ�^��(f��)�s����(sh��)�(y��n)ǰҪ������˼·���м�(x��)�x�ⲿ�O(sh��)������P(gu��n)���ܽ�B�� ���h����(sh��)�(y��n)�в���Ӳ���Է�����棬���Ҹ������ڌ�(sh��)�(y��n)���M(j��n)�С�
�n���ĵü����h ����(g��)�W(xu��)�������y����һ���n���ǡ��C(j��)ԭ�����ӿڼ��g(sh��)�����Լ����n��������һ������֪�R(sh��)�c(di��n)���^��(x��)�飬��Ҫ���о���W(xu��)��(x��)����һ���������ώ��Ď���(d��ng)�£��n�÷Շ��e�O���S�����Xÿ��(g��)ͬ�W(xu��)���ں��J(r��n)���˼�����Լ��벻�����߄��뵽�Ć��}��Ҳ����(hu��)��ͬ�W(xu��)���r(sh��)����������n�����кܶ�ͬ�W(xu��)�����ώ����|�������ܸ��x���ώ�һ������J(r��n)�����n���҂���ČW(xu��)���ܶ��|������(d��ng)��(sh��)�(y��n)����ɾ����y���Ա��ġ� ���h��(sh��)�(y��n)�Һ͌�(sh��)�(y��n)ָ��(d��o)���ܸ���һЩ��������̭һЩ�ϻ������õ�оƬ���U(ku��)չһЩȤζ��(sh��)�(y��n)�������nj����A(ch��)��(sh��)�(y��n)֪�R(sh��)���M(j��n)һ���\(y��n)�ã�������(qi��ng)ͬ�W(xu��)���ČW(xu��)��(x��)�dȤ�����l(f��)ͬ�W(xu��)���Č�(sh��)�(y��n)���顣
������Word��ʽ�ęn51�����d��ַ��
 ��Ƭ�C(j��)ԭ�팍(sh��)�(y��n)���Y(ji��).doc
(1.24 MB, ���d��(sh��): 10)
��Ƭ�C(j��)ԭ�팍(sh��)�(y��n)���Y(ji��).doc
(1.24 MB, ���d��(sh��): 10)
2018-8-15 12:04 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
|





 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664









 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��